
基于图像处理和最小二乘法的原子力显微镜光路自动调整方法
2018-12-17 07:32程利群曲英敏杨焕洲孙佰顺
长春理工大学学报(自然科学版) 2018年6期
程利群,曲英敏,杨焕洲,孙佰顺
(长春理工大学 国家纳米操纵与制造国际联合研究中心,长春 130022)
随着人们对纳米技术探知的程度越来越深入,原子力显微镜(Atomic Force Microscope,AFM),自1986年问世以来已成为观测和操纵纳米尺度物质的重要工具。由于其不受样品导电性的限制,应用领域非常广,涵盖物理学、化学、医学、生物学、微电子学、材料科学、微机械及微纳米技术等诸多领域[1-3]。近些年来在生物医学领域,特别是生物细胞等研究已取得很多重要的研究成果[4,5]。
AFM是依靠原子、分子之间相互作用力对微纳尺度物体进行成像的仪器,主要由微米尺度的微悬臂其下方带有曲率半径为纳米量级的探针、四象限光电探测器、激光器及压电陶瓷扫描器组成。其工作原理如下:激光光斑照射到探针上方的微悬臂,光斑经微悬臂反射到四象限探测器中心位置。当探针与被测样品接触时,会产生一个微小的作用力,使微悬臂产生偏移导致反射到四象限探测器的光斑偏离中心,控制压电陶瓷扫描器使反射到四象限的光斑保持在中心位置,并通过一定的成像方法即可计算得出样品的表面形貌[6]。
目前,AFM激光反射光路主要依靠手动调节[7],具体实施方法为:首先调整激光器或探针模组使激光光斑照射在微悬臂后方毫米级的反光片上,然后逐渐调整光斑位置使其照射在探针上方微悬臂区域,再调整四象限探测器使光斑反射到其中心位置,调节过程中可利用带有显微镜的CCD对光斑位置进行辅助观察。手动调节方法可操作性差、过程繁琐,每次更换探针时都需要重新调整光路,易使操作者眼睛疲劳甚至出现损伤的情况。
本文针对手动调整激光反射光路的不足,提出了基于图像处理和最小二乘的原子力显微镜光路自动调整方法。主要在自制原子力显微镜系统上进行开发,系统的探针架安装可通过计算机控制二维移动、位移精度为1μm的电机,并通过相关算法实现对原子力显微镜反射光路自动调整。
1 基于图像处理方法识别探针悬臂及激光光斑
1.1 自适应阈值法识别探针悬臂
由于CCD采集的探针悬臂图像并非复杂图像,图像信息中只含有微悬臂及样品或者是样品容器表面。因此为了提高图像处理的速度,将CCD采集的3通道24位图像转换为单通道8位图像,如式1所示。

式中,IR(x,y),IG(x,y),IB(x,y)分别为彩色图像的红绿蓝分量,I(x,y)为变换后的灰度值,(x,y)代表图像横纵坐标。
为了增加悬臂在图像中的对比度利用直方图增强算法,采用直方图修正过的图像可以使图像灰度分布均匀、细节清晰和边缘突出,从而达到目标增强的目的。原图像直方图k级灰度值Ik(x,y)经增强后为:

式中,ni为灰度值为i的像素个数,n为图像总像素值个数。并对增强后的图像数值取反由式(3)表示。

探针上方微悬臂形状不一,目前常见有三角形和矩形微悬臂。微悬臂在CCD采集的图像中对比度较高,可以采用阈值算法对其分割。但是当图像亮暗度有所变化时,固定阈值对并不能准确识别悬臂所有轮廓。因此本文采用自适应阈值算法对微悬臂进行分割,能针对不同亮度图像将其对比度高的区域识别出来,自适应阈值公式为[8]:

式中,ω0代表目标像素所占的比例,ω1代表背景像素所占的比例,μ0是目标像素的灰度均值,μ1是背景像素的灰度均值,μ是整个图像的灰度均值,σ2为类间方差。图像共有N个灰度级,在[0,N-1]内依次选取阈值T,使类间方差最大的值为最佳阈值。
最后采用连通域算法对分割后的目标图像像素点做标记,根据坐标将尺寸为100×100像素探针上方微悬臂区域标记出。
1.2 差分法识别激光光斑
本文采用图像差分法识别激光光斑,差分法检测目标时具有检测准确、能克服阈值法不能有效识别对比度低的目标和目标像素值低在图像中肉眼分辨不出等优点。
具体方法为:移动探针架电机至微悬臂后的反光片全部进入CCD视场,保存图像为I1,本方法移动距离为150μm。
打开激光器并保存光斑照射在反光片的图像I2。运用图像差分法I2减I1得到差分图像,并用自适应阈值算法对差分图像进行识别,得出光斑轮廓。根据阈值后的图像利用重心法计算光斑质心,重心法见式(5)和式(6):

