4-SPS(PS)并联机构模糊自适应滑模控制系统设计
2018-12-18 01:15叶双双黄鹏鹏黄武良
机械设计与制造 2018年12期
叶双双,黄鹏鹏,黄武良
(江西理工大学 机电工程学院,江西 赣州 341000)
1 引言
少自由度(自由度小于6)的并联机构(Parallel Mechanism,PM)具有构型简单易实现、不受工作空间的限制、驱动原件少、造价低等优点,因而学者们对少自由度并联机构的研究越来越广泛[1]。控制策略研究作为少自由度并联机构研究的重要领域,但由于并联机构的时变性、非线性和不确定性等特点,运用传统的控制方式难以达到预期的控制效果,采用智能控制策略与传统控制方式相结合的方法逐渐成为解决这类问题的有效途径[2]。文献[3]以并联机床为研究对象,提出了一种双自适应模糊滑模控制算法,解决了系统动态性能不对称、系统精度低、稳定性差等问题。文献[4]针对非完整移动机器人,设计了一种基于自适应模糊滑模动力学控制的混合控制算法,控制器实现了平滑的速度输出,消除了移动机器人的跟踪误差。文献[5]针对液压驱动单元的三自由度机器人,提出了一种基于指数趋近律的SMC控制算法与模糊控制算法相结合的控制方式,仿真结果表明该模糊滑模变结构控制可以改善系统的动态品质以及提高系统的稳态精度。文献[6]基于柔性关节机器人,设计了一种前馈补偿和模糊滑模相结合的控制器,并对其进行了实验分析,结果表明该控制器的鲁棒性较强,响应速度快。为改善并联机构的轨迹跟踪精度性能,基于模糊自适应(Fuzzy-Adaptive)控制算法,提出了一种以4-SPS(PS)并联机构为研究对象的SMC控制设计方案,并对机构的运动特性进行了分析,建立了机构的模型和动力学方程,研究了机构在模糊自适应控制器下的轨迹跟踪曲线。
2 4-SPS(PS)并联机构模型
4-SPS(PS)并联机构的一条约束支链PS固定在定平台的中心以及四条驱动支链SPS均匀地对分布在机构四周。模型和结构简图分别,如图1、图2所示。机构的定平台和动平台由两个正方形组构成,动平台的几何中心和中心支链的一端成垂直固定约束,中心支链的另一端与定平台的几何中心通过球副S相连接,中心支链的两端间采用移动副P相连接。支链AiBi(i=1~4)的两连接端通过两个球副S分别与定平台和动平台相连接,两个球副S的中间采用移动副P作为驱动副。

图1 并联机构模型Fig.1 Parallel Mechanism Model
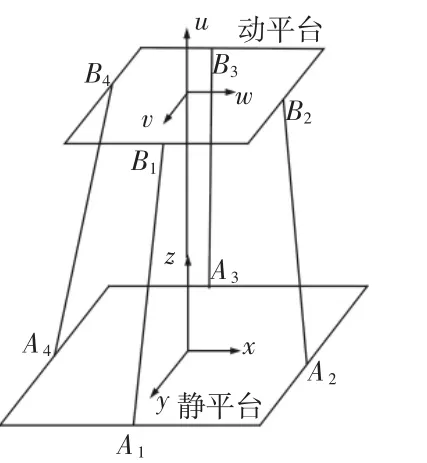
图2 并联机构简图Fig.2 Structure Diagram of Parallel Mechanism
由螺旋理论(Screw Theory)可知,A1B1支链的螺旋系统为:

式中:矢径 r=(0,0,z);可知 A1B1支链的反螺旋系阶数为 2,具体的形式如下:

由反螺旋理论(Anti-Screw Theory)可知,4-SPS(PS)并联机构的运动特性为沿x,y,z方向的三维转动和绕z轴方向的一维平移。
2.1 微运动法建立机构的运动学方程
对于多自由度的并联机构,可采用螺旋法求解其运动学方程。但对于少自由度的并联机构,螺旋法求解具有局限性,可采用微运动法建立机构的运动学方程,且可避免螺旋法解超越方程组的难题,得到的矩阵是非奇异方阵,可以直接作为并联机构仿真系统的理论参考输入值。微运动法的基本思想为:当机构转动的角度α,β,γ或者移动的距离dx,dy,dz较小时,下列等价形式成立:


式中:cα=cosα,sα=sinα;cβ,sβ,cγ,sγ 以此类推,下同。
变换矩阵形式为:

同理,与动平台铰接点A2、A3、A4变换后的坐标为:
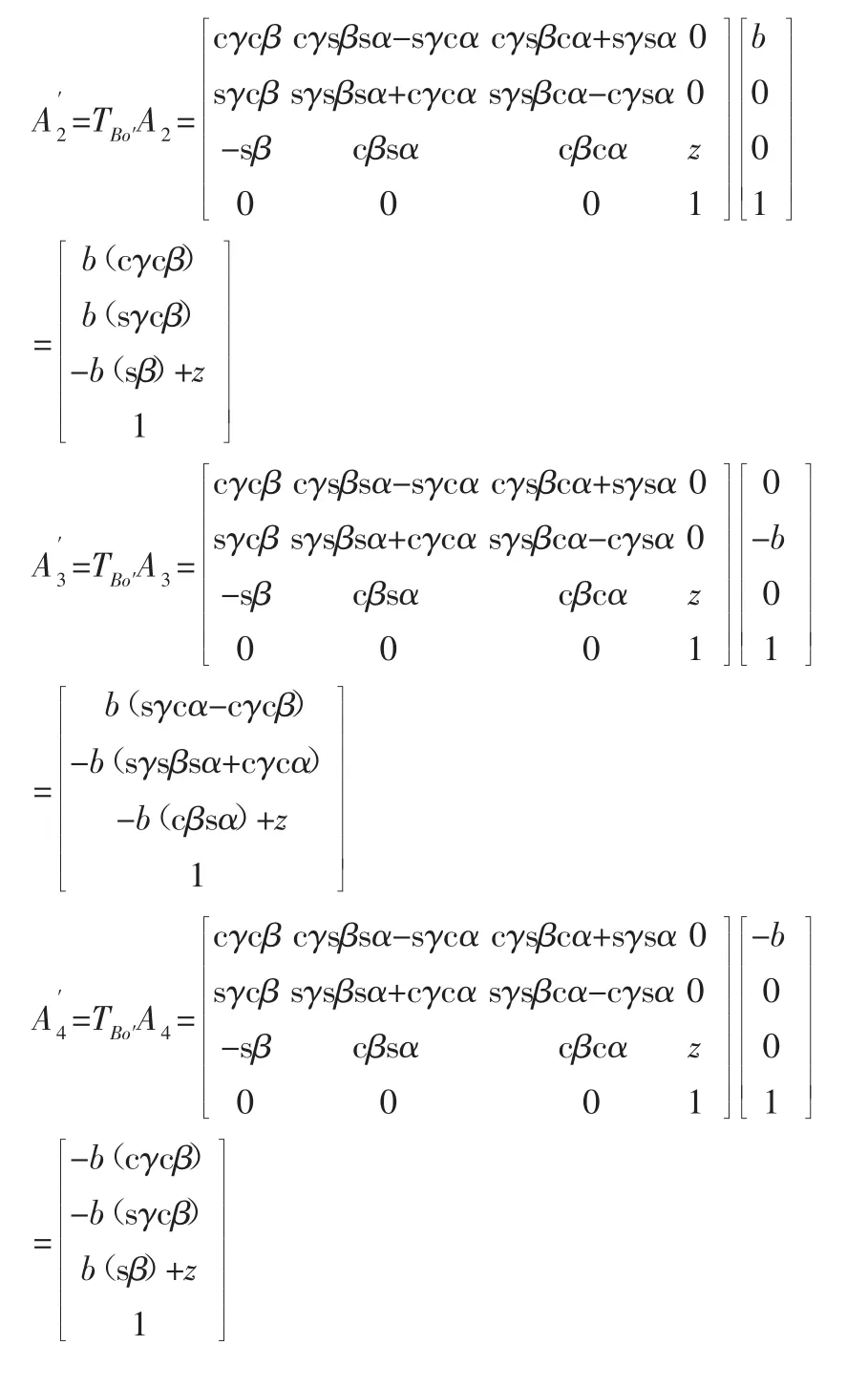
