
智能高压电网逆变器数字化同步锁相控制技术
2018-11-28 09:06,,,
计算机测量与控制 2018年11期
, ,,
(1.国网浙江电力有限公司 金华供电公司,浙江 金华市 321017;2.北京中恒博瑞数字电力科技有限公司,北京 100085;3.中国矿业大学(北京) 机电与信息工程学院信息工程研究所,北京市 100083)
0 引言
锁相环是一种常见的反馈控制电路,可以通过控制外部输入信号的方式,达到调节内部环路信号相位、频率、震荡幅度等参数的目的。与一般闭环跟踪电路相比,锁相环具备更高的频率集成稳定性,可以通过压控振荡器发出的无线电信号辨别集成电路中的输入、输出端,并在保持本振信号相位差不变的前提下,对输出端的电压进行远程调节。当闭环电路中的往复电子与输出振荡信号保持相同的调节频率时,分频PLLIC信号的初始相位会出现明显的下降趋势[1]。此时,在位差恢复定理的促进下,一部分往复电子将会以振荡器受控信号的形式,在环路内部做反馈调节运动,直至电网输入、输出端的相位差恢复至初始状态,达到同步锁相的目的。
传统逆变器电网采用三相电路拓扑结构,并通过增设辅助电源的方式,使数字信号控制器发出的调制电子能够直接传输到逆变控制器的滤波输出电路中。在这种常见的逆变器结构中,为保证同步锁相控制技术的顺利应用,必须对三相逆变调制环节进行严格的ADC中断,并在后续SVPWM控制阶段使三相交流信号的相位逐渐实现统一。但随着运行时间的逐渐增加,这种方法不能对逆变器电网信号的相位参数进行有效调节,迫使有效的相位参数区间呈现逐渐缩小的变化趋势。
为解决上述问题,在智能PI逆变组织调制、锁相环响应性能分析等技术的支持下,提出一种新型的数字化同步锁相控制技术。并通过该项技术的调节作用,使电网逆变器信号的相位参数上、下限不断靠近两端极点。
1 智能高压电网逆变器结构
智能高压电网逆变器结构分析是新型数字化同步锁相控制技术研究的基础环节。在高压开关器件选择、电网数据采集电路完善等操作环节的支持下,其具体分析过程如下。
1.1 高压开关器件选择