式中,xc、yc代表x和y方向质心,I(x,y)代表图像(x,y)点像素值。最后以质心为中心在图像I2标出100×100像素光斑区域。
2 微悬臂移动距离与像素位置变化的最小二乘法拟合
由于系统装配和步进电机移动都含有一定的误差,静止标定CCD像素尺寸并不适合,本文采用最小二乘法对电机移动微悬臂的距离与其在CCD图像中像素坐标变化进行拟合[9]。具体步骤为:
(1)利用自适应阈值算法计算得出微悬臂区域最边缘点的横坐标并保存作为基准点X0。
(2)移动横向电机距离控制在100μm以内,利用步骤1得出横坐标X1和像素坐标的变化量ΔX0=|X0-X1|,同时也得到电机移动距离|Lx0|,以上全部为绝对值。
(3)重复步骤2得出多组对应关系式ΔX1=|X1-X2|、|Lx1|,ΔX2=|X2-X3|、|Lx2|……,利用最小二乘法拟合出图像像素变化与电机移动距离之间的关系式,如式(7):

式中,a,b为待求解系数,矩阵A为。
本文采集8组数据进行拟合。求Y方向的对应关系式,只需根据步骤1、2、3移动纵向电机得到纵向移动距离|LY0|、|LY1|、|LY2|……,和Y方向微悬臂像素变化量 ΔY0=|Y0-Y1|、ΔY1=|Y1-Y2|、ΔY2=|Y2-Y3|……,并利用公式(7)计算得出Y方向拟合系数a,b。
