基于北斗卫星的海上定位解算方法的研究
2018-12-03 06:28:20包敬海
电子科技 2018年11期
刘 帅,包敬海
(钦州学院 电子与信息工程学院,广西 钦州 535011)
北斗卫星作为一种新的卫星通信方式,在移动网络无法覆盖的地区有着广泛的应用需求[1-2]。例如,大蚝养殖中的蚝排问题,利用北斗卫星海上定位功能,能够对蚝排位置进行有效定位。但目前海上水产养殖过程中使用的北斗卫星定位系统,定位精度低、设备昂贵,难以进行大规模的推广。
针对上述问题,本文将北斗定位和惯性定位相结合,设计了能够满足海上定位需求的北斗卫星信号接收系统,并对海上定位解算方法进行了研究。该系统使用有源阵列天线,能够对微弱的卫星信号进行放大处理。同时,系统采用基于最小二乘法的思想提出的海上定位解算方法,能够准确得到用户的位置、时间信息。研究内容对于提高北斗卫星的海上定位精度有着重要意义。
1 北斗卫星定位系统硬件设计
为了满足对海上定位的要求,北斗卫星定位系统在设计时,需要考虑的关键指标如下[3-5]:(1)接受频率为1 500.32±6 MHz;(2)接受通道≥16通道;(3)RNSS定位精度:水平5 m,高程5 m(重点区域,位置精度因子≤3);(4)测速精度:0.4 m/s;(5)定位数据输出>5次/s;基于上述考虑,北斗导航卫星接收机的整体框图,如图1所示。其中,主要包括有源天线阵列、多通道射频、基带模板以及用户显示界面。
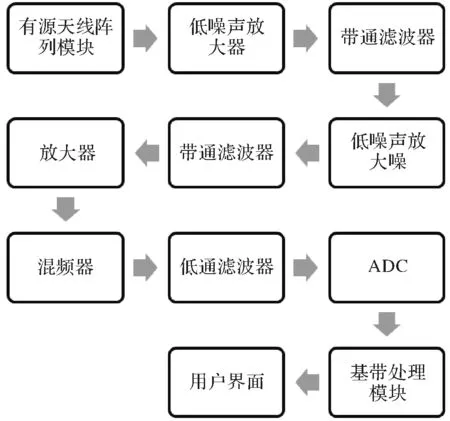
图1 系统整体框图
为保证海上定位的准确性,避免海风、暴雨以及其他干扰因素对北斗卫星海上定位的影响,系统中特意增加了有源阵列天线[6-7]。同时,天线接收到的北斗卫星信号经过低噪声前置放大器进行信号放大。然后,通过转化模块将放大后的信号转换为一般的射频电信号,从而保证了北斗卫星信号的可靠接收。按照上述内容,北斗卫星接收机的硬件设计,如图2所示。

图2 北斗卫星接收机硬件设计
基带通过天线阵列接收来自卫星的定位信号,并通过信号放大器对其进行放大。同时,将电磁波信号转变为射频信号。然后,由射频识别模块对有效信号进行识别、滤波、变频处理。当信号进入模数转化模块之后,接收到的模拟信号变为数字信号,再通过FPGA对北斗信号进行解算和定位,从而得到准确的海上位置信息。最后通过RS232通信接口,将解算后得到的位置、速度与时间信息传给用户。
2 海上定位解算方法
为了对海上坐标进行准确定位,本文对北斗卫星信号的定位解算方法进行研究。假设系统接收到了由m颗卫星得到的伪距观测量,根据伪距方程可以得到表达式[8-9]

(1)
式中,xu=[xu,yu,zu,b]为4个未知量。其中,[xu,yu,zu]为用户位置坐标,b为本地时钟和BDT时钟之间的差值。
由于方程(1)为非线性方程,在基带中为了对其计算,需要将其线性化。假设,接收机的初始变量为
x0=[x0,y0,z0,b0]
(2)
将式(1)按照泰勒级数展开
(3)
式(3)中h.o.t为高阶泰勒级数。定义为
(4)
其前3项为坐标方向dx的余弦矢量
dx=[(xu-x0),(yu-y0),(zu-z0),(b-b0)]
(5)
