基于VISSIM仿真的有轨电车交叉口信号优先控制策略研究
2018-12-01 07:04余冠华陈荣武
铁路计算机应用 2018年11期
余冠华,郑 伟,陈荣武
(1. 北京交通大学 电子信息工程学院, 北京 100044;2. 西南交通大学 信息科学与技术学院, 成都 611756)
现代有轨电车具有投资少,建设周期短,线路条件灵活,运行速度较快,乘车空间舒适,环保节能,噪声低等优点,因此越来越多的中小型城市以及大型城市郊区选择有轨电车来缓解交通压力[1]。我国目前有轨电车交叉口信号优先系统在行业内尚未形成统一的技术标准和规范,因此研究现代有轨电车交叉口信号优先系统显得非常必要而迫切[2]。德国将有轨电车在交叉口的信号控制机和交叉口信号控制系统分离,单独为有轨电车设置专用通行信号机,通过交叉口信号机和有轨电车专用信号机之间的逻辑联系,使有轨电车的信号更优先[3-4]。国内学者卫超[5]提出了路权形式,交叉口的渠化,车道布置等实现有轨电车在交叉口空间上的优先。钟吉林[6]和易志刚[7]讨论了有轨电车道口信号优先设计方案。本文在此基础上研究了有轨电车交叉口信号优先策略,并在VISSIM中建立了有轨电车交叉口信号优先控制的仿真模型,通过比较无信号优先,绝对信号优先和条件信号优先策略下的交叉口服务水平,验证了各个信号优先策略的有效性及适用情况。
1 有轨电车交叉口交通组织设计
在有轨电车交叉口区域,有轨电车与不同进口不同转向的社会车流交汇和分离,产生较多的分流点,合流点和冲突点,如图1所示。对有轨电车交叉口进行有效信号优先控制的基础是尽量减少或消灭这些分流点,合流点和冲突点,使得有轨电车处于空间上的优先地位。
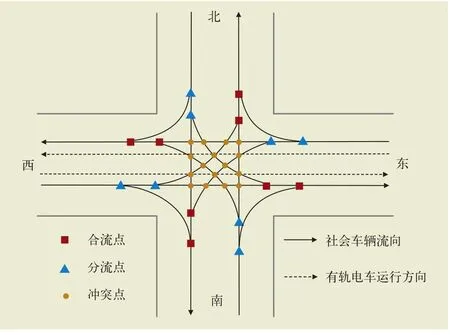
图1 无信号控制交叉口分流点,合流点,冲突点分布图
本文设计了一种交叉口渠化的交通组织,在空间上分隔或控制冲突的车流。如图2所示,交叉口4个方向的入口分别设置左转,直行和右转车道,消除了分流点;在交叉口4个方向的出口,均设置了3个车道,使从其他方向转向过来的车辆分别驶入自己的车道,消除了汇合点。
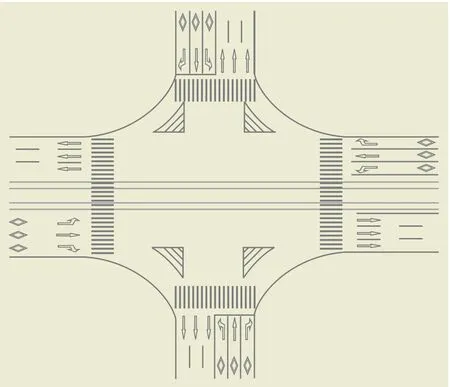
图2 有轨电车交叉口渠化图
为了向交叉口信号控制系统反馈实时的交通数据,从而实现对交叉口信号的最优控制,在有轨电车交叉口设计了4个检测器检测有轨电车的到达和离开,4个检测器的作用如表1所示。
