EtherCAT技术在振动台三台阵同步运动控制应用
2018-12-18 01:15王少甲高荣慧
机械设计与制造 2018年12期
王少甲 ,高荣慧 ,翟 华 ,,庞 健
(1.合肥工业大学 机械与汽车工程学院,安徽 合肥 230009;2.合肥工业大学 工业与装备技术研究院,安徽 合肥 230009)
1 引言
地震模拟振动台可以相对准确反映地震过程并实施人工地震波实验,是在实验室中研究结构抗震和破坏机制中最直接有效的方式[1]。考虑到振动台台面以及结构承重的局限性,通常只能做缩尺实验,要求模型和原结构之间符合动力相似性条件[2]。随着实际工程试验中对环境变量的要求越来越复杂,震动控制策略研究越来越深入,尤其是在大型结构抗震研究中,振动台尺寸也不可能制作无限过大,单一的地震模拟振动台逐渐无法达到要求,由多台振动台组合而成的多台阵显得更为灵活和适合。当把大型台阵变为单振动台使用时,必须实现台阵中各振动台的运动同步。
目前来看,基于PC的控制系统在工控领域成为趋势。PC-based控制技术就是把具有实时处理能力的控制软件安装在PC操作系统中,使其变为实时控制器。拓展的PC机完全代替PLC、NC/CNC那些大型的控制设备,变成了控制中心,同时也成为了通讯的枢纽,可完成任务的实时控制、通讯、监控和网络等多种功能。它具有高速、高计算能力、高可靠性、使用方便以及硬件选择灵活、兼容性好等各种优点。德国BECKHOFF公司的TwinCAT就是使用以上技术的软控制器产品。同时实时以太网具有以太网的优点和工业自动化技术的实时精确性,具有强大的数据处理能力和高效的确定通信协议,对实时性和精确性要求极高的各种工业控制环境极其适用,实时以太网技术已经成为工业控制技术发展的趋势[3]。
2 控制系统
2.1 控制系统原理及特征
EtherCAT不仅有高速和在处理高数据时有高效率等特性,而且布线可以灵活操作,它采取主从式网络布局,可以灵活选择网络拓扑结构。
EtherCAT主站同时负责和从站的通信以及主从网络管理和数据读取控制的布置。伺服驱动器从站具有两个方面的功能,一方面是通讯作用,包括和主站系统的通讯以及和其他从站的通讯;另一方面是关于控制伺服系统和获取其反馈数据的[4]。在主站中通过对系统管理器(TwinCATSystem Manager)对从站进行读取和配置,组建主站与从站之间的关系。主站和从站的通讯过程:从站软件接通电源进入初始化与主站形成通信,并完成寄存器的重置等。然后进入任务运行的周期阶段,从站会从EtherCAT网络上获取控制命令,发送给驱动器处理相关的指令,之后从驱动器获取反馈信息并把反馈回来的信息送回主站的控制器。
下行报文由主站发送给第一个连接的从站,再传送给下一级从站,最后由最后连接的从站发回处理完的报文至第一从站,然后发送回主站,各从站可直接处理报文。整个过程展现EtherCAT的独立、双全工特点,读写数据过程一般只有纳秒级延时。
2.2 EtherCAT分布式时钟
从站要有专用的从站控制芯片ESC(EtherCATslavecontroller),分布式时钟 DC(Distributed clock)存在于 ESC 中。分布时钟的同步机制是使所有的设备同步与主站连接的第一个DC从站,该从站作为主站和其他从站的参考时钟。所有设备具有相同的系统时间,在各设备在同一时间接收到同步信号时,控制各设备的任务同步的执行。
EtherCAT的DC理论是基于IEEE1588时钟同步协议,并在此基础上添加了时钟同步算法进行改进。EtherCAT时钟同步算法主要包括:测量传输延时并对初始时钟的偏移进行计算,对时钟的同步补偿和动态补偿[5]。
在周期性数据通讯模式把从站设备模式设置为同步与分布式时钟同步事件,本地周期触发由SYNC事件触发完成。分布式时钟产生两个同步信号SYNC0和SYNC1,用于底层应用的中断控制或触发数字量的输入输出。
分布式时钟功能通过读取ESC寄存器来实现,当寄存器中有数据写入时,发出中断信号通知控制器,此过程中应把过程数据位置对应的ESC中断控制寄存器地址为(0X0204-0X0207)设置为映射状态,驱动控制器以SPI协议读取ESC输出的数据并处理,发送脉冲控制信号对伺服电动机进行控制。
2.3 系统的控制策略
系统为全数字伺服系统,控制原理,如图1所示。
振动台的开环系统传递函数可用式(1)表示:

