基于RS码的某运载火箭图像测量系统设计与实现
2018-11-28 09:20:18,,,
计算机测量与控制 2018年11期
,,,
(1.上海宇航系统工程研究所,上海 201109; 2.上海航天电子技术研究所, 上海 201109)
0 引言
近几年,中国运载火箭迎来高密度发射期,为更好的掌握火箭飞行试验过程的状态信息,深入了解产品性能,提高产品的可靠性,丰富传统测试手段,伴随5 Mