
基于SVPWM的鼠笼异步风力发电机直接 转矩控制研究与实验
2018-12-18 03:04,
电气开关 2018年3期
,
(广西大学,电气工程学院,广西 南宁 530004)
1 引言
随着传统化石燃料的耗尽和环境污染问题日益突出,人们将目光投向可再生的新能源发电机技术。在众多的可再生能源发电技术中,风力发电因其技术成熟、成本较低和大规模开发利用的优势成为新能源发展最快、最具有竞争力的发电技术[1]。风力发电系统的结构也经历了三个时期的改变,在早期使用最多的是定速型鼠笼异步发电机系统,其定子绕组直接和电网连接对电网干扰较大且发电效率较低;目前,市场安装最多风力发电机为变速的双馈异步发电机,其调速范围有限且定子绕组和电网直接相连不利于低电压穿越控制;为了改进以上两种风力发电系统的不足,新一代全变速风力发电系统产生,有效提高了风力发电系统的效率和低电压穿越性能[2]。在全变速风力发电系统中,主要使用永磁同步发电机和鼠笼异步发电机,相比于永磁同步风力发电机,鼠笼异步发电机具有结构简单牢固、体积小、维护及运行成本低、无永磁体退磁的隐患等特点,在数千千瓦功率等级的风力发电运用中,使用鼠笼异步发电机是一个值得考虑的方案[2-4]。已有文献[3-6]对鼠笼异步风力发电系统进行了研究,文献[5-6]针对鼠笼异步发电机双PWM变流器系统采用矢量控制进行了实验研究,但矢量控制需要较多的电机参数且电机参数容易发生变化,降低了系统的鲁棒性。文献[3]针对鼠笼异步风力发电机三电平变流器系统提出了直接转矩控制,但只进行了仿真分析。文献[4]提出一种鼠笼异步风力发电机预测转矩控制策略,此算法结构较为复杂且需要较多的电机参数。
针对上述问题,本文对全变速鼠笼异步风力发电系统双PWM变流系统,提出发电机侧变流器基于SVPWM的直接转矩控制策略,降低控制算法对发电机参数的过度依赖,提高发电机电磁转矩和磁链控制的响应速度;电网侧变流器采用电网电压定向的控制策略,将发电输出电能并入电网。最后,通过实验验证了所提控制策略的正确性与有效性。
2 全变速鼠笼异步风力发电机系统结构

图1 全变速鼠笼异步风力发电机系统结构
全变速鼠笼异步风力发电机系统结构如图1所示,风力机通过齿轮箱变速后连接鼠笼异步发电机,发电机的定子端口经过两个电压型PWM变流器连接至电网。在由两个电压型的PWM变流器构成的“背靠背”结构,发电机和电网之间固有隔离,使得整个系统控制具有很好的灵活性。由于鼠笼异步发电机没有励磁装置,不能独立建压发电机,机侧变流器的主要功能是为发电机提供励磁控制以及调节发电机的转速使其追踪最大的风能;电网侧逆变器主要作用是稳定中间直流电容两端的电压,并将发电输出电能并入大电网。
3 基于SVPWM的鼠笼异步风力发电机直接转矩控制策略
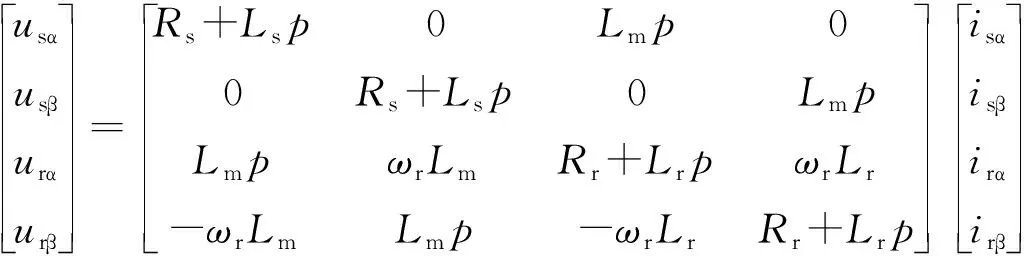
按电动机惯例建立鼠笼异步发电机在αβ坐标系的数学模型为[9]:
(1)

(2)