式中:ωh—系统固有频率;ζh—系统的阻尼系数;kv—系统的开环增益[6]。

图1 三环伺服控制原理Fig.1 The Principle of Three Ring Servo Control
在闭环系统中引入三参量反馈因子后的控制原理图,如图2所示。

图2 三参量反馈控制原理图Fig.2 Three-Variable Control Schematic Diagram
引入三参量反馈后系统的闭环传递函数为:

式中:kdf—位移的反馈增益;kvf—速度反馈增益;kaf—加速度反馈增益。
由以上可见,增大kvf可以增加系统的固有频率,增大kaf可以增加系统的阻尼比。
系统采用位置控制、速度控制和力矩/电流控制的三环结构,在保持系统稳定的前提下,提高了系统阻尼比和共振频率,从而扩宽了系统的频率使用范围[6]。在每个控制环引入了PID调节,使系统更加准确稳定达到控制效果。
TwinCAT经过TwinCATNC的中转来控制伺服驱动器。伺服轴在每个NC运行周期到达目标设定的位置,按照轴的差异及对应的参数设置,得出输出变量的值发送给驱动器。如果驱动器工作在位置模式,那NC只是每个周期提供位置设定值(Pset)给驱动器,三个控制环的PID均由驱动器完成;如果驱动器工作在速度模式,那NC每个周期提供速度设定值(Vset)给驱动器,Vset是NC根据目标位置速度值及实时反馈的位置速度值经过PID后得出的值,这个过程是由NC内部自动完成。
3 伺服运动系统设计
3.1 机械系统设计
台阵由相同的3台相同的振动台平行排列组成,每台振动台皆具有X-Y轴两自由度,如图3、图4所示。
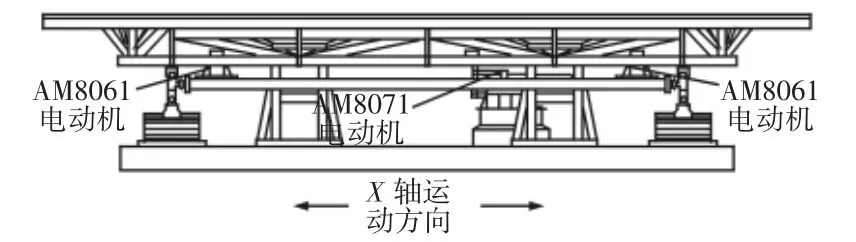
图3 振动台三台阵右视图Fig.3 Three Shaking Table Array in the Right View

图4 振动台三台阵主视图Fig.4 Three Shaking Table Array in the Main View
其中X轴方向运动由一台倍福公司型号为AM8071同步伺服电动机连接滚珠丝杠完成,Y轴方向运动由两台型号为AM8061同步伺服电动机连接滚珠丝杠共同驱动。通过三台振动台在X轴、Y轴的同步运动最终合成台阵所需要的运动方式。
3.2 系统平台的总体结构
本实验系统网络的通讯方式为直接通讯模式。直接模式是一个串行网络,主站设备直接与从站相连,从站再与下一个从站相连,数据帧一级一级向后发送。
伺服控制系统的EtherCAT主站由某公司CX5130嵌入式控制器和TwinCAT工控软件来担任,从站包括3个AX5118单通道伺服驱动器和3个AX5206双通道伺服驱动器。其中每个AX5118伺服驱动器控制一个独立的振动台X轴同步伺服电机,每个AX5206伺服驱动器控制单个振动台Y轴方向运动的两个同步伺服电机。
各伺服驱动器与对应的伺服同步电机连接后最终完成整个三台阵伺服同步控制系统的搭建示意图,如图5所示。
在各伺服驱动器内部封装有EtherCAT通讯模块,能够实现主从站以及从站与从站间的通讯。从站完成网络上的数据传输以及读取和反馈运动系统的编码器的位置信号、速度信号和转矩信号。利用一主站六站的网络布局,实现同步的动态命令传递以及获取反馈信息的目的,完成多轴之间高度运动同步[7]。

