
基于PLC的立体汽车停车装置设计
2018-12-03 03:49吴迎春徐连强
机械设计与制造工程 2018年11期
吴迎春,徐连强,何 壮
(无锡工艺职业技术学院机电工程系,江苏 宜兴 214206)
随着人们生活水平的提高,越来越多车辆的停放已成为一个严重的社会问题。立体车库占地面积小、自动化程度高,能有效解决城市中日益严重的汽车停放问题。国内的立体车库主要有升降横移类、垂直和水平循环类、平面移动类、巷道堆垛类、垂直升降类等。具有亚洲特色的停车设备技术起源于日本[1],以升降横移式停车设备为主,以德国为代表的欧洲国家的技术优势体现在巷道堆垛式产品上。我国的机械式立体车库行业起步较晚,在自动化程度方面与日本和欧洲等国家和地区的产品相比尚有差距[1]。
巷道堆垛式立体停车库投资大,设计原理源自于欧洲的自动化仓库,集成光、机电、控制等技术于一体,适用于大型密集式场合,在我国应用不多。国内立体停车设备以升降横移类为主,每层需有一个空位实施升降,系统的存取控制一般采用可编程逻辑控制器(PLC)实现[2]。
堆垛机的动力源一般为交流变频调速电机,当传送车运行时,需要结合光电开关进行快速、中速、慢速等多次速度调节,才能由PLC控制变频器完成刹车定位[3]。有文献采用直线电机作为车库横移装置,此方式虽然响应快但是定位偏差较大[4]。也有文献以巷道堆垛式立体车库为研究对象,设计了基于西门子PLC、结合WINCC组态软件监控的实验平台控制系统[5]。
本文设计的智能立体汽车停车装置类似巷道堆垛式立体车库,采用三菱PLC控制步进电机实现三轴输送运动,操作方便、定位准确、适应性强,可以为城市小区中家庭用车停车难问题提供新的解决方法。
1 停车装置机械结构
智能立体停车装置结构如图1所示,停车装置输送机构由三轴滚动导轨滑台实现,其中X轴实现输送机构左右运动,Y轴实现前后运动,Z轴实现上下运动。输送机构采用步进电机通过联轴器带动型号为1605的丝杠螺母副实现输送运动,螺母副公称直径为16mm、导程为5mm。立体车库采用2020型铝型材建造,使用标准角接件、螺钉连接,结构灵活、制作方便,在保证车库承载能力的同时还能进行尺寸调整。文中停车装置仅供验证停车动作及控制原理,实际停车应用还需要根据负荷选用尺寸和强度更大的型钢材料。
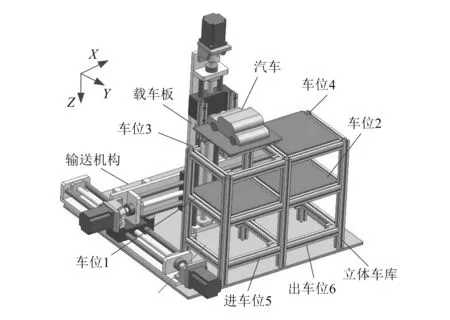
图1 停车装置结构
停车装置输送架结构两侧有定位块1,如图2所示,与载车板定位块3相互配合,确保在输送过程中载车板不会发生相对运动。当载车板放置在立体车库车位上时,每个车位也有相应定位块2,与载车板定位块3一起限制载车板自由度,保证载车板在立体车库的准确位置,使汽车在车库中能安全稳定停车。输送机构存载车板时,输送架携带载车板从空车位上方沿Z轴下降,至载车板被车位固定后输送架再沿Y轴退出;取载车板则是从满车位下方沿Z轴上升至载车板被输送机构定位块固定后,输送架再沿Y轴退出。

图2 载车板定位
2 停车装置电气控制系统
停车装置电气控制系统选用三菱FX3U-48MT型PLC作为控制核心,MT属于晶体管型,能实现三轴定位控制,其中Y0~Y2作为高速脉冲输出,Y4~Y6作为方向输出,Y10~Y12作为使能输出,用于控制三轴步进电机动作。电机采用雷塞公司的DM542步进电机驱动器进行驱动,步进电机驱动器采用共阳极接法。
在每根坐标轴滑台都配置了接近传感器,与滑块一起作用,作为步进电机回参考点信号和行程限位,以保证输送机构的运动定位精度。在进出车位配置光电传感器,以检测车位状态,并配置停止、启动按钮和指示灯,主要操作和参数的监控均由昆仑通态TPC7062KS触摸屏实现。停车装置电气原理如图3所示。
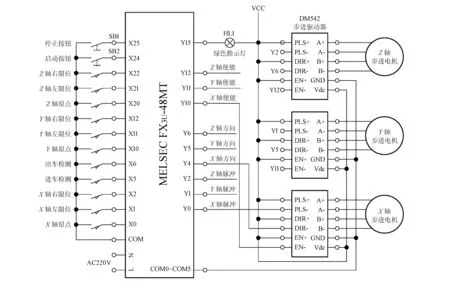
图3 停车装置电气原理图
3 PLC控制程序
停车装置控制系统PLC程序包括主程序和子程序。主程序主要有电机脉冲频率调整、手动控制、自动控制顺序功能图(SFC)程序等。子程序的功能是实现三轴步进电机归零操作,主要采用FX3UPLC定位控制指令中的原点回归指令[6]来实现。
停车装置控制系统设有手动和自动两种工作方式。手动控制方式主要用于输送架位置调试,通过PLC实现点动操作,采用定位控制指令中的相对位置控制指令来定位。
自动控制方式是停车装置正常的工作方式,图4是顺序功能图中车位1和2的进车流程分支,车位3和4进车流程及出车流程均为步骤类似的选择分支,车位5和6分别为进车位和出车位,编号规定如图1所示。当表示三轴回零完成的触点M30~M32闭合后,按下启动按钮M24置位状态S0,通过设置车灯辅助触点M105、M106及进车M90,采用定位控制指令中的绝对位置控制指令实现不同车位的定位,图4中未标注的状态转移条件是脉冲发送结束标志M8029。1X表示车位1的X坐标,1Z下表示取载车板时需从车位1的Z坐标下方定位,1Z上表示放载车板时需从车位1的Z坐标上方定位,Y到位、Y复位表示输送架Y向进入车位和退出车位,T50为出车检测延时,与M8029组成状态S17的转移条件。系统根据图4所示路径移动载车板自动完成进车动作,并改变车位显示状态信息,表明进车指令执行结束。