(3)
上式中urα,urβ表示发电机转子电压在α,β轴上的分量;usα,usβ表示发电机定子电压在α,β轴上的分量。isα,isβ表示电机定子电流在α,β轴上的分量,irα,irβ表示发电机定子电流在α,β轴上的分量。ψrα,ψrβ表示发电机转子磁链在α,β轴上的分量,ψsα,ψsβ表示发电机定子磁链在α,β轴上的分量。ωr表示发电机转子角速度,示电磁转矩。
齿轮箱的作用,风轮机和鼠笼异步发电机的动态关系可由下面的表达式反映:
(4)
式中J表示发电机的转动惯量;Tmech表示风力机输入机械转矩。
基于SVPWM的鼠笼异步风力发电机直接转矩控制策略框图如图2所示,直接对发电机定子磁链和电磁转矩进行控制,不涉及电流内环控制加快了系统的响应速度。相比与传统基于滞环比较器和开关表的直接转矩控制,本文采用基于SVPWM的控制策略能够有效降低转矩和磁链的脉动。
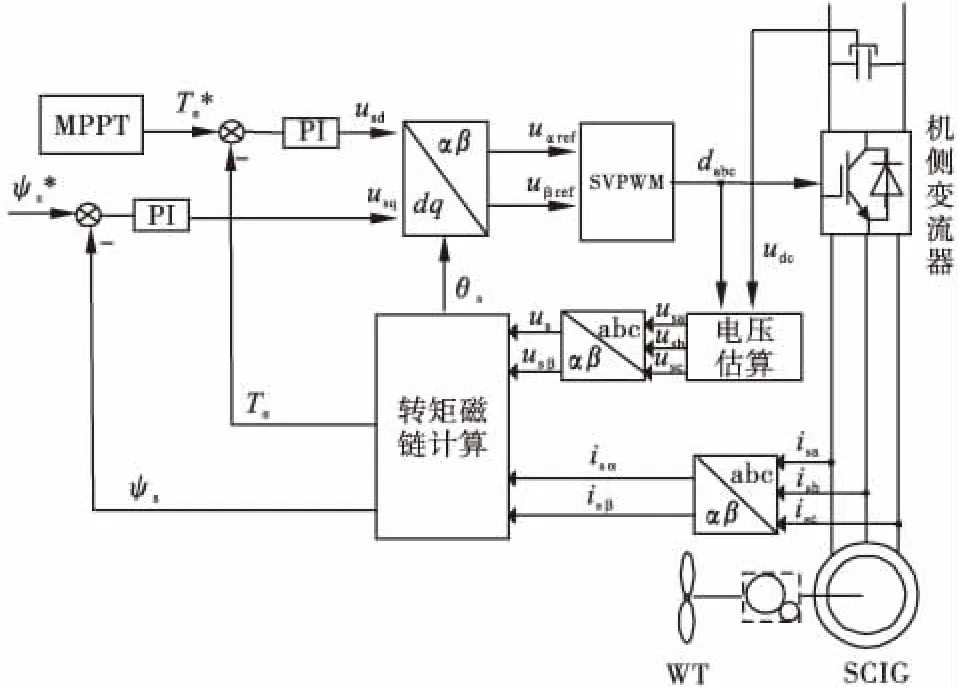
图2 发电侧变流器控制框图
由机侧变流器控制占空比信号da、db、dc和直流侧电压计算出发电机定子电压如下:
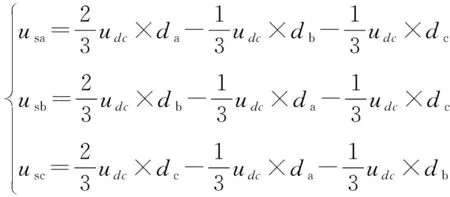
(5)
定子电压和定子电流经过3/2变换后可得得到usα、usβ、isα、isβ,从而计算出定子磁链:
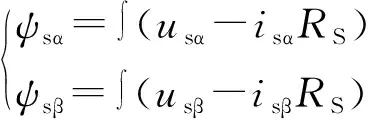
(6)
进一步可得发电机定子磁链的幅值和角度:

(7)
在由(6)式计算发电机的转子磁链时,需要对反电势交流信号进行积分运算,工程上通常采用一阶低通滤波器代替纯积分环节,其截止频率通常固定不变而发电机发电势信号是频率变化的交变信号,采用阶低通滤波器将造成发电机低速时磁链的幅值和相位偏移。为此,本采用工程化变频自适应磁链观测器器其结构如图3所示。
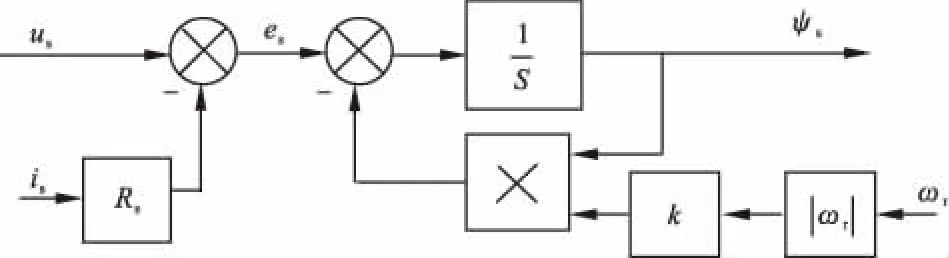
图3 变频自适应定子磁链观测器
图3中,k变频滤波增益,根据工程经验本文取0.1。其中发电机的电磁转矩指令可由可由最大功率追踪原理求得[4]:
(8)

4 网侧逆变器的控制
发电机侧变流器的主要为鼠笼异步发电机提供励磁和控制发电机电磁转矩使其满足“最佳转速-转矩曲线”使其捕获最大的风能。网侧逆变主要控制直流侧电容电压的稳定,并将发电机输出电能并入电网,并根据电网的调度指令调节功率因数。并网逆变器的性能也决定着全变速鼠笼异步发电机系统的性能。网侧变流器通常采用电网电压定向控制策略,以下从逆变数学模型分析其原理。
dq旋转坐标系的数学模型为:
(9)
式中igd、igq为三相逆变器电流在同步旋转dq坐标系的分量,ugd、ugq为电网电源在同步旋转dq坐标系的分量,sd、sq为开关信号在同步旋转dq坐标系的分量,ωg为同步旋转角速度,udo、uqo表示逆变器端口电压在dq坐标系的分量。
将并网逆变器电流在dq坐标系的d轴和电网电压矢量重合,q轴电流将滞后于d轴90°。定义电网电压矢量方向为有功方向,则在d轴分量igd为纯有功分量,q轴电流分量igd为纯有功分量。并有如下约束条件:

(10)
并网逆变器dq坐标系的数学模型(9)进一步可写成:

(11)
由瞬时功率理论得逆变器的瞬时有功、无功功率为:

(12)
将(10)代入上式,进一步可得瞬时功率的表达式为:
(13)