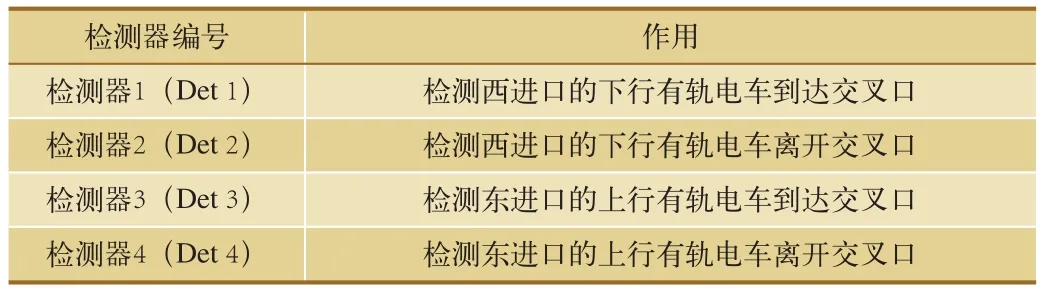
表1 4个检测器的作用
2 有轨电车信号优先控制策略设计
2.1 相位设计方案
采用四相位信号控制方式,在时间上分隔直行和左转的社会车流以及有轨电车直行和社会车辆左转车流,消除了冲突点,并为有轨电车设置2个专用相位,分别为相位5控制西进口的有轨电车通行,相位6控制东进口的有轨电车通行,如图3所示。在没有检测到有轨电车到达交叉口的情况下,相位1到相位4依次周期循环转换,当检测器检测到有轨电车到达交叉口,进行绿灯提前,红灯缩短或插入有轨电车相位。
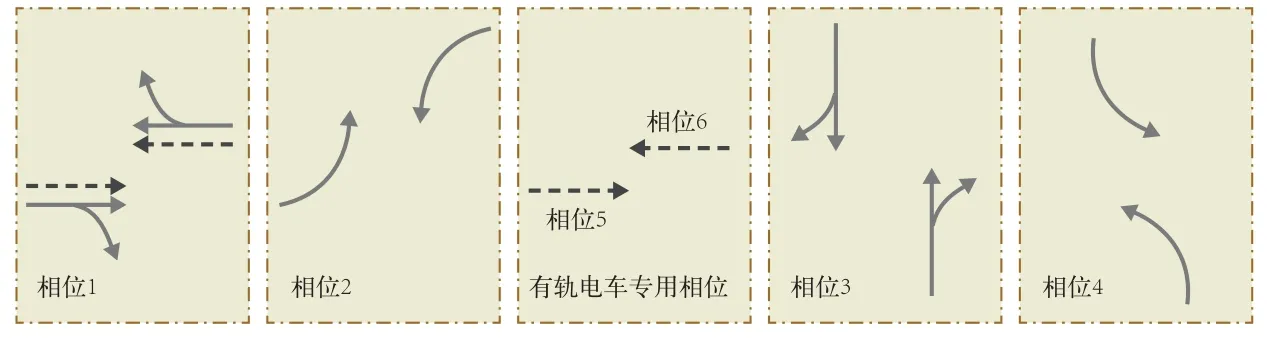
图3 四相位信号控制示意图
2.1.1 绿灯延长
绿灯延长即延长有轨电车相位的绿灯时间。当有轨电车在相位1的末尾到达交叉口时,系统延长相位1的绿灯长度,让有轨电车顺利通过,如图4所示。
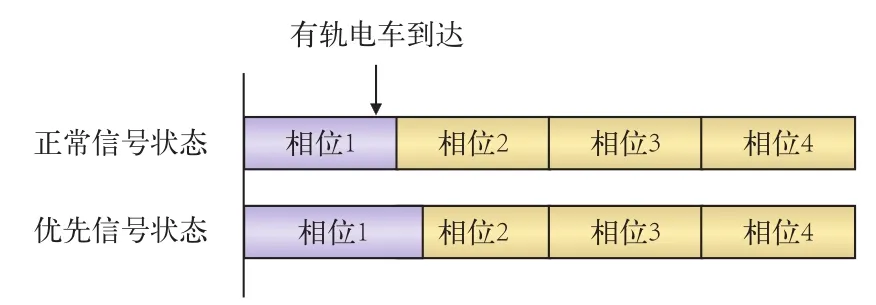
图4 绿灯延长策略图
2.1.2 红灯缩短
红灯缩短即缩短有轨电车等待绿灯信号的红灯时间。当有轨电车在相位4激活时到达交叉口,路口信号机提前结束相位4的绿灯相位,使相位1尽快开启绿灯。尽量让有轨电车不停车通过交叉口或者减少在交叉口的等待时间,如图5所示。

图5 红灯缩短策略图
2.1.3 插入电车相位
插入相位即在正常的相位相序中增加有轨电车相位。当有轨电车在相位2和相位3激活时到达交叉口,在当前相位结束(正常结束或提前结束)后插入一个有轨电车通行相位,使得有轨电车顺利通过。插入相位结束(即有轨电车通过)后,返回按照原有的相位顺利运行,如图6所示。
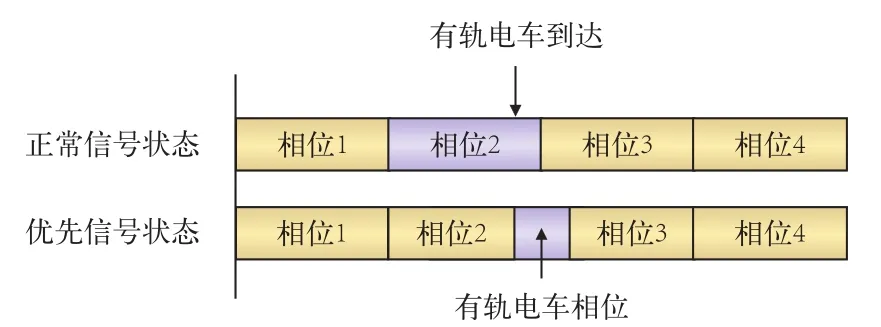
图6 插入有轨电车相位策略图
2.2 相位时长
相位时长与交叉口交通流量密切相关,在早高峰时段(7:30~8:30),对某有轨电车交叉口各进道口的车流量及各进道口不同流向的车流量进行了数量统计,统计结果表2所示。

表2 某十字交叉口交通流量调查结果表(veh/h)
将交通流量输入到Synchro 7.0软件[8]中,可生成最优信号配时方案为:相位1的时长为44 s,相位2的时长为14 s,相位3的时长为49 s,相位4的时长为13 s。