图5 伺服运动系统示意图Fig.5 Schematic Diagram of Servo Motion System
3.3 伺服运动控制系统软件设计
为了实现三台阵预先要求实现的动作,本软件程序主要控制三振动台X方向的3台永磁同步伺服电机同步运动和Y方向的6台永磁同步伺服电机同步运动。最终实现三台阵与各单台振动台运行方式一致。
Beckhoff公司的运动控制软件为TwinCATNCPTP,NCPTP即点对点运动控制。TwinCATNC是基于PC的纯软件的运动控制,它的功能与传统的运动控制模块、运动控制卡类似。由于TwinCATNC与PLC运行在同一个CPU上,运动控制和逻辑控制之间的数据交换更直接、快速,因此TwinCATNC比传统的运动控制器更加灵活和强大[8]。TwinCATNCPTP把一个电机的运动控制分为三层:PLC轴、NC轴和物理轴。PLC程序中定义的轴变量,叫做PLC轴。在NC配置界面定义的AXIS,叫做NC轴,在IO配置中扫描或者添加的运动执行和位置反馈的硬件,叫做物理轴。NC轴如果关联到物理轴,就是实轴,如果不关联到任何硬件,就是虚轴[9]。这里把3个X轴耦合到一个虚轴Axis_X_Master,6个Y轴耦合到一个虚轴Axis_Y_Master,通过控制两个虚轴的运动,实现三振动台的平稳的同步控制。
3.3.1 系统配置
通过编程PC对控制器进行配置,使控制器和各伺服驱动器处于同一网段。Twin CATSystemManager在Config Mode模式下,右击“I/O-Configuration”下的“I/ODevices”,选择“Scan Devices”查找本系统的I/O设备,扫描从站设备。在NC-configuration中可以找到所有的NC轴,并自定义添加两个虚轴Axis_X_Master和Axis_Y_Master,获取NC轴信息。在I/O-Configuration->I/O Devices->Device1(EtherCAT)中显示各驱动器中进行电源配置以及配置各通道的电机型号和反馈类型等。点击“Activate Configuration”激活配置,并保存生成.tsm格式的文件。
3.3.2 运动控制程序的开发
本运动系统控制程序的开发环境为TwinCATPLCControl。在TwinCATPLCControl中提供的编程语言符合IEC61131-3可编程序控制器编程语言国际标准的要求。
整个运动控制的流程如下:
定义一个二维数组,其中数组的每一行的4列元素分别代表设定X轴和Y轴运行的位置、速度、加速度、减速度数值,每一行四列的数组决定了振动台在这段距离内到达所设定位置的运动方式。通过依次不断地调用每一行数组,完成每段运动,即可把每段运动连接起来实现完成预定的运动。运动控制部分程序流程图,如图6所示。本振动台运动主要依靠MC_MoveAbsolute绝对运动功能块实现主轴的连续运动。主轴的运动参数(位置、速度、加速度、减速度数值),利用循环不断输入功能块中。
系统当检测到控制柜停止按钮或上位机停止或安全保护装置发出的信号时,各振动台就会立即停止运动:
bEdgeDOWN[1](CLK:=DI_Input[3].4);
bEdgeDOWN[2](CLK:=DI_Input[6].4);
bEdgeDOWN[3](CLK:=DI_Input[9].4);
(*下降沿检测器功能块输入参数设定*)
bEdgeUP[2](CLK:=bStop OR bEdgeDOWN[1].Q ORbEdgeDOWN
[2].QOR bEdgeDOWN[3].Q );
(*上升沿检测器功能块输入参数设定,检测到其中一个信号,输出
bEdgeUP[2].Q 为真 *)
IFbEdgeUP[2].Q THEN
stop1:=TRUE;
stop2:=TRUE;(*轴运动停止功能块参数输入*)
END_IF