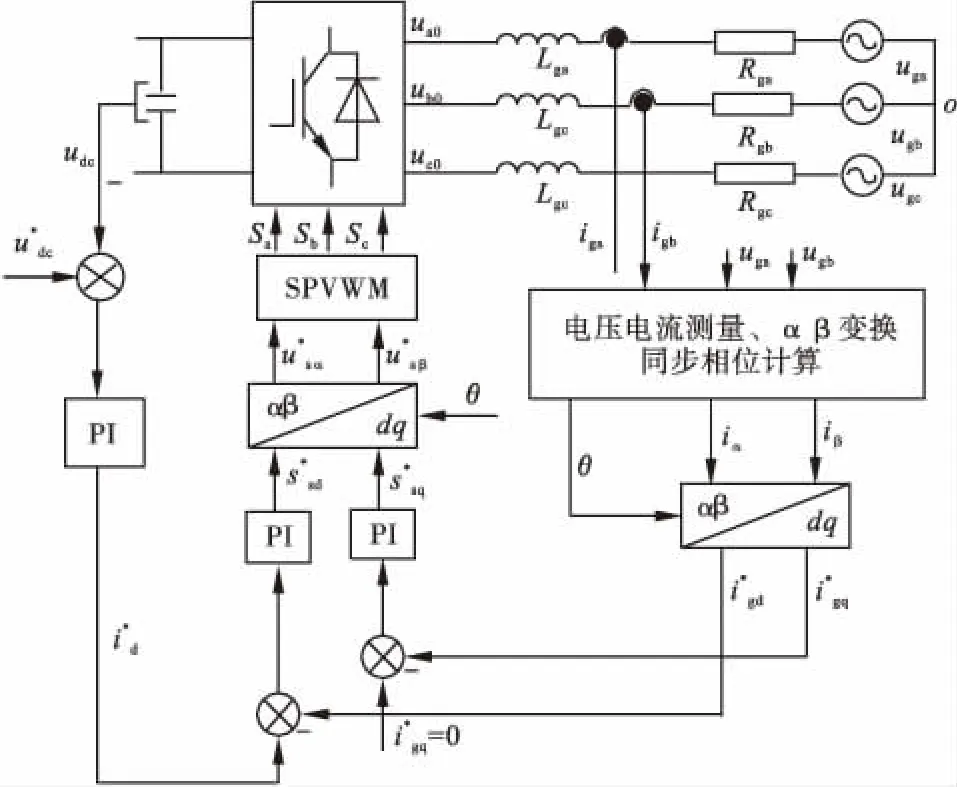
图4 网侧逆变控制框图
5 实验验证及分析
为验证控制策略的正确性与有效性在实验室搭建鼠笼异步风力发电机系统实验平台,用一台2.2kW的永磁同步电机及其驱动变频器系统模拟风力机拖动2.2kW的鼠笼异步发电机,由两台7.5kW的电压型变流器构成“背靠背”变流系统连接发电机与电网。其中两台变流器的控制器采用德国dSPACE公司生产的单板dSPACE1104快速原型控制器。并通过其D/A口将要观察的信号输出,用Textronix示波器记录波形。网侧逆变器直流侧电容取2000μF,并网逆变器的滤波电感取3mH。实验用鼠笼异步发电机参数如表1所示。
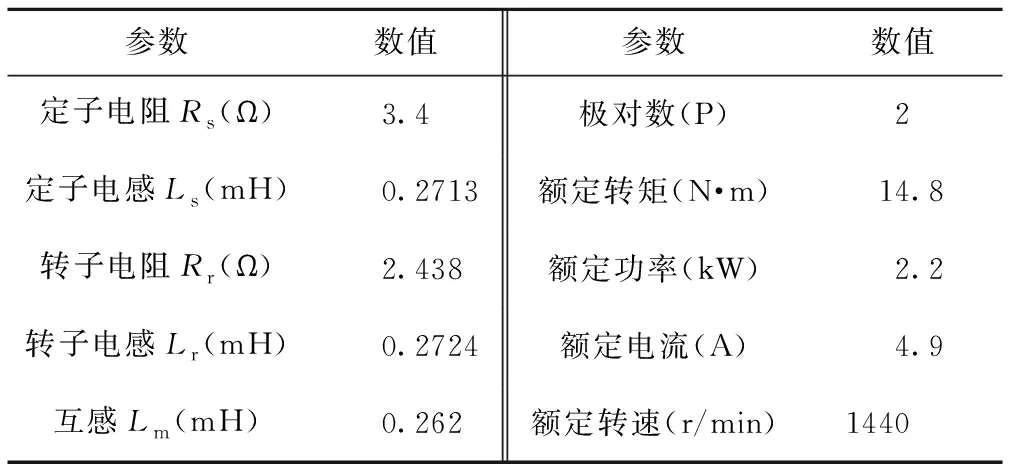
表1 笼异步发电机实验
调节模拟风力机的转速为550r/min,发电机定子磁链给定值设为0.65Wb,逆变器直流侧电压指令设置为100V。为了实验安全,并网逆变的输出经过隔离变压器和自耦调压器连接至电网,调节逆变器的端口线电压幅值为50V。并网运行稳态实验结果如图5所示,图5(a)发电机定子磁链幅值和发电机定子a相电流的实验波形,可知稳态时发电机定子磁链稳定在给定值0.65Wb,且定子电流波形的正弦度较好。图5(b)为电网侧逆变器稳态时的直流侧电压、相电压、相电流的实验波形,由可知稳态运行时直流侧电压稳定在给定值100V。由于网侧变流器电流传感器按整流器方向整定,即电流流进变流器为正方向,由图可知相电压与相电流方向,说明变流器工作于逆变状态,且处于单位功率因数状态。