逆变器高压开关器件以拓扑结构为LC滤波电路的三相隔离桥作为基础搭建设备。当高压输出端的负载能够对直流输入电源进行电气隔离控制时,高压开关器件将作为逆变器三相绕组制供电的一部分,为电网电路的顺次连接提供引导作用。传统电网逆变器为保证同步锁相控制技术的顺利实现,利用对等理论改进高压输出环节各级分布式电源间的关系,并通过一系列干预政策弱化主从控制结构间的依赖关系,进而使开关器件可以在不改变其它单元设置结构的同时,实现对电网核心系统的“即插即用”锁相控制。但这种方法过于注重对分布式电源的本地变量测量,易因输出电压控制不当、电网可调参数调配失衡等操作,造成逆变器信号相位参数的急剧变化[2-3]。在有限的极限空间内,过于强烈的逆变器信号相位参数变化,会导致锁相环闭合困难情况的出现。为避免上述情况的发生,新型数字化同步锁相控制技术采取输出电压幅值抑制理论对逆变器高压开关器件的无功功率进行严格限制。电网逆变器进入循环供电状态时,其自身无功功率与有效做功功率的比值会呈现逐渐下降的变化趋势。在该比值无线接近于零但始终不为零的情况下,对逆变器高压开关器件进行平滑切割,并在切割完成后保持较长一段时间的连通状态。在整个过程中,高压开关器件自身的负载供电特性不会发生任何改变,即锁相环能够在既定工作时间内,完成一次良好的闭合处理。具体逆变器高压开关器件的选择原理如图1所示。

图1 逆变器高压开关器件选择原理解析图
1.2电网数据采集电路完善
电网数据采集电路作为逆变器高压开关器件的直接下属环节,可以通过采集电网母线直流电压的形式,使网络内部输出交感电流、点差相位、电子序量等参数达到锁相环的闭合要求。传统锁相控制技术采用霍尔传感器实现逆变器输出电流的采集,并在保证同步电路结构、数字化参数始终保持一致的前提下,对高压电网环境中的处理电信号控制频率进行计算。在默认不发生弱电信号持续脉冲的前提下,处理电信号控制频率的波动幅度会呈现明显的浮动状态,此时浮动上、下限数值成为搭建电网数据采集电路的重要参数[4]。这种方法充分满足了智能高压电网环境下,逆变器数字化同步锁相环的A/D闭合要求,但弱电信号的稳定性相对较差,极难保持长时间的持续稳定脉冲,对锁相环的闭合产生较大影响。为解决上述问题,新型锁相控制技术通过直流母线与输出电感相结合的形式,对霍尔传感器的硬性结构进行改进,并通过外接线性好、响应效率高的高压电网控制器的方法,将逆变器的输出电压始终控制在额定条件下,达到在短时间内实现电网数据采集的目的。当智能高压电网逆变器输入、输出端电压能够维持基本水平时,数字化同步锁相环能够在较短时间内达到闭合状态。具体电网数据采集电路结构如图2所示。