2.3 绝对信号优先控制
绝对信号优先控制是指无论有轨电车在感应信号控制的任何阶段到达,都会立刻启动有轨电车绿灯相位,保证有轨电车能够不停车通过交叉口。待有轨电车离开交叉口后,又回到跳转之前阶段的下一阶段。根据2.2节可知,相位1最大绿灯时间为44 s,相位2最大绿灯时间为14 s,相位3最大绿灯时间为49 s,相位4最大绿灯时间为13 s。
2.4 条件信号优先控制
条件信号优先控制是指检测器检测到有轨电车的到达后,还需要判断该阶段相位绿灯持续的时间,若不满足最小绿灯时间,则有轨电车停车等待,直到绿灯持续时间运行达到最小绿灯时间,开放有轨电车信号机绿灯信号;若该相位的绿灯持续时间大于或等于最小绿灯时间,则直接开放有轨电车信号,使有轨电车不停车通过交叉口。相位1能够和有轨电车相位同时开放,所以不用设定最小绿灯时间;相位2,相位3,相位4的最小绿灯时间 设置为各自最大绿灯时间的一半,分别为7 s,24 s,6 s。相位1,相位2,相位3,相位4的最大绿灯时间和绝对信号优先的最大绿灯时间一样。
3 VISSIM仿真实现与评价
VISSIM是一种微观的、基于时间间隔和驾驶行为的仿真建模工具[9]。有轨电车交叉口交通组织设计和有轨电车信号优先控制策略设计在VISSIM 软件中仿真图如图7所示。
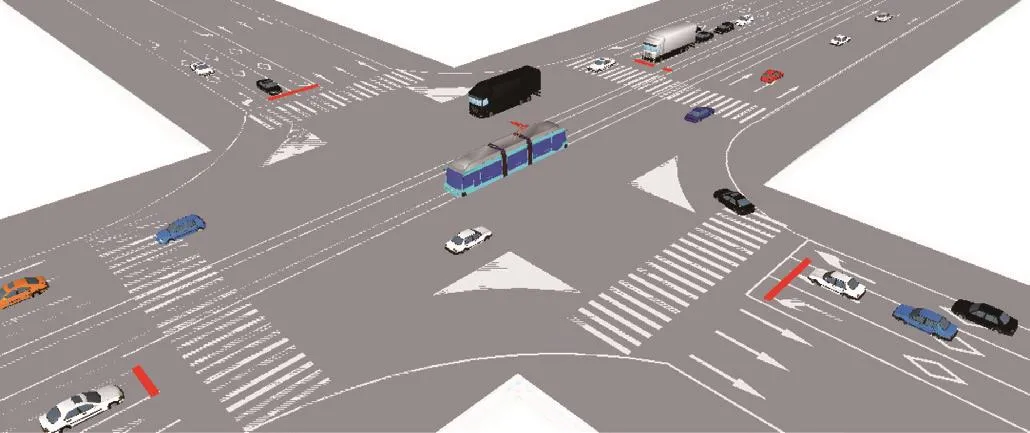
图7 VISSIM有轨电车交叉口仿真图
3.1 VISSIM仿真时序图
3.1.1 无信号优先控制下的相位时序图
无信号优先控制下的相位时序图如图8所示,SG1为控制东西进口社会车辆直行的相位1;SG2为控制东西进口社会车辆左转的相位2;SG3为控制南北进口社会车辆直行的相位3;SG4为控制南北进口社会车辆左转的相位4。从图8中可以看出,信号控制策略的4个相位,进行周期性的转换。相位1的时长为44 s,相位2的时长为14 s,相位3的时长为49 s,相位4的时长为13 s。

图8 无信号优先控制下的相位时序图
3.1.2 绝对信号优先控制下的仿真时序图
有轨电车绝对信号优先控制下VISSIM仿真的相位时序图如图9所示, SG5为控制上行有轨电车的相位5,SG6为控制下行有轨电车的相位6。Det 1~4为检测器1到检测器4,在表1中有具体的说明。

