
小区地下立体车库停车原理及结构设计
2018-12-13 02:35:40马兴灶弓满锋连海山殷华富
机电产品开发与创新 2018年6期
马兴灶,弓满锋,黄 赞,连海山,殷华富
(机电工程学院 岭南师范学院,广东 湛江 524048)
0 引言
随着社会的发展,人们生活水平不断提高,我国城市汽车保有量和人均拥有量不断的增加,目前,我国城市机动车辆的保有量与停车位之比大约为5:1[1]。以往那种单层平面停车场已经不能满足市场需求,而空间利用率高、操作简单可靠的立体车库成为解决这一问题的有效方法,特别是在城市小区。早在20世纪20年代,美国就展开立体车库研究,欧洲等发达国家也起步很早,而亚洲日本在20世纪60年代也开始这个领域的研究,而我国起步较晚,市场需求较大。近年来,国内外学者也开展了相关的立体车库的研究[2~6]。
1 总体方案及工作原理
1.1 设计方案
本文所设计的垂直升降式立体车库,适用于小区地下车库,其具体结构如图1所示,主要由车辆横移、车辆升降和地面旋转三个系统构成,其中车辆横移系统是通过控制液压机械手的动作来实现,车辆升降系统是通过控制电梯的升降来实现,而地面旋转系统是通过控制预埋于地下的方轴电机来实现,所有系统的动作由控制器(PLC)控制。
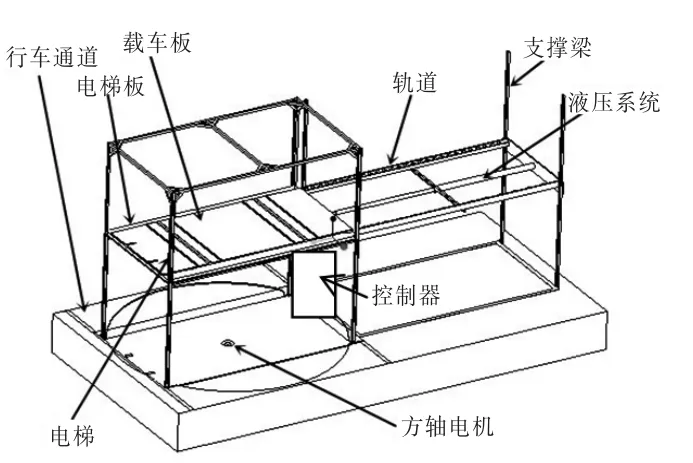
图1 车库总体结构Fig.1 Structure of garage
1.2 工作原理
本车库可根据地下车库的实际高度,设置不同的停车层数,而本文仅以两层的车库为例,存取车的具体流程如图2和图3所示。存车过程:(a)选择存车功能,选择存车平层,控制系统根据选择控制电梯到达指定平层;(b)横移系统启动液压机械手将载车板推出;(c)电梯搭载载车板到达地面平层;(d)与载车板配合的地下方轴电机启动,载车板旋转 90°;(e)车辆驶进载车板;(f)载车板复位;(g)上升至该停车平层;(h)横移系统将载车板拉回停车位置,见图2;取车过程:(a)选择取车功能,选择取车平层,控制系统根据选择控制电梯到达指定平层;(b)横移系统启动液压机械手将载车板推出;(c)电梯搭载载车板和车到达地面平层;(d)与载车板配合的地下方轴电机启动,载车板旋转90°;(e)车辆驶出载车板;(f)载车板复位,上升至原平层;(g)横移系统将载车板拉回原位;(h)电梯返回第二平层,方便底下车道通车,见图3。

图2 存车流程图Fig.2 Car parking flow chart

图3 取车流程图Fig.3 Car taking flow chart
2 关键结构设计
在国际上通用的车库设计标准中,车辆通道的宽度最小为4.5m,但大多数都取5m作为实际的使用标准,同时车库停车位的最小宽度为2.6m,最小的长度为5m,同时考虑到不同驾驶人员的不同的驾驶水平,因此在保证车辆能够比较容易的在停车库中进行停放,大多数的车库在设计的过程中都会在最小尺寸的基础上多加0.5m左右的尺寸,这样做的目的是便于驾驶人员进行快速地停车,参考文献[7],本设计取车库车辆通道宽度为5.3m,车库长度和宽度分别为5.3m和2.5m。
2.1 载车板
载车板的作用主要是在车辆被搬运的过程中承载车辆,其几何尺寸需要根据车库大小设计。载车板底部设计了一个向下凸出的配合装置,其外形是圆柱形,圆柱内有方孔。配合机构的作用有两点:①与地面平层预埋的方轴电机配合,实现载车板的地面平层转动;②与液压机械手配合,实现载车板的推拉。载车板的上表面设计有防滑线,主要作用是防止车辆发生滑动,防滑线可以有效地阻止车辆滑动,保证安全,载车板具体结构和视图如图4和图5所示。

图4 载车板结构Fig.4 Carriage structure

图5 载车板三视图Fig.5 Three view of vehicle plate
2.2 电梯板
电梯板其形状为U形,表面布有小滚球,焊有两块定位挡板,一端开了两个方孔。U型形状设计为载车板底部配合专门设计,使得电梯板不会阻碍载车板的平移;电梯板表面的钢珠主要起减少摩擦的作用,钢珠可以原地滚动,存取车时,载车板平移和地面转动,让载车板和电梯板之间由滑动摩擦变成了滚动摩擦,有效减少阻力。载车板的具体结构和视图如图6和图7所示。
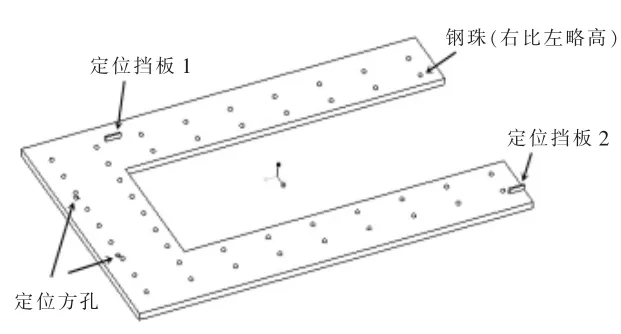
图6 电梯板结构Fig.6 Elevator p late structure