图2 电网数据采集电路结构图
1.3 智能PI逆变组织调制
智能PI逆变组织是高压电网逆变器的重要组成部分。在顺应电网数据采集电路运行模式的基础上,一部分逆变组织采取PID控制方式,对同步锁相环的闭合参数进行整定处理,并在加强组织自身鲁棒性的同时,增强输出弱电信号的发射周期强度。在电网输出设备的逆变电压发生频繁改变时,锁相环核心设备的超调上限会超过额定限度,且较易引起PI控制器的抗积分饱和现象,进而造成严重的负载振荡情况[5]。随着数字化同步锁相环闭合时间的逐渐增加,严重负载振荡现象会导致电网信号相位参数的间距缩小,直至上、下限数值间的差值为零,最终导致锁相环失去闭合能力。为避免上述情况对锁相环闭合结果的影响,应用MPLAB ICD3技术对智能PI逆变组织进行调制处理。在明确电网数据采集电路各模块数据意义的前提下,利用ICSP串行代码对PIC单片机的数据控制操作进行重新编码处理[6]。当电网输出电压流经智能PI逆变组织时,一部分负责锁相控制的调节芯片会保持与数字化信号控制器相同的运行周期,并通过协调同步化运行周期的方式,促进智能PI逆变组织调制操作的快速进行。完成调制后的智能PI逆变组织结构如图3所示。
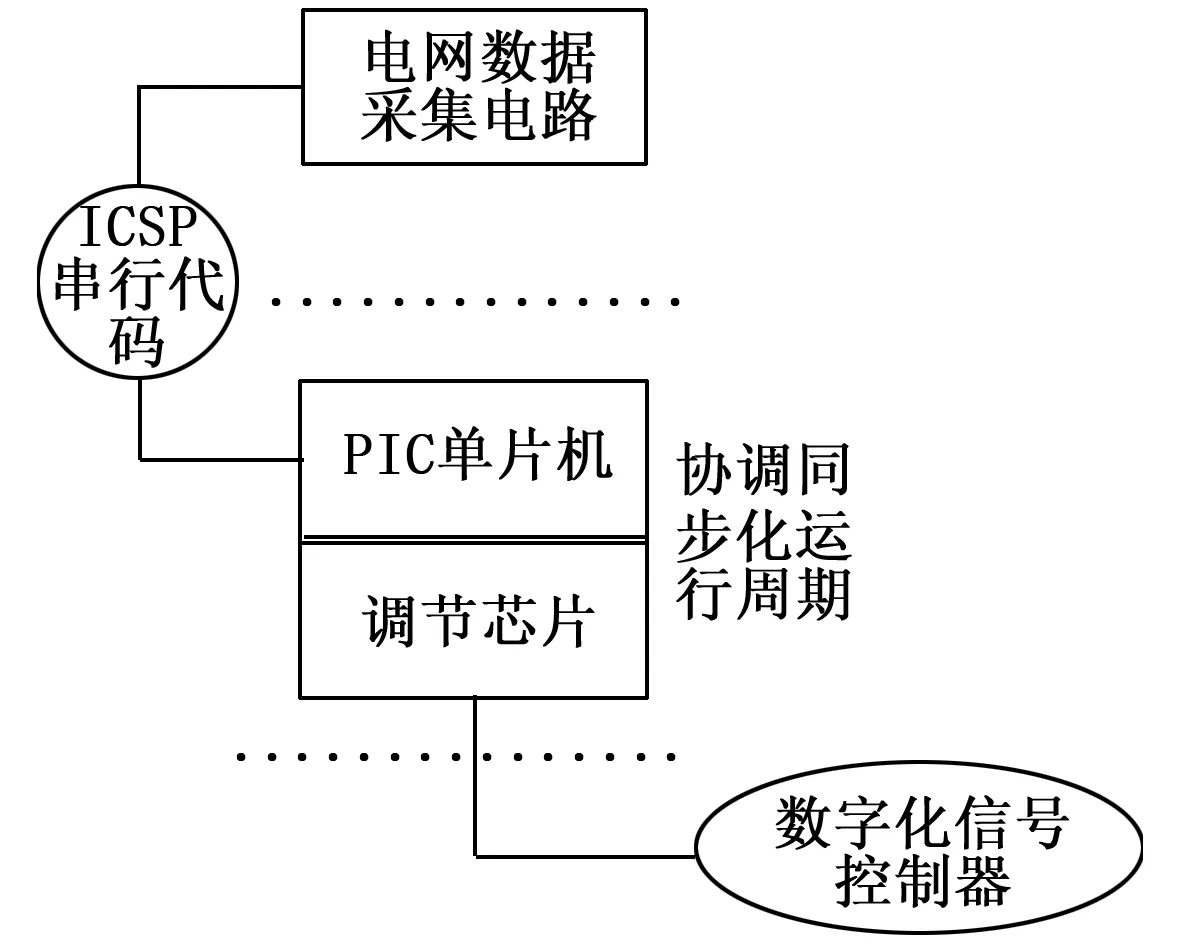
图3 智能PI逆变组织结构图
2 数字化同步锁相控制技术研究
在智能高压电网逆变器结构分析的基础上,通过逆变器锁相环同步响应性能分析、控制指标选择、循环流程完善三个步骤,完成新型锁相控制技术的顺利应用。
2.1 逆变器锁相环同步响应性能分析
逆变器锁相环同步响应性能分析需要借助同步信号采集处理结果、驱动输出频率、电网器件固定时延等参数。当高强度的电网逆变信号通过驱动振荡器时,高压电网内部的反馈回路呈现交互补偿状态。在此有力条件的影响下,逆变器锁相环同步响应性能会呈现逐渐增长的变化趋势。