图4 车位1和2进车自动控制顺序功能图
自动控制顺序功能图程序放在主控指令中执行,如有紧急情况,可通过复位主控指令实现急停功能。
当步进驱动器开关设置为3 200脉冲/转,1605螺母副导程为5mm时,D8340~D8360为Y0~Y2脉冲当前值寄存器,则脉冲数值与距离的关系为3 200/5=640脉冲/mm,X,Y,Z三轴脉冲及转化为距离值的PLC程序如图5所示,为输送机构手动调试确定车位位置提供了基准。在PLC程序中可通过位置控制指令设置步进电机的工作频率和脉冲数,实现输送速度和位置的调整。

图5 输送机构位置显示
在停车装置进车过程中,当空载车板放在进车位后,车辆进入,光电开关检测到后延时5s,由输送机构将载车板送至选定车位;在出车过程中,当满载车板放在出车位后,光电开关检测到车辆后定时器计时,当车辆驶出后定时器下降沿触发延时5s后,输送机构将空载车板放至原车位,对应的PLC程序如图6所示。
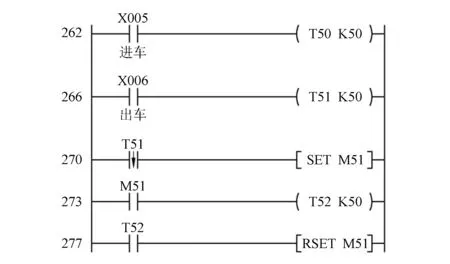
图6 进出车跳转
4 触摸屏界面设计
停车装置控制系统采用MCGS组态软件设计触摸屏界面,包括首页、手动控制界面和自动控制界面,如图7、图8所示,触摸屏与PLC连接的设备通道见表1。

图7 停车装置手动控制界面

图8 停车装置自动控制界面

序号连接变量通道名称序号连接变量通道名称1启动M2418车灯1M1052停止M2519车灯2M1063X回零M6020车灯3M1074Y回零M6121车灯4M1085Z回零M6222车1显示M1116X正向M8023车2显示M1127X反向M8124车3显示M1138Y正向M8225车4显示M1149Y反向M8326急停M20110Z正向M8427频率D011Z反向M8528X位置D200012进车M9029X脉冲D200513出车M9130Y位置D201014车位1M10131Y脉冲D201515车位2M10232Z位置D202016车位3M10333Z脉冲D202517车位4M104
首页主要显示控制系统名称、单位,以及当前日期、时间等。手动控制界面主要设置X,Y,Z回零按钮,以建立坐标基准。当需要手动测试或定位操作时,可以按相应坐标轴正负方向点动按钮,并有指示灯显示工作运行状态。正向点动时指示灯变绿,反向则指示灯闪烁。
自动控制界面包括输送频率设置、车位选择、车位状态信息展示及进出车动作选择等,通过频率设置可调节输送机构运动速度。
立体停车验证装置实物如图9所示,操作时,首先需要进行复位,调用归零子程序,以确定运动起点和基准。

图9 立体停车验证装置
在手动控制页面(图7),按X,Y,Z回零按钮进行复位,建立坐标轴基准。调试时按点动按钮示教每个车位、进出动作的位置及脉冲,确定PLC自动控制程序中步进指令的绝对脉冲数值。
在自动控制页面(图8),进车时,选择车位并点进车选项,对应车位工作指示灯变绿,按电气柜或触摸屏上的启动按钮,电气柜面板指示灯点亮,输送机构按编程路径将载车板放在进车位,待车辆驶入并按设定延时5s后,输送机构将满载车板放入对应车位,在控制界面相应车位显示有车信息,复位车位指示灯。取车时,选择车位并点出车选项,按启动按钮,输送机构将载车板放入出车位,待光电传感器测得车辆驶出并延时5s后,输送机构将空车板放回原来的车位,并显示车位无车信息。
运行中出现异常时可按急停按钮让设备停止运行,当输送机构完成某车位进、出车动作后,按停止按钮使设备停止工作。
5 结束语
本文提出的立体汽车停车装置,其立体输送机构采用三轴滚动导轨组,由PLC控制步进电机实现精确运动,适应性强;通过触摸屏控制输送机构行程、速度并监控立体车位状态,具有调整方便、监控直观、操作简单等优点。该停车装置的机械结构及控制系统可为机械式立体车库的改进提供新思路,具有一定的参考价值。
猜你喜欢
汽车画刊(2020年5期)2020-10-20
小哥白尼(趣味科学)(2020年3期)2020-07-27
祝您健康·文摘版(2020年3期)2020-04-09
中国特种设备安全(2019年4期)2019-05-20
军营文化天地(2018年2期)2018-04-20
现代家长(2018年11期)2018-01-05
电子制作(2017年2期)2017-05-17
小学生时代·大嘴英语(2017年1期)2017-03-20
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
数学大王·中高年级(2009年3期)2009-04-21