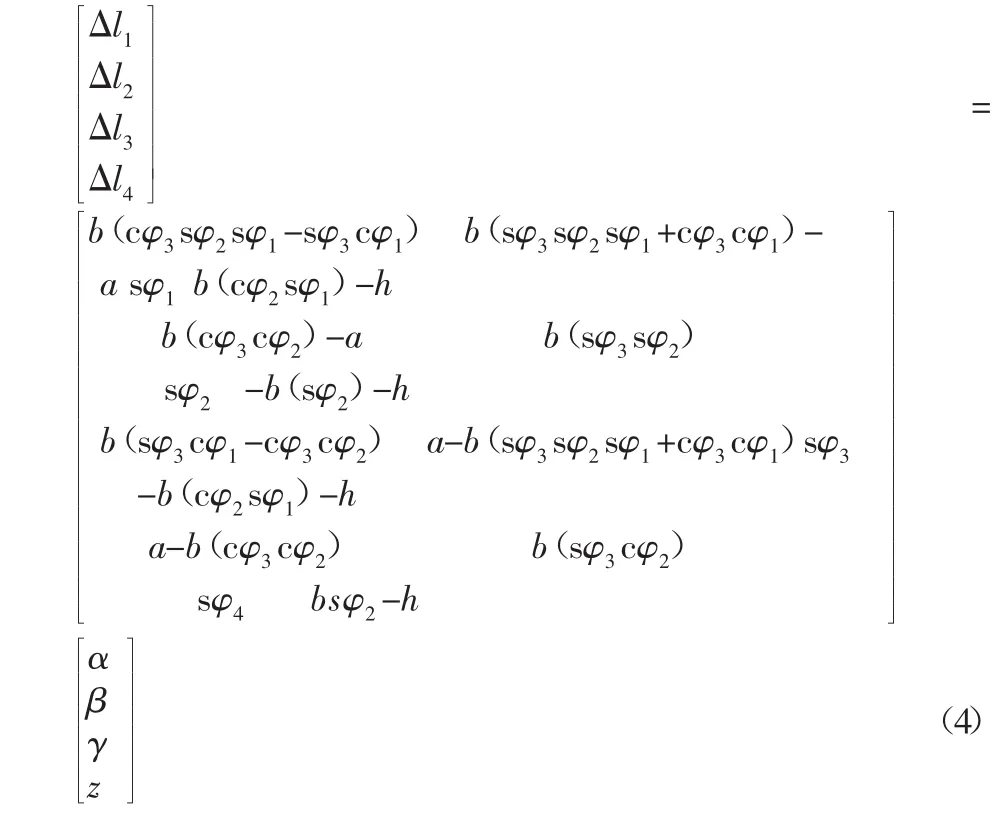
假设驱动支链P的初始长度为li(i=1~4),各支链P的伸展量为Δli(i=1~4),则有以下关系:

根据式(2)的等价表示方式,将机构的所有参数写入Matlab的m文件中,编写求解式(3)的程序。通过Matlab计算出各杆长的变化量,以得到Δli与α,β,γ,z之间的关系,即机构的运动学方程,如式(4)所示。
2.2 建立机构的动力学方程
根据拉格朗日(Lagrange)方程,采用独立坐标系法得到的4-SPS(PS)并联机构的动力学方程[7]为:

式中:q、q˙—机构的广义位移和广义速度;τ—驱动力矩向量;M(q)∈R4×4—机构的惯性矩阵;Vm(q,q˙)∈R4×4—离心力矩阵;F(q˙)∈R4—摩擦矩阵;G(q)∈R4—重力矩阵;τd∈R4-干扰矩。机构的动力学方程(式5)具有下列的基本特征:
(1)矩阵 M(q)-2Vm(q,q˙)是一个斜对称矩阵。(2)对于任意的矩阵 q 和q˙,M(q)是正定对称的,且 M(q)和 Vm(q,q˙)是一致有界的。(3)存在一个参数向量 p,使得 M(q)、Vm(q,q˙)、F(q˙)和 G(q)满足线性关系:
M(q)ω+Vm(q,q˙)ψ+F(q˙)+G(q)+τd=Φ(q,ω,ψ,q˙)Ω
在编写模糊自适应SMC控制器程序的过程中,需要利用上述特性。
3 控制系统的设计
3.1 控制系统框图
首先,借助SolidWorks软件优异的实体建模功能,来建立4-SPS(PS)并联机构的三维模型;然后,通过SimMechanics Link插件,将建立的三维模型转换成Matlab/SimMechanics模型;最后,添加相应的检测和驱动模块,即可建立4-SPS(PS)并联机构的控制系统框图,如图3所示。其中,Subsystem模块的主要作用是根据式(4)的运动学方程和输入的期望轨迹,来计算各杆长的变化量,为机构提供参考输入值。Controller为系统的控制器,Subsystem3表示系统的被控对象式(5)的动力学方程;Scope1至Scope5表示示波器,分别显示动平台的位置、速度、加速度和差值变化的输出曲线,主要参考位置的输出曲线;Body Sensor是动平台的传感器。
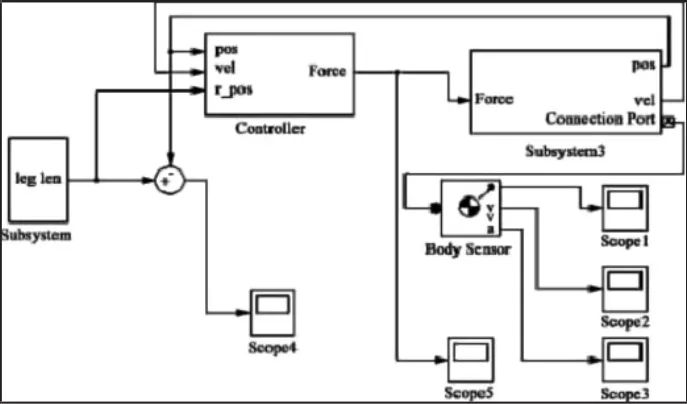
图3 控制系统框图Fig.3 Block Diagram of Control System
3.2 控制器的设计
3.2.1 传统的SMC控制器
滑模变结构控制从本质上看是一种特殊的非线性控制策略,其可以在系统的动态过程中,不断地调整系统的运动状态,迫使系统按照预定滑模状态轨迹运动。设计SMC控制器主要是设计切换函数s(x)和滑模控制律u(x)两大任务。传统切换函数的表达式为

式中:e—系统误差,C=diag(C1,…,Cn),Ci>0。
幂次趋近律是一种常用的趋近律,其表达式如下:

式中:k>0,0<α<1。当系统的运动状态远离滑模面时,趋近速度较小,可通过增大α值来提高趋近速度,缩短趋近时间;当系统的运动状态靠近滑模面时,趋近速度较大,可通过减小α值来降低趋近速度,有利于削弱抖振。
3.2.2 模糊自适应(Fuzzy-Adaptive SMC)控制器
对于传统的SMC控制器,幂次趋近律中的参数α和切换函数中的参数C常常设定为特定的常值矩阵或者常数。因此,对于柔性串联机械臂这种复杂的非线性系统,往往不能达到预期理想的控制效果。模糊自适应滑模变结构控制器通过模糊自适应算法,对SMC控制器的参数C和参数α进行在线实时修正,以提高系统的轨迹跟踪精度。模糊自适应滑模变结构控制器的示意图,如图4所示。

图4 模糊自适应SMC控制器示意图Fig.4 Schematic Diagram of Fuzzy-Adaptive SMC
表1 的控制规律表Tab.1 Control Regularity Table of

表1 的控制规律表Tab.1 Control Regularity Table of
?
表2 的控制规律表Tab.2 Control Regularity Table of