3 光路自动调整方法设计及结果
算法依托于实验室自制原子力显微镜开发,相对于传统原子力显微镜其探针架装有计算机可控、精度为1μm的步进电机,系统结构示意图如图1所示。CCD、四象限光电探测器、探针架的步进电机、压电陶瓷扫描器以及其下方的步进电机均由计算机控制并读取数据。
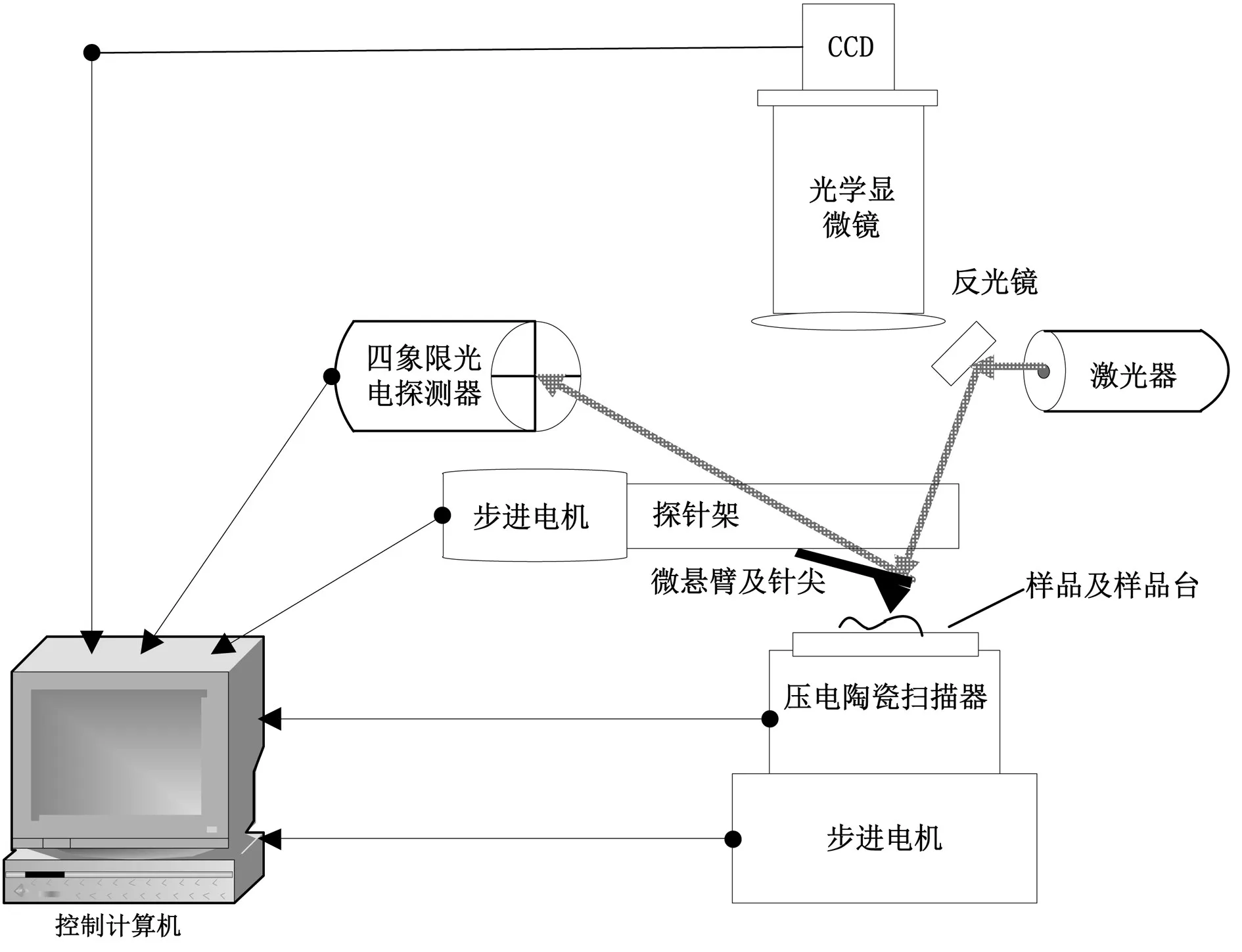
图1 系统结构示意图
光路自动调整方法流程由图2所示,具体步骤如下:
(1)系统装配,调节激光光路利用传统方法、调整带有CCD的显微镜到合适放大倍率,目的一是保证激光光斑和微悬臂在CCD视场内可见、二是在成像过程中能够观察到被测样品。本方法结合实验系统放大倍率固定到3倍。
(2)利用前文自适应阈值算法识别微悬臂。
(3)最小二乘法拟合电机移动距离与在CCD图像中像素位置变化之间的关系式。
(4)判断系统标定是否完成,完成则执行下一步。
(5)识别微悬臂。
(6)差分法识别激光光斑。
(7)通过最小二乘拟合的参数将微悬臂探针上方区域移动到光斑中心点位置。
系统标定过程就是执行步骤1、2、3,如果显微镜倍率和位置需要调整时,需重新标定,通常情况只需标定一次即可。算法每次执行时,只需执行步骤5、6、7。