在智能高压电网逆变负载振荡频率不断升高的过程中,由数字化同步电源提供的集电极电流也呈现逐渐上升的变化趋势,此时,在集电极电阻压降作用的促进下,锁相环同步响应性能指标所承接的反向输入端电压也会随着降低[7]。为避免这种抗压电子对逆变器锁相环同步响应性能指标的影响,通过获取低损耗运行状态下功率因数角的方式,得到与之相对应的串联逆变频率,并利用D/A变换原理,对这些理论数值进行统一整理,达到分析逆变器锁相环同步响应指标的目的。设β代表功率因数角,U代表集电极的电阻压降值,利用β、U可将逆变器锁相环的同步响应性能指标表示为:
(1)
其中,μ代表逆变器锁相环的同步响应性能指标,K代表同步信号的驱动输出频率,i代表电网器件的固定时延,y代表电阻压降值的交互补偿系数,λ代表负载振荡频率,t代表相关振荡时间的倒数,g代表集电极电流的整体上升幅度,f代表低损耗运行状态下的端电压极值。
2.2 逆变器锁相环控制指标选择
根据逆变器锁相环同步响应性能分析结果可知,在智能高压电网环境下,锁相环控制效果可以通过并网运行指标、独立运行指标两项参数进行描述。当逆变器处于并网运行状态时,数字化电网可被同化为一个具有调节作用的受控单元,且其自身所承受的输出电压频率始终的反控电压保持相同。在此情况下,逆变器锁相环具备的所有输出功率都受到数字化电网电压频率的限制,即锁相环的控制指标会在富余电能的影响下,发生一定的调峰偏移,但随着逆变器供电时间的增加,该偏移的具体数值不会发生改变[8-9]。当逆变器处于独立运行状态时,一部分微量电子会在智能高压的影响下,脱离电网的覆盖区域,在只受到电压频率支撑的前提下,保持稳定供应的负荷频率。在逆变器通过特定能量管理手段实现对锁相环供电量的控制后,所有满足分布式输出条件的负载电子都能在一定程度上促进锁相环闭合时间的缩短,进而使逆变器锁相控制指标实现最大化调节的初衷。在上述理论基础的支持下,联立公式(1)可将逆变器锁相环的控制指标表示为:
(2)
其中,Q代表逆变器锁相环的控制指标,a代表数字化电网的调节受控系数,p代表输出电压频率,l代表数字化电网电压频率的限制参数,z代表电网覆盖因子,ϖ代表电压频率的支撑定量,C代表负载电子总量。
2.3 循环数字化控制流程完善