表2 的控制规律表Tab.2 Control Regularity Table of
?
4 仿真分析和实验研究
假设机构理想输入信号的表达式分别为:α=β=0.3sin(6πt),γ=-0.3sin(6πt),z=3+0.3sin(6πt)。将理想输入信号和机构的运动学方程式(4)输入至图3的Subsystem模块中。设定机构的初始参数:动平台的质量为1kg,转动惯量 Ixx=11.7kg·m2,Ivv=11.8kg·m2,Izz=20.1kg·m2,φ1=φ2=φ3=60°,m=50mm,n=100mm,l=120mm。不断调整控制器的参数,调整至输出曲线运动平稳且无明显抖动时,在Matlab的命令窗口中输入Plot命令,绘制出Scope中的图形,并与期望曲线进行对比,得到机构各方向的理论输入曲线和实际输出曲线的对比结果,如图5~图7所示。

图5 α、β方向理想输入与实际输出仿真对比图Fig.5 Ideal Input and Actual Output Simulation Comparison Diagram of Direction α、β

图6 γ方向理想输入与实际输出仿真对比图Fig.6 Ideal Input and Actual Output Simulation Comparison Diagram of Directionγ
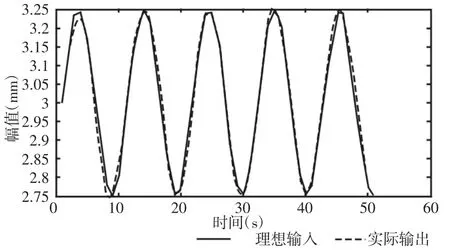
图7 z方向理想输入与实际输出仿真对比图Fig.7 Ideal Input and Actual Output Simulation Comparison Diagram of Direction z
为了更好的验证模糊滑模控制算法的有效性,搭建了4-SPS(PS)的实验平台,如图8所示。实验测试系统主要由软件和硬件组成。硬件部分主要包括4-SPS(PS)并联机构、控制器、压电陶瓷驱动器、双频激光干涉仪、工控机等,整个测试系统安装在气浮隔振平台上,以减小外界噪声、振动等因素对实验的影响。软件部分主要包括某公司的压电陶瓷驱动器控制软件以及某公司的双频激光干涉仪动态位移输入和输出检测软件。将模糊自适应滑模算法的程序输入至压电陶瓷驱动器的控制软件XE14158中,在激光干涉仪动态位移输入和输出检测软件LaserXL中输入期望的动平台运动轨迹。设置实验时间为10s,并通过双频激光干涉仪检测动平台的实际运动轨迹,通过Capture软件显示机构动平台的期望运动轨迹和实际运动轨迹,如图9所示。

图8 系统实验平台框图Fig.8 Block Diagram of Experiment Platform

图9 动平台的轨迹跟踪曲线Fig.9 Trajectory Tracking Curve of Moving Platform
由图5~图7可知,机构各方向的实际输出曲线与理论输入曲线的重合度很高。由图9可知,在1s的短时间内,机构动平台的运动轨迹出现了一定的波动,但随着模糊自适应滑模算法的进行,机构在1s后的时间里运动趋于稳定,无明显的抖振现象,动平台的实际运动轨迹与期望运动轨迹几乎重合。以上说明模糊自适应滑模变结构控制器可以使机构获得较高的轨迹跟踪精度,较强的鲁棒性和较小的稳态误差。
5 总结
采用微位移法(Micro-Motion Method)求解出 4-SPS(PS)并联机构的运动学方程,以及运用拉格朗日法得到了机构的动力学方程,为机构的控制仿真提供了参考输入和控制对象。结合机构的动力学方程,设计了一种基于模糊自适应算法的新型滑模控制器,在此基础上,对该控制器进行了仿真分析和实验研究。结果表明:该模糊自适应滑模SMC控制器可以达到并联机构轨迹跟踪精度的要求,且具有鲁棒性强和稳态误差小等优点,为并联机构控制策略的研究提供了一种参考方案。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
中国惯性技术学报(2019年6期)2019-03-04
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
北京航空航天大学学报(2016年4期)2016-02-27
北京航空航天大学学报(2014年1期)2014-12-19
中国机械工程(2012年15期)2012-07-25