图9 绝对信号优先控制下的相位时序图
从图9中可以看出,当有轨电车分别从上行和下行方向经过交叉口时,优先控制策略运行逻辑分别如下:
(1)Det 3在74 s时激活,即检测到下行有轨电车驶入交叉口,此时相位3立刻经过3 s的黄灯转换时间跳转到相位1,并激活了相位6;Det 4在93 s时激活,即检测到下行有轨电车离开交叉口,此时相位1经过3 s的黄灯转换时间立刻跳转到相位4,并关闭了相位6。整个过程即在相位3和相位4之间插入了相位1和相位6,实现了有轨电车信号的绝对优先,使下行有轨电车能够不停车经过交叉口;并在下行有轨电车离开交叉口后立刻回到相位4,使实现下行有轨电车信号优先的同时,社会车辆的延误时间达到最小值。
(2)Det 1在171 s时激活,即检测到上行有轨电车驶入交叉口,此时相位2立刻经过3 s的黄灯转换时间跳转到相位1,并激活相位5;Det 2在190 s时激活,即检测到上行有轨电车离开交叉口,此时相位1经过3 s的黄灯转换时间立刻跳转到相位3,并关闭了相位5。整个过程即在相位2和相位3之间插入了相位1和相位5,实现了有轨电车信号的绝对优先,使上行有轨电车能够不停车经过交叉口;并在上行有轨电车离开交叉口后立刻回到相位3,使实现上行有轨电车信号优先的同时,社会车辆的延误时间达到最小值。
综上所述,有轨电车在任何一个相位到达交叉口,都会立刻激活到相位1和有轨电车相位(相位5或相位6),待有轨电车离开交叉口后,立刻回到之前相位的下一个相位,实现有轨电车信号绝对优先。
3.1.3 条件信号优先控制下的仿真时序图
有轨电车条件信号优先控制下VISSIM仿真的相位时序图如图10所示,分别有两辆上下行的有轨电车经过交叉口,它们的运行逻辑如下。
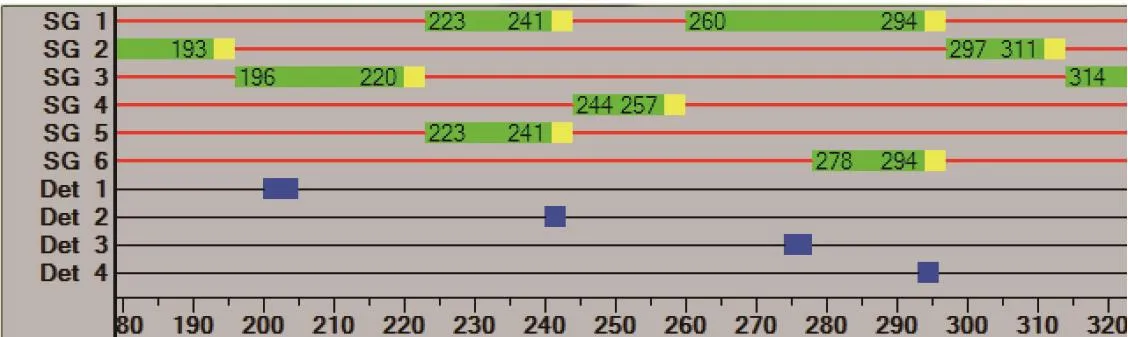
图10 条件信号优先控制下的仿真时序图
(1)当Det 1在200 s时激活,即检测到上行有轨电车驶入交叉口,此时交叉口相位3的绿灯持续时间Tgreen为:

由于相位3的最小绿灯时间Gmin为24 s,所以绿灯持续的时间未达到最小绿灯时间而不满足优先的条件,有轨电车需要停车等待,直到相位3满足最小绿灯时间24,即220 s时,才跳转到相位1并激活相位5。Det 2在241 s时激活,即检测到上行有轨电车离开交叉口,此时相位1经过3 s的黄灯转换时间立刻跳转到相位4,并关闭了相位5。