图5 并网运行稳态实验波形
为进一步验证所提控制策略的动态响应性能,调节发电机的转速观察系统的动态响应速度。图6(a)电机转速由550r/min调节至630r/min,并保持发电机定子磁链给定值为0.65Wb时,发电机定子a相电流和转子磁链幅值波形,由图可知增加发电机转速时,发电机定子磁链稳定在给定值,由于转速增加使得发电机输出电能增加,由图可知发电机定子电流也随之增加。图6(b)发电机转速时,电网侧逆变器的实验直流电压和相电流的实验波形,由图可知增加发电机的转速时,直流侧电压出现短暂的泵升之后稳定在给定值100V,逆变器的并网电流也随之增大,说明发电机向电网输送的电能增大。图6(c)和6(d)为将发电机转速由630r/min调节至550r/min时发电机侧变流器实验波形,可知减小发电机转速时,发电机定子电流和并网逆变器电流也随之减小,发电机系统并网功率减小,而发电机的定子磁链幅值和直流侧电压都稳定在给定值。通过发电机加减速实验,进一步验证了本文所提控制策略有较好的动态性能。
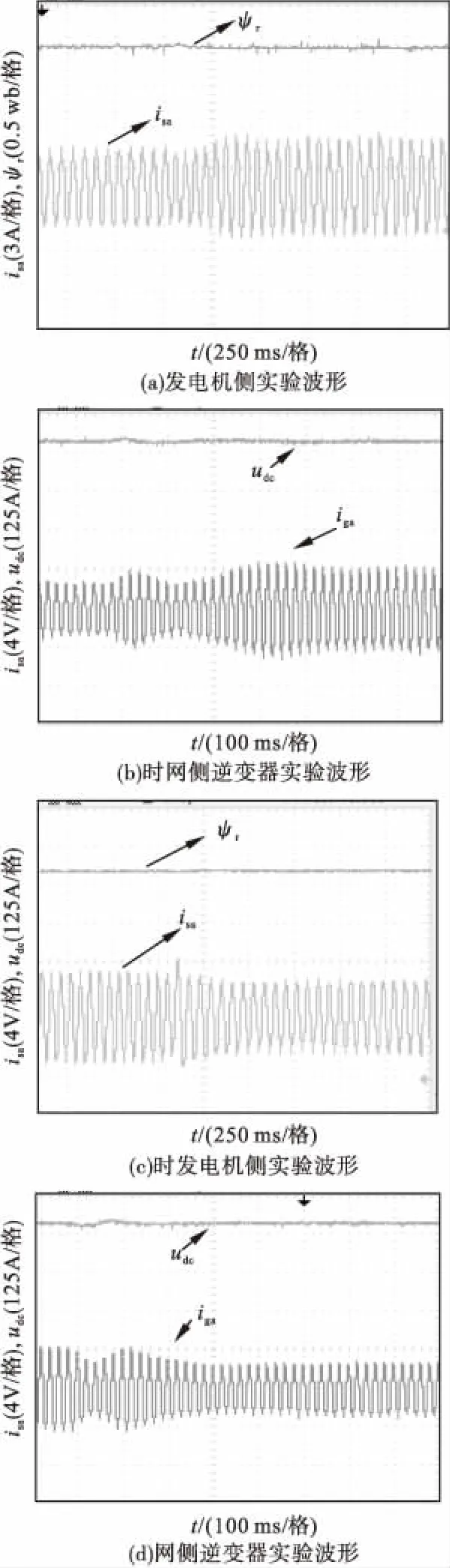
图6 并网运行动态实验波形
6 结论
本文针对全变鼠笼异步风力发电系统,提出了发电机侧变流器基于SVPWM的鼠笼异步发电机直接转矩控制策略,此控制方法相比与传统矢量控制减小控制对于发电机参数的依赖性,直接转矩控制策略仅需发电机定子电阻参数,增强了系统的鲁棒性;相比于基于开关表和滞环比较器的直接转矩控制,本文采用SVPWM技术减小发电磁链和转矩的脉动。并详细分析了网侧逆变基于电网电压矢量定向控制原理。最后,在实验搭建实验平台,验证本文所提控制策略,分别针对全变鼠笼异步风力发电系统的稳态运行实验和改变发电机转速的动态实验验证了所提控制策略的正确性与有效性。
猜你喜欢
防爆电机(2022年1期)2022-02-16
山东工业技术(2016年15期)2016-12-01
电测与仪表(2016年8期)2016-04-15
电测与仪表(2016年10期)2016-04-12
通信电源技术(2016年4期)2016-04-04
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2015年16期)2015-04-12
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年19期)2014-04-04
电测与仪表(2014年11期)2014-04-04
