粒子群优化人工神经网络的RFID室内定位算法*
2018-11-28 02:12:46陈珊珊史志才张玉金陈计伟
传感器与微系统 2018年12期
陈珊珊, 史志才, 吴 飞, 张玉金, 陈计伟
(上海工程技术大学 电子电气工程学院,上海 201620)
0 引 言
随着无线传感、移动通信和互联网技术的快速发展,室内定位信息服务已经成为当前研究热点。虽然全球定位系统(global positioning system,GPS)从建立以来就广泛应用于室外定位,但GPS在室内环境中由于缺乏卫星接收器与卫星之间的视线传播,难以满足在室内环境下进行精度定位的要求[1]。
用于室内定位和室内导航服务的多种不同的定位方式中[2],射频识别(radio frequency identification,RFID)因成本低廉、系统部署简单,在室内定位和跟踪中得到广泛应用。传统RFID定位方法是依据传播模型中信号强度损耗和距离的关系获得标签与阅读器之间的距离,利用几何方法得到标签的坐标。但室内的信号传输不稳定,室内环境复杂,导致室内环境下建立的信号传播模型缺乏适用性[4]。目前人工神经网络(artificial neural network,ANN)也应用于室内定位中,该方法存在对初始权值敏感、易陷入局部最优和收敛速度慢等缺点。
本文将粒子群优化算法与人工神经网络算法相结合,首先利用粒子群优化(particle swarm optimization,PSO)算法对神经网络的权值和阈值进行优化,避免了人工神经网络预测值陷入局部最优。然后用过滤后的训练数据训练定位模型,建立目标位置预测模型,有效改善了人工神经网络的预测能力,具有预测时间短、所需训练数据少和预测精度高等优点[5]。
1 RFID室内定位算法分析
RFID的工作原理是当标签进入阅读器检测范围时,标签和阅读器之间将会通过天线建立通信,阅读器将会读取标签反馈的RFID数据,包括时间、接收信号强度指示(received signal strength indication,RSSI)值和身份(identification,ID)信息等。
一般阅读器获取定位标签的信号强度随着传播距离的增加而减弱,其中信号强度值和传播距离模型[6]为
(1)
式中RSSI(d)为阅读器读取与其相距为d(m)的电子标签的信号强度,P0为阅读器读取参考距离为d0(m)时电子标签的信号强度,γ为信号的路径损耗系数,d为阅读器与标签之间的距离,εδ为高斯噪声。
2 室内定位算法的改进
ANN是一种模拟生物特征的算法,具有灵活的自学习、自适应、自组织等特点。然而,经过ANN预测的结果可能是局部最优值[7]。文献[8]通过PSO确定ANN的隐含层的最佳节点数和最优学习率,将优化后的ANN分别用于室内和室外的定位,实验结果表明优化后的算法减少了室内和室外的定位误差。本文为了提高定位精度,对数据进行了高斯滤波处理,另外提出了一种基于PSO优化ANN(PSO-ANN)的定位算法,通过用PSO优化ANN的权值和阈值,以此来避免ANN预测值陷入局部最优,从而改善ANN的预测效果,提高ANN的学习速度。