图2 光路自动调整方法流程
自适应阈值识别探针微悬臂结果由图3和图4所示,图3是三角形悬臂,图4是矩形悬臂,都是目前常用的探针悬臂。从图3(b)、图4(b)可以看出自适应阈值算法可以准确将悬臂区域分割出来,连通域标记结果由图3(c)、图4(c)所示。最后通过连通域标记的悬臂边缘可以识别到探针上方微悬臂区域,最终结果由图3(d)、图4(d)所示。结果可以说明本文提出的自适应阈值算法能够准确分割不同形状的微悬臂,并通过连通域标记的点识别探针上方微悬臂区域。

图3 三角形悬臂识别结果
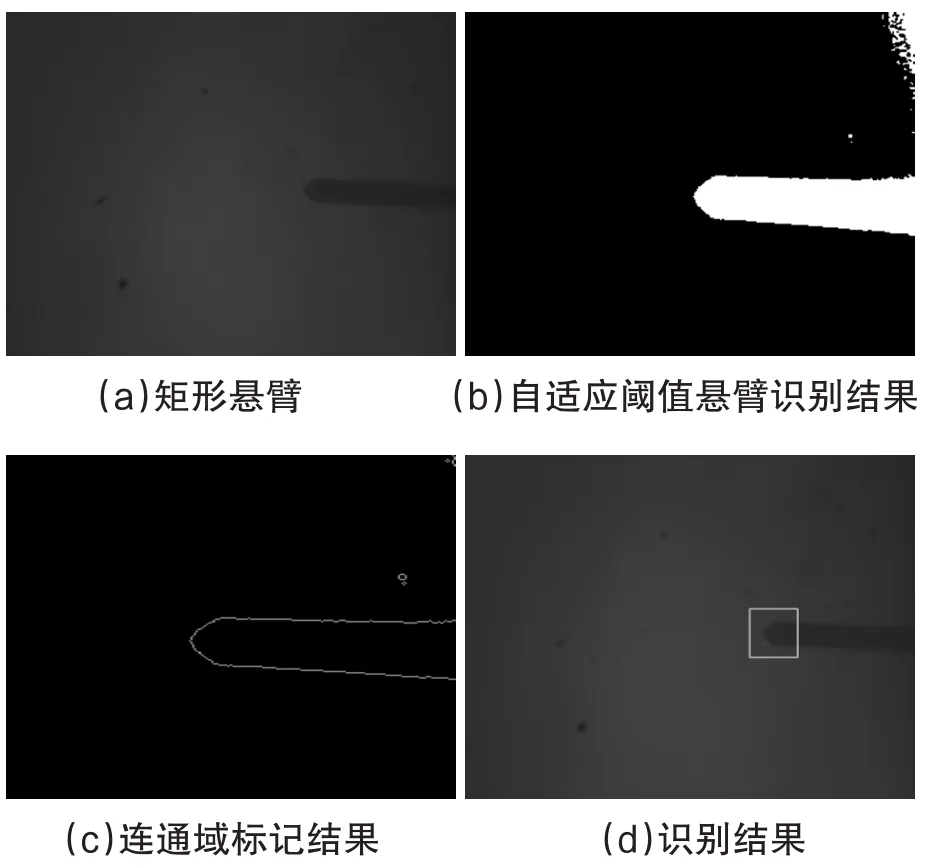
图4 矩形悬臂识别结果
激光光斑识别结果由图5所示,首先将微悬臂图像和微悬臂带有激光光斑图像进行灰度变换,结果分别由图5(a)、图5(b)所示。图像差分法图(b)减图(a)的结果经自适应阈值算法对光斑识别,结果由图5(c)所示。最后通过重心法标出光斑质心并标出光斑位置,图5(d)为光斑识别结果。
最小二乘拟合的微悬臂移动距离与像素变化的关系式由表1所示。ax、bx代表X轴横向线性拟合参数a、b,ay、by代表Y轴纵向线性拟合参数a、b。相同条件连续拟合5次,标准差由ax至by分别为:0.00208、0.00043、0.00211、0.00345,由此可以看出利用最小二乘法拟合悬臂移动距离与像素变化得到的结果比较稳定。

图5 激光光斑识别过程

表1 图像像素与微米电机移动距离最小二乘拟合关系式
图6给出了步骤7探针上方悬臂移动至光斑位置的过程。图6(d)为过程1,确定了微悬臂位置。图6(i)是过程12探针上方微悬臂已移动到了光斑中心位置。过程1至12是微悬臂由右向左,由上到下根据拟合参数ax、bx、ay、by将探针上方微悬臂移动至光斑中心的过程。图6可以看出本文提出的基于图像处理和最小二乘的原子力显微镜光路自动调整方法在激光光路自动调整中取得了较好的结果。
4 结论
本文针对传统手动调整AFM光路的不足,提出了一种基于图像处理和最小二乘的AFM光路自动调整方法。图像处理部分主要由自适应阈值算法识别探针微悬臂和差分法识别光斑,两种算法均取得了良好效果,其中自适应阈值算法可以准确识别目前市面常见的矩形悬臂和三角形悬臂。最小二乘法拟合微悬臂移动距离与其在CCD图像中像素距离变化的关系式系数ax、bx、ay、by结果稳定,同样条件下拟合5次,标准差分别为:0.00208、0.00043、0.00211和0.00345。结果表明所提出的光路自动调整方法在AFM光路调整过程中效果良好,在AFM系统的光路调整中具有重要的应用价值。

图6 激光光路自动调整过程
猜你喜欢
装备制造技术(2020年1期)2020-12-25
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
中国特种设备安全(2019年3期)2019-04-22
摄影之友(影像视觉)(2017年11期)2017-11-27
山东工业技术(2016年15期)2016-12-01
现代检验医学杂志(2016年3期)2016-11-15
凿岩机械气动工具(2016年2期)2016-11-11
中国医疗美容(2015年1期)2015-07-12