图6 运动控制程序段流程图Fig.6 Section Flow Chart of Motion Control Program
4 系统同步性验证
为了验证系统各从站之间数据通讯的同步性和EtherCAT用于伺服系统的底层闭环控制效果,设计了基于EtherCAT技术的三台阵系统。搭建的振动台三台阵,如图7所示。

图7 地震模拟振动台三台阵Fig.7 The Combination of Three Earthquake Simulation Shaking Table
基于EtherCAT网络,搭建一主六从的伺服控制系统,本控制系统包括3套基本伺服系统电气控制柜。每台控制柜主要负责对应的振动台运动控制以及信息传递,两套控制柜嵌入式控制器CX5130位于首台伺服控制柜中,如图8所示。作为三台阵的运行保护装置,同步检测装置,如图9所示。装置两个底板分别安装在相邻两振动台台面下部,当检测到两振动台运行不同步时发出紧急停止运行信号。

图8 伺服控制柜Fig.8 Servo Control Cabinet

图9 同步检测装置Fig.9 The Synchronous Detection Device
4.1 同步信号测试及结果
从站通讯模式设置为分布式时钟同步,1号从站作为参考时钟,各从站按照设置的周期同步的输出中断信号,用示波器同时捕捉1号从站和3号从站发出的中断信号来检测各从站通讯的同步性。检测到的信号偏差,如图10所示。

图10 中断信号的示波器显示Fig.10 The Oscilloscope Display of Interrupt Signal
图中横坐标方向每格距离表示200ns,可以计算出两从站的输出信号存在60ns的偏差。显示出EtherCAT的各从站之间通讯同步性非常好。输出信号60ns的抖动,反映在高速运动中也不过只有μm级的误差。
4.2 振动台台阵运动同步性测试
运行试验台并执行40s运行程序后,使用TwinCAT自带的电子示波器Scope View观察运动轴的运动信息。
定义示波器视窗,添加各运动轴位置监视通道,在监视通→Acquisition→Change中选择输入NETID,并选择端口。在点击Reload Symbols后,显示出可以观察的轴的各种变量(包括运动轴的位置、速度、加速度、力矩、跟随误差等信息)。在这里为了观察各运动轴的同步运动状况,分别选择需要完全同步的三个振动台X轴的位置信息,如图11所示。

图11 运动轴的位置信息Fig.11 Position Information of Motion Axes
为了辨别轴的位置同步性,把三个轴的位置曲线同时在一张视图显示,图中叠加的曲线为各振动台X轴运动位置曲线,运动范围为(-100mm,100mm)。结果显示选定的各振动台X轴运动位置曲线均高度重合,并且在连续运行40s的过程中同步检测装置没有触发急停信号,完成了三振动台同步运动。
5 结束语
EtherCAT基于分布式时钟机制保证了设备通讯和任务控制信号的同步性;依托三参量反馈控制并在每个控制环使用PID调节,提高整个伺服运动控制的准确性。系统综合以上优势,反映在实际运动表现中各同步轴精确同步运行。基于实时超高速以太网EtherCAT技术设计出高性能的大型地震模拟振动台三台阵运动系统,给出完整的软硬件方案,完成了多台振动台精确同步运动。该系统通讯性能好、I/O响应速度快、系统软硬件集成度高,并能够承担起大型实时数据传递和多任务处理,EtherCAT技术非常适用于对响应快、同步性要求高的场合。
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19
廊坊师范学院学报(自然科学版)(2021年2期)2021-09-10
会计论坛(2020年2期)2020-08-14
中国水能及电气化(2019年10期)2019-11-07
机电信息(2018年36期)2018-12-21
组合机床与自动化加工技术(2017年1期)2017-02-15
电子制作(2017年23期)2017-02-02
医学研究杂志(2015年11期)2015-06-10
医学研究杂志(2015年11期)2015-06-10
振动工程学报(2015年1期)2015-03-01