图1为PSO优化ANN的迭代进化曲线,从图中可以看出当进化次数达到65时,适应度函数值趋于稳定,因此本文选择65作为PSO优化ANN的进化次数。
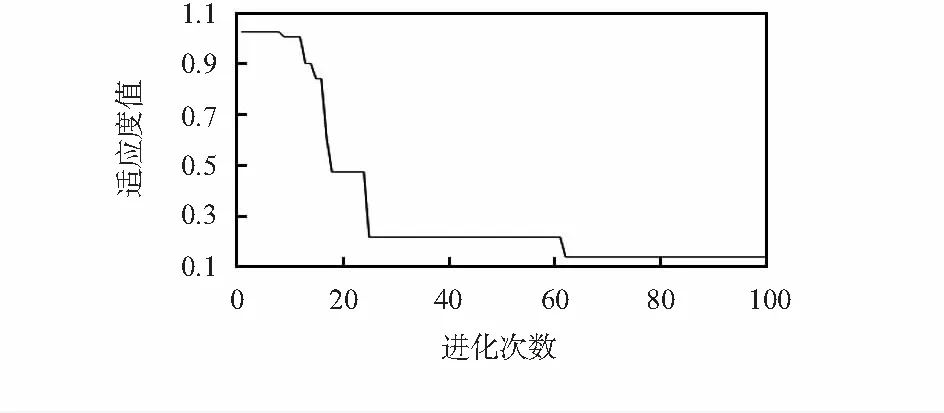
图1 最优个体适应度值
2.1 定位模型
RFID室内定位信息服务是建立高斯滤波后的RSSI向量与位置坐标之间的关系,可以描述为如下对应关系:

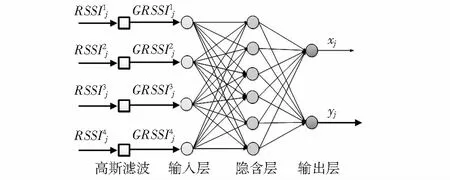
图2 定位算法的结构
图2中定位过程分为离线阶段和在线阶段。
1)离线阶段,4个阅读器分别重复读取50次每个参考标签的RSSI值,对重复读取的50个RSSI值进行高斯滤波处理,并将处理后的RSSI值与每个参考标签的坐标作为训练数据。另外需要初始化粒子群算法的位置和速度,用训练数据作为粒子群算法的输入得到最优的ANN权值和阈值,最后将优化后的ANN作为本文的定位模型。
2)在线阶段,需要把待定位标签接收的RSSI向量经过高斯滤波处理后获得(Gauss RSSI,GRSSI)向量作为定位模型的输入,由定位算法得到的坐标 即是待定位标签估计的定位位置。
2.2 数据滤波
在实际室内环境中,阅读器在同一位置重复测量的RSSI值遵循高斯分布[11]
(2)
式中σ2为方差,A为期望值,有
(3)
式中n为测量RSSI值的总次数,RSSIk为第k次测得的RSSI值。
3 实验结果分析
3.1 实验场景
本文使用MATLAB软件对提出的算法进行验证,完成了一系列仿真实验来验证提出算法的效果。定位场景是在一个12 m×5 m的长方形区域内,如图3所示,布置的参考标签形成了2维地图,每一个物理格被4个阅读器信号覆盖。在定位地图中,布置有50个参考标签,其相邻参考标签之间间隔1 m。另外,在定位地图放置4个阅读器天线来收集PSO-ANN的RSSI样本值。仿真前需要根据所有参考标签的坐标,分别计算出与4个阅读器之间的距离,将距离根据式(1)生成对应的RSSI向量,其中r取10;并在RSSI数据中添加均值为0、标准差为3的高斯噪声,作为RSSI的随机分量,以模拟实际环境中的噪声,然后通过高斯滤波对接收的RSSI值进行去噪。将参考标签的坐标和其对应的信号强度向量作为ANN和PSO-ANN的训练数据,用于两者的训练,使得训练后的ANN和PSO-ANN能够预测待定位标签的位置。
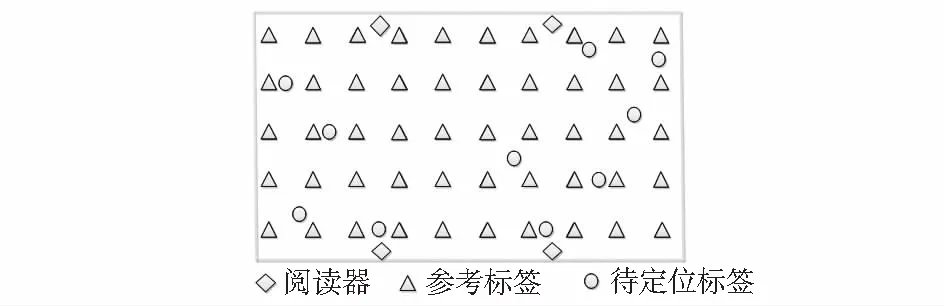
图3 定位系统模拟环境
3.2 实验结果