电网逆变器同步锁相环的循环数字化控制流程以核心输出电压控制作为起始环节。当智能高压电子进入逆变器开关器件后,相关锁相控制模块会根据多环反馈原理对电网中的电压频率进行基础调节,并在满足逆变器负荷功率共享原理的前提下,将分布在电网环境中的散乱电子进行整合统一。在数字化电压信号满足锁相控制要求的同时,与电网输出电压频率相同的锁相控制载流子可以通过数字化滤波的促进作用,自发的进入逆变锁相电阻中[10]。在逆变器供电时间的不断累积的前提下,电阻自身的阻抗值会呈现小幅度上升的变化趋势,此时高压电网内部的无功功率会达到瞬时最大值。电压调节装置作为与逆变器输出端直接相连的循环数字化结构,能够自行感知电网内部电压的变化情况,并在通过幅值限定理论截获大量无功载流子,缩短逆变器锁相环的闭合周期,实现数字化控制流程的促进作用。至此,完成智能高压电网逆变器数字化同步锁相控制技术的顺利用于,其具体循环控制流程如图4所示。
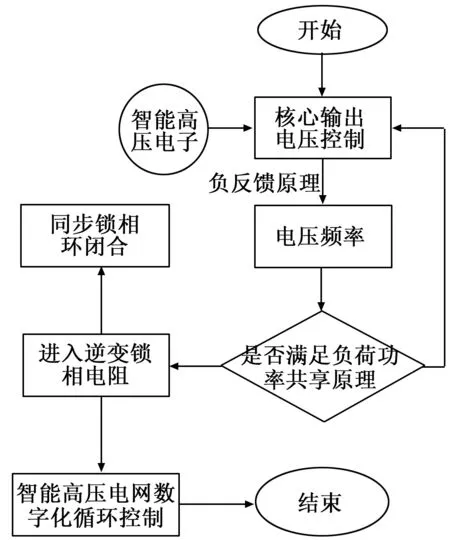
图4 循环数字化控制流程图
3 实验结果与分析
为验证智能高压电网逆变器的新型数字化同步锁相控制技术的实用性价值,设计如下对比实验。令两台配置霍尔传感器的计算机作为实验对象,分别令其搭载新型锁相控制技术和传统锁相控制技术,其中前者作为实验组、后者作为对照组。以100 min作为实验时间,分别对比在该段时间内,应用实验组、对照组方法后,电网信号相位参数上、下限的变化趋势。
3.1 实验参数设置
为保证实验的绝对真实性,可根据下表对相关实验参数进行设置。
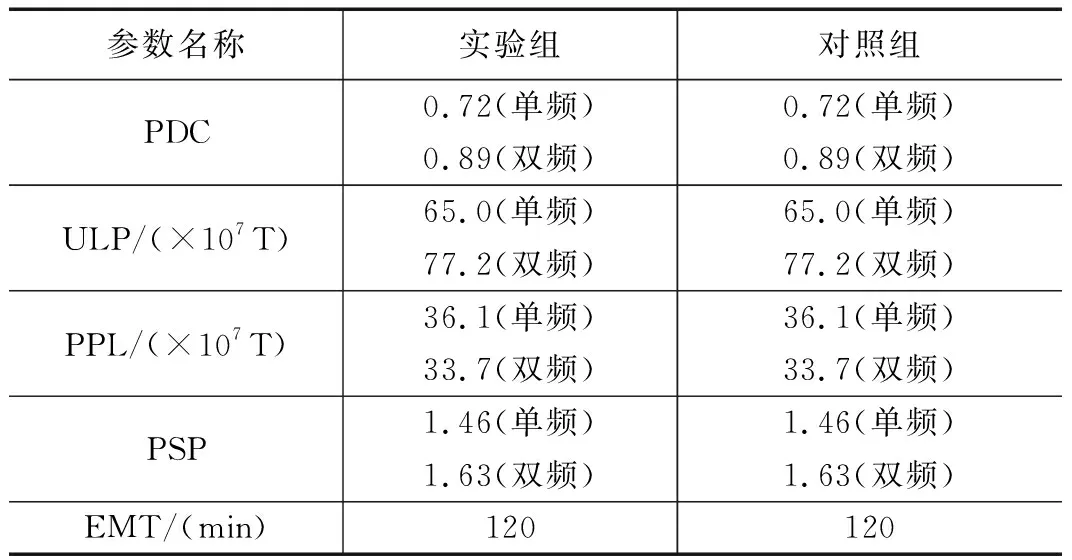
表1 实验参数设置表
表1中参数从上之下依次代表相位检测系数、相位参数上限、相位参数下限、电网信号参数、实验时间,为保证实验结果的公平性,实验组、对照组实验参数始终保持一致。
3.2 电网信号相位参数上限对比
为避免突发性事件对实验结果的影响,本次实验分为两部分进行。在霍尔传感器计算机保持单频工作状态、相位检测系数为0.72的情况下,分别记录应用实验组、对照组方法后,电网信号相位参数上限的变化趋势;在霍尔传感器计算机保持双频工作状态、相位检测系数为0.89的情况下,分别记录应用实验组、对照组方法后,电网信号相位参数上限的变化趋势。具体实验结果如图5~6所示。