忽略式(3)中的高阶泰勒级数,则有
ρi(xu)-ρi(x0)=uidx0+npi
(6)
等号左侧为北斗卫星数据的伪距残差,等号右侧为线性化的伪距残差近似值[10-12]。对,m个观测量同时做线性化可得
δρ=Hdx0+np
(7)
式(7)按照数值计算的方法,可得其最小二乘解为
dx0(HTH)-1HTδp
(8)
(9)
矩阵(HTH)-1HT的前3行用来确定用户的位置坐标,第4行用来确定用户的时钟差。由上式可知,观测得到的公共误差项不会对用户的位置产生影响,但对用户的时钟差有影响[13-14]。因此,需要对其进行修正。修正后得到的解为
x1=x0+dx0
(10)
按照修正后的x值重新进行上述过程,对结果进行更新。对于第k次迭代,有
(11)
xk=xk-1+dxk-1
(12)
为了对迭代次数进行限制,求解约束条件为[15-16]
‖dxk‖<阈值
(13)
通过用户对阈值的设定,可以使迭代停止。通常,迭代次数越多,求解得到的精度越高,但其代价是运算时间增加。故一般而言,选择一个合适的阈值,不仅能够满足求解精度的要求,同时还能满足快速响应的要求[17]。
3 北斗定位系统软件设计
基于北斗卫星的海上定位程序在DSP(OPLAL138)中运行,使用C语言进行开发,其程序流程图如图3所示。系统启动之后首先对FPGA进行初始化,然后由DSP从Flash内部读取程序并完成初始化工作。DSP自身完成初始化之后,需要对与其连接的外部硬件设备初始化。其中,包括通信接口、模数转换以及显示等内容的初始化工作。
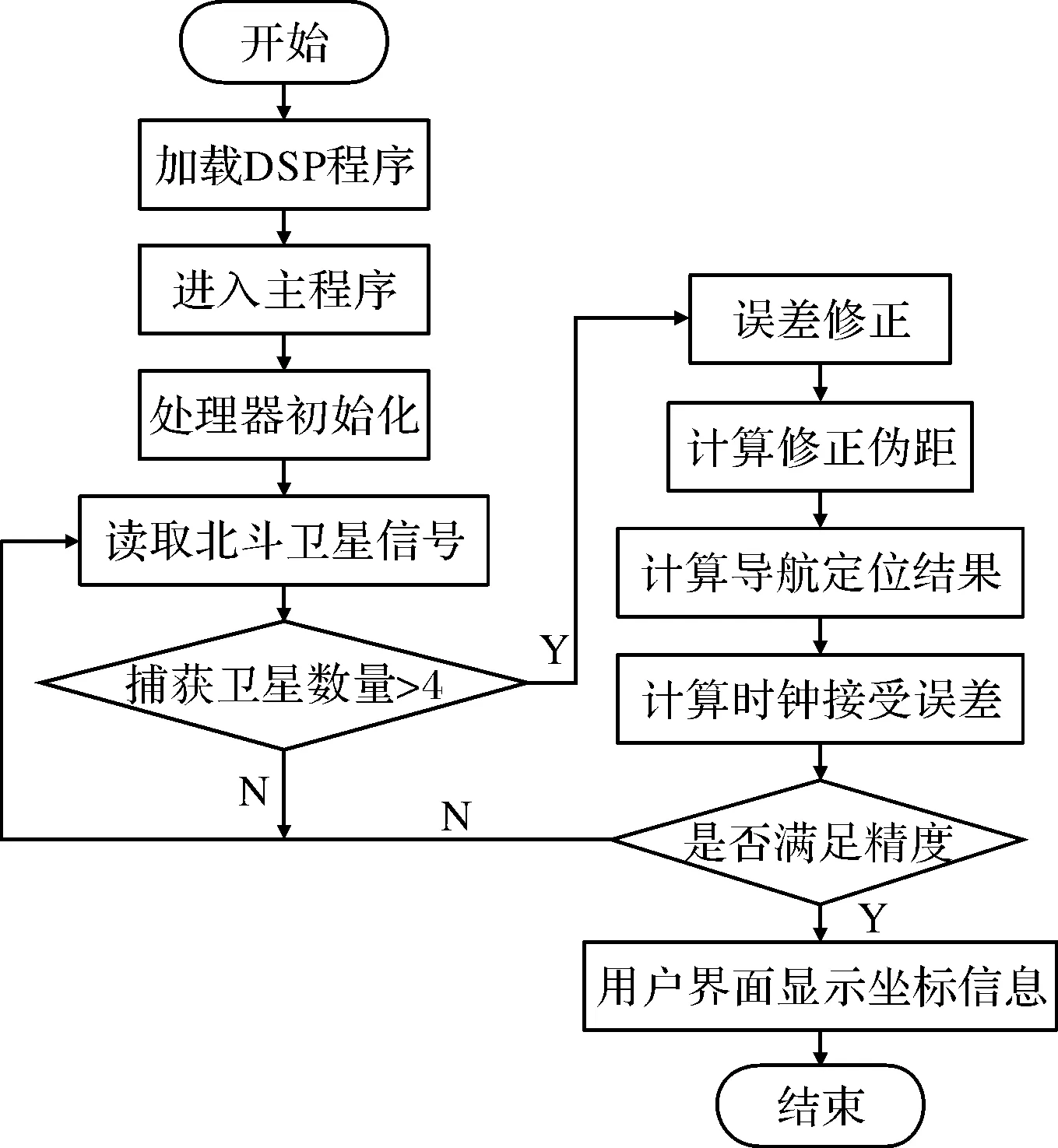
图3 程序设计流程图
初始化完成之后,系统开始进入while(1)循环,不断接收北斗卫星信号。为了对式(8)和式(9)进行求解,观测到的卫星数必须大于4才能获得准确的位置信息。当系统接收到的卫星信息能够建立位置信息的矩阵方程时,DSP对卫星的位置与速度信息进行计算,并得到卫星及用户之间的测量偏移量。最后采用上述定位解算方法得到用户接收机所在的位置信息,并将结果反馈到PC端。
4 结束语
本文基于北斗卫星系统,设计了一款能够满足远海通信定位的北斗卫星信号接收系统。并根据接收到的卫星信号,基于最小二乘法的求解思想,将非线性位置求解方程线性化,给出了海上定位求解算法。本文研究内容对于利用北斗卫星导航系统,实现海上定位具有重要意义。
猜你喜欢
中等数学(2020年2期)2020-08-24 07:58:46
测控技术(2018年6期)2018-11-25 09:50:18
测控技术(2018年9期)2018-11-25 07:44:24
电子制作(2018年19期)2018-11-14 02:36:40
测绘科学与工程(2017年3期)2017-08-16 02:46:08
测绘通报(2016年12期)2017-01-06 03:37:13
北京航空航天大学学报(2016年7期)2016-11-16 01:50:55
光学精密工程(2016年3期)2016-11-07 09:03:32
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04