图7 电梯板视图Fig.7 View of elevator plate
2.3 定位装置
电梯板上的定位挡板和方孔,主要作用是定位载车板。保证载车板配合装置和方轴电机配合。电梯板底面需另外焊接两个相同的定位装置,由定位柱、弹簧和小杠杆组成,如图8所示。当电梯在空中时,定位柱穿过电梯板上的方孔向上凸出,载车板移动到电梯板时,定位槽与定位柱相配合,再结合电梯板上的两块定位挡板,限制载车板在电梯板上的转动、前后移动和向左移动,设计电梯板上的钢珠安装时右边部分比左边部分稍稍高 1~2°,利用重力作用,限制右移。当电梯板搭载载车板下降至地面平层时,地面平层设计有凸起部分,将装置的右边顶起,压缩弹簧,由杠杆原理可知,装置的左边会下降,定位柱顺着电梯板上的定位方孔下降,以免定位柱妨碍载车板转动。此时,方轴电机已和载车板配合实现定位了,所以不需要定位装置的定位了。当电梯上升时,与地面凸起部分分离,弹簧回复原长,会使定位装置复原。定位柱会顺着电梯板的方孔上升与载车板定位槽配合,定位载车板。载车板空中状态和定位装置状态变化如图9和图10所示。

图8 定位装置结构图Fig.8 Structure diagram of positioning device
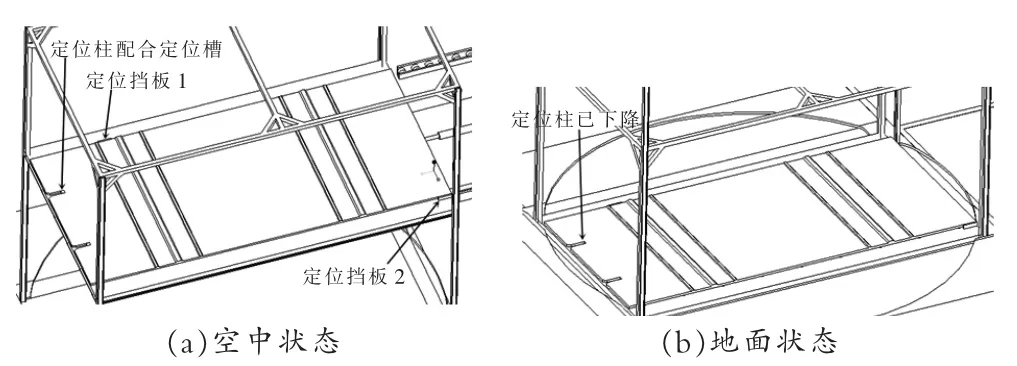
图9 载车板定位状态Fig.9 Carriage positioning state
2.4 液压机械手
液压机械手为载车板的横移提供动力,如图11所示;前端设计了一个以液压为动力的机械手,如图12所示,可以抓住载车板底部的配合装置,通过伸缩液压机械手来移动载车板。为满足液压机械手足够的伸缩长度和前端机械手单独动作,本文采用了多层嵌套的液压机械手,共两个液压缸,一个是用来控制液压机械手伸缩;另一个用来控制前端机械手动作。控制前端机械手的液压缸焊接在液压机械手最前部分,如图13所示,其液压控制回路如图14所示。两个液压缸作用的顺序不同,其实现的功能也不同,主要是根据是否要抓取载车板来区分。由PLC控制器控制两个液压缸的作用顺序,如图15所示。

图11 液压机械手结构Fig.11 Structure of hydraulicmanipulator
图12 机械手闭合状态Fig.12 Closed state ofmanipulator

图14 液压控制回路图Fig.14 Hydraulic control circuit diagram

图15 液压控制流程图Fig.15 Hydraulic control flow chart
前端机械手主要功能是抓取载车板底部配合装置,从而带动载车板的平移。机械手的张合也是通过液压系统来实现的,当液压机械手推出时,机械手张开,当液压机械手收缩时,机械手闭合。手指间应具有一定的开度,保证载车板底部配合装置能顺利地进入或脱开。机械手端部设计成“V”形面,以便机械手在推载车板的时候可以自动定心。此外机械手在工作的过程中会受到惯性力和振动的影响,要求有足够的强度和刚度以防弯曲变形,甚至折断。
3 结论与讨论
本文提出了一种升降横移式立体车库,阐述了该车库具体存车和取车的工作原理,并对其载车板、电梯板、定位装置和液压机械手等关键结构展开设计,实现了立体车库的基本功能。接下来将着手结构优化设计,并在这基础上搭建实体模型,开发车库控制系统设计,根据运用情况不断改进,争取设计出满足实际生产需求的车库。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
小猕猴智力画刊(2023年4期)2023-04-23 08:50:02
汽车实用技术(2022年6期)2022-04-02 06:25:48
今日自动化(2021年6期)2021-09-03 18:27:17
装备制造技术(2018年6期)2018-08-04 07:19:34
海外星云(2016年7期)2016-12-01 04:18:08
电子机械工程(2016年3期)2016-09-07 09:24:54
通信电源技术(2016年1期)2016-04-16 04:57:29
机电信息(2015年3期)2015-02-27 15:54:53
创业家(2015年6期)2015-02-27 07:53:36