图5 电网信号相位参数上限对比图(单频)
分析图5可知,在霍尔传感器计算机保持单频工作状态下,随着实验时间的增加,应用实验组方法后,电网信号相位参数上限数值大都集中在70.0×107T~90.0×107T之间,实验时间处于60~80 min之间时,电网信号相位参数上限数值达到最大值86.2×107T,超过目标上限65.0×107T;应用对照组方法后,电网信号相位参数上限数值大都集中在50.0×107T~70.0×107T之间,实验时间为100 min时,电网信号相位参数上限数值达到最大值72.4×107T,远低于实验组。综上可知,在霍尔传感器计算机保持单频工作状态时,应用实验组方法后,电网信号相位参数上限提升幅度达到16%。
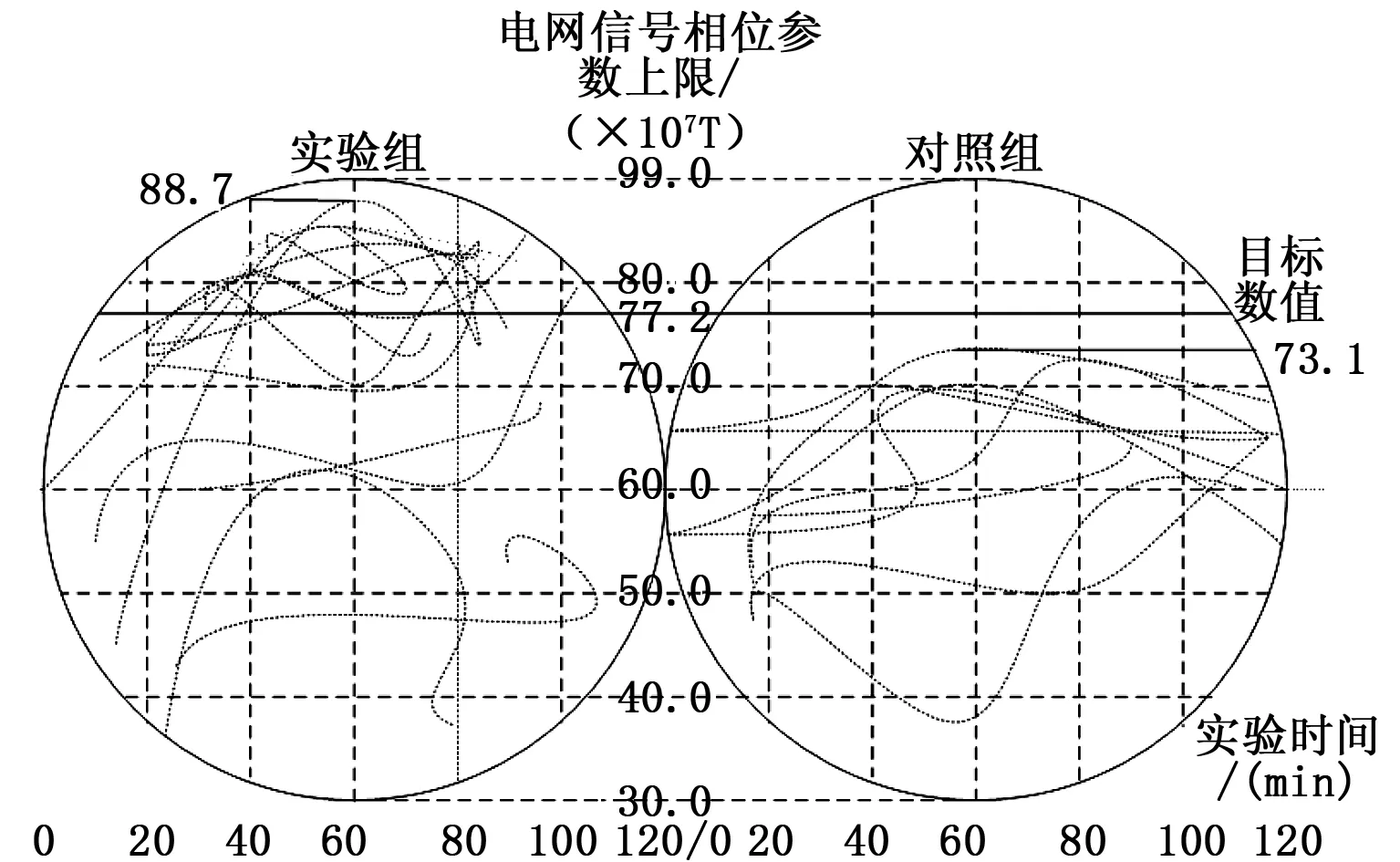
图6 电网信号相位参数上限对比图(双频)
分析图6可知,在霍尔传感器计算机保持双频工作状态下,随着实验时间的增加,应用实验组方法后,电网信号相位参数上限数值大都集中在80.0×107T~90.0×107T之间,实验时间为60 min时,电网信号相位参数上限数值达到最大值88.7×107T,超过目标上限77.2×107T;应用对照组方法后,电网信号相位参数上限数值大都集中在60.0×107T~70.0×107T之间,实验时间处于40~60 min之间时,电网信号相位参数上限数值达到最大值73.1×107T,远低于实验组。综上可知,在霍尔传感器计算机保持双频工作状态时,应用实验组方法后,电网信号相位参数上限提升幅度达到17%。
3.3 电网信号相位参数下限对比
为避免突发性事件对实验结果的影响,本次实验分为两部分进行。在霍尔传感器计算机保持单频工作状态、电网信号参数为1.46的情况下,分别记录应用实验组、对照组方法后,电网信号相位参数下限的变化趋势;在霍尔传感器计算机保持双频工作状态、电网信号参数为1.63的情况下,分别记录应用实验组、对照组方法后,电网信号相位参数下限的变化趋势。具体实验结果如表2、表3所示。
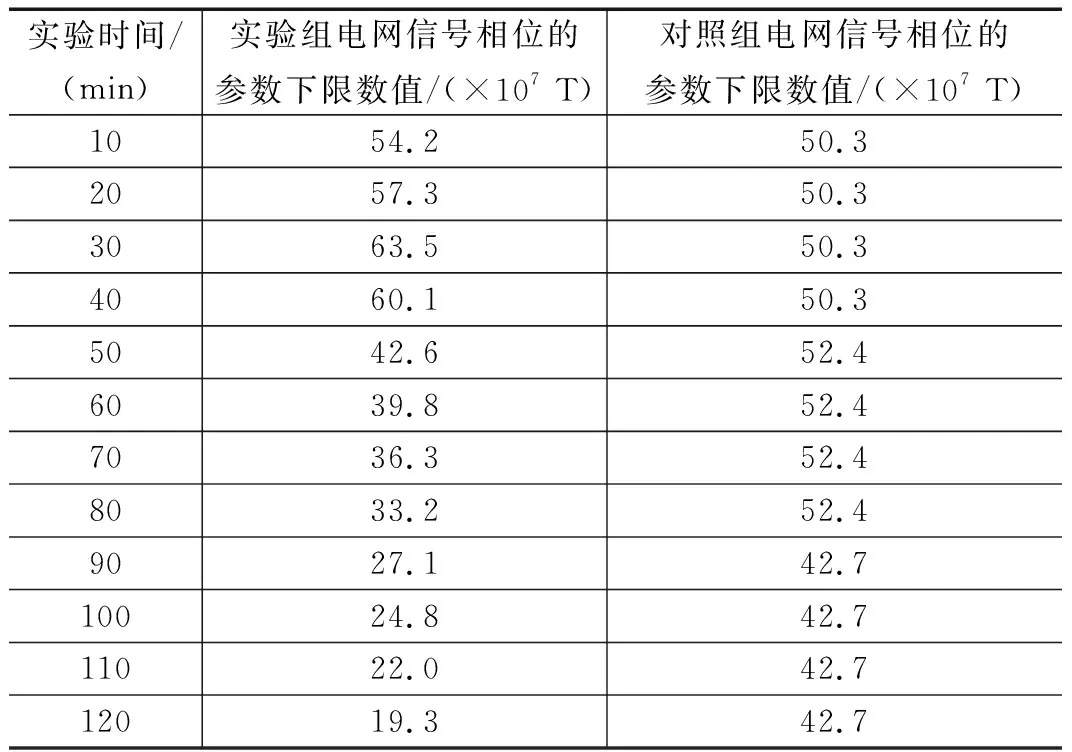
表2 电网信号相位参数下限对比表(单频)