(2)当Det 3在278 s时激活,即检测到下行有轨电车驶入交叉口,此时交叉口正好相位1放行,所以不必考虑优先的条件,直接激活相位5,使下行有轨电车不停车通过交叉口。Det 4在294 s时激活,即检测到下行有轨电车离开交叉口,此时相位1经过3 s的黄灯转换时间立刻跳转到相位2,并关闭相位5。
3.2 VISSIM仿真评价
在得到仿真结果数据之前,需要在路网中设定行程路段,即起路段的起点和终点。本文设计了10个测量行程时间的路段,即8条社会车辆的行驶路段和2条上下行有轨电车行驶的路段。交叉口东南西北4个进口和交叉口整体的平均延误时间如表3所示。不同信号优先策略下交叉口各个方向的平均延误时间和停车次数如表4所示[10]。从表3和表4中可以得出结论:(1)若给予有轨电车最高的优先权,使有轨电车平均延误时间最小,停车次数为0,采用绝对信号优先控制策略较好;(2)若在基本上不影响整个交叉口的平均延误和服务水平的情况下给予有轨电车信号优先,采取条件优先信号控制策略较好。
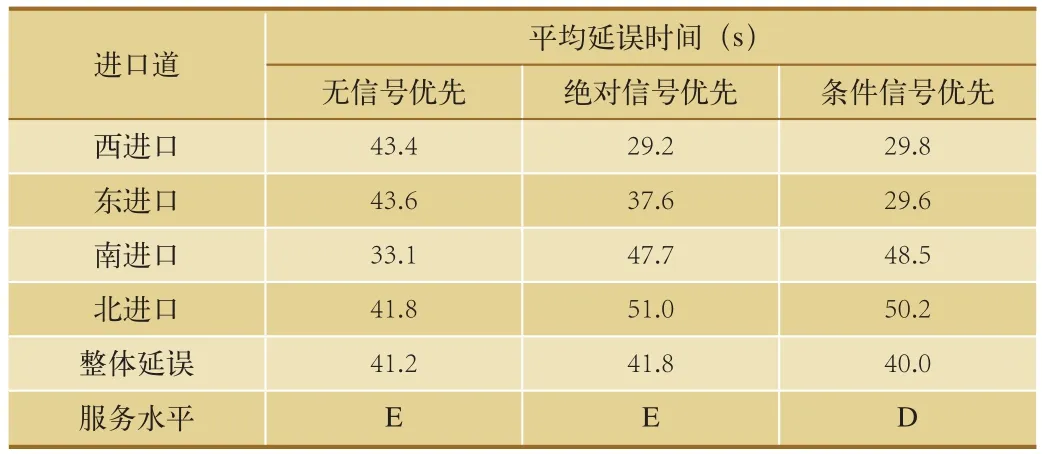
表3 不同信号优先策略下交叉口整体的平均延误时间

表4 不同信号优先策略下交叉口各个方向的平均延误时间
4 结束语
本文提出了有轨电车交叉口交通组织设计和信号优先控制策略的具体方案。在VISSIM中建立了渠化的路网模型并分别仿真了无信号优先、绝对信号优先和条件信号优先3种不同的信号控制方案。通过VISSIM的仿真评价,得到了绝对信号优先和条件信号优先策略的适用性,为提高有轨电车交叉口的服务水平提供了新思路。

猜你喜欢
建材发展导向(2022年14期)2022-08-19
建材发展导向(2021年19期)2021-12-06
作文周刊·小学一年级版(2020年40期)2020-10-19
天津建设科技(2020年2期)2020-05-13
火力与指挥控制(2018年10期)2018-11-13
中国交通信息化(2017年9期)2017-06-06
电子制作(2017年10期)2017-04-18
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24
雷达学报(2015年2期)2015-03-07
郑州大学学报(工学版)(2014年6期)2014-03-01