随机生成50个待定位标签的二维坐标,分别计算出每个待定位标签与4个阅读器之间的距离,利用式(1)计算每个待定位标签的RSSI向量,将这50个待定位标签的RSSI向量经过滤波处理后获得GRSSI向量,将GRSSI向量分别作为ANN和PSO-ANN的输入,分别通过2种算法预测出50个待定位标签的坐标,每种算法对50个待定位标签共进行了50次位置预测。ANN和PSO-ANN仿真测试结果分别如图4所示,图中实际输出代表待定位标签的预测位置,期望输出代表待定位标签真实位置。可以看出PSO-ANN算法的实际输出要比ANN更接近期望输出,即PSO-ANN预测的位置结果要比ANN更接近真实位置。
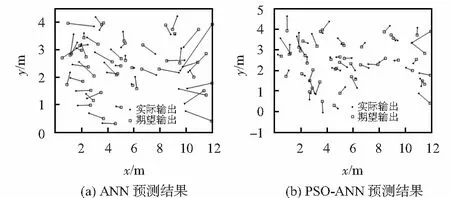
图4 2种算法预测结果对比
以位置误差验证测量系统的定位精度。第j个标签的测量位置的误差ej定位的平均误差eA为
(4)

本文将ANN算法和PSO-ANN算法分别对50个待定位标签的位置预测误差进行了比较与分析,其2种算法的50次预测待定位标签的误差比较如图5所示,从图5中可以看出本文算法的预测定位效果比人工神经网络效果好。
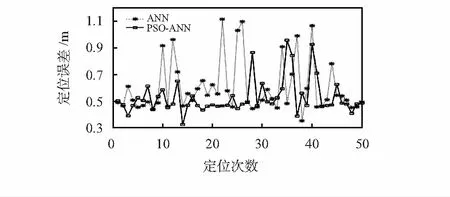
图5 2种定位算法的误差比较
对2种算法对50个待定位标签的位置预测误差进行了分析。从表1中可以看出ANN和PSO-ANN的平均误差分别为0.621 9 m和0.504 7 m,另外根据两种算法的标准差可知PSO-ANN算法比ANN算法的稳定性更好。对比结果表明本文定位算法的定位精度和稳定性均优于ANN定位算法。表1中根据文献[12]所获得的另外2种不同定位算法的平均定位误差,通过比较4种算法的平均误差,可知传统RFID定位效果比其他3种定位算法差,而本文提出的算法误差要小于文献[12]提出的算法。
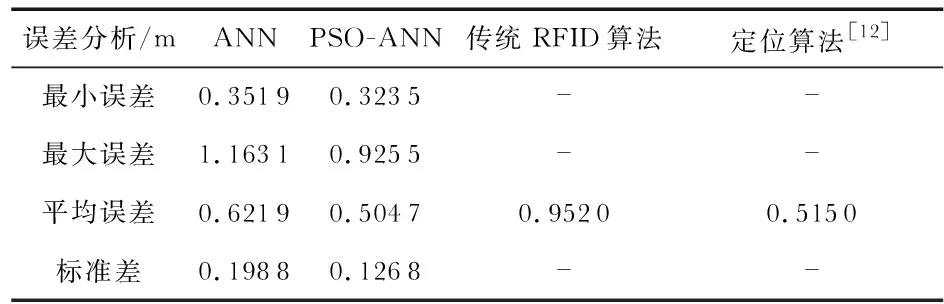
表1 4种算法误差对比
4 结 论
提出一种用粒子群优化人工神经网络的权值和阈值的算法。同时为了减少室内复杂环境对信号强度的干扰,提出了用高斯滤波处理RSSI值。实验结果表明,本文提出的室内定位算法提高了RFID室内定位精度,具有更稳定的定位性能,能够更好地适应复杂的室内环境。
猜你喜欢
电子设计工程(2022年15期)2022-08-17 10:07:04
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17 06:05:42
空间科学学报(2020年4期)2020-04-22 01:17:12
电子制作(2019年10期)2019-06-17 11:45:10
东北师大学报(自然科学版)(2018年3期)2018-09-21 09:06:36
现代测绘(2018年1期)2018-03-06 05:16:16
测绘通报(2016年9期)2016-12-15 01:56:16
现代计算机(2015年17期)2015-09-26 02:01:54
计算机工程(2015年8期)2015-07-03 12:19:45
建筑材料学报(2014年4期)2014-03-11 17:08:16