分析表2可知,在霍尔传感器计算机保持单频工作状态下,随着实验时间的增加,应用实验组方法后,电网信号相位参数下限数值呈现先上升、再下降的变化趋势,实验时间为120 min时,电网信号相位参数下限数值达到最小值19.3×107T,远低于目标数值36.1×107T;应用对照组方法后,电网信号相位参数下限数值呈现先阶梯状上升、再阶梯状下降的变化趋势,实验时间达到90 min后,电网信号相位参数下限数值达到最小值42.7×107T,远高于实验组。综上所述,在霍尔传感器计算机保持单频工作状态时,应用实验组方法后,电网信号相位参数下限降低幅度达到54%。

表3 电网信号相位参数下限对比表(双频)
分析表3可知,在霍尔传感器计算机保持双频工作状态下,随着实验时间的增加,应用实验组方法后,电网信号相位参数下限数值呈现上升、下降交替出现的变化趋势,实验时间为100 min时,电网信号相位参数下限数值达到最小值31.5×107T,远低于目标数值33.7×107T;应用对照组方法后,电网信号相位参数下限数值呈现上升、稳定、下降的变化趋势,实验时间为120 min时,电网信号相位参数下限数值达到最小值41.0×107T,远低于实验组。综上所述,在霍尔传感器计算机保持双频工作状态时,应用实验组方法后,电网信号相位参数下限降低幅度达到23%。
4 结束语
在保留传统锁相控制技术应用优势的基础上,针对逆变器组织结构进行更新改进,提出智能高压电网逆变器数字化同步锁相控制技术。在霍尔传感器计算机保持单频、双频运行状态下,分别应用该方法,对比多次实验结果,证明该方法在实用性方面的突出价值。
猜你喜欢
军民两用技术与产品(2022年6期)2022-08-06
电气电子教学学报(2022年3期)2022-07-30
煤气与热力(2022年2期)2022-03-09
南方电网技术(2021年8期)2021-09-24
中学生数理化·高一版(2021年11期)2021-09-05
舰船科学技术(2021年12期)2021-03-29
舰船科学技术(2021年12期)2021-03-29
电动工具(2020年4期)2020-08-20
电子制作(2019年15期)2019-08-27
廉政瞭望(2018年15期)2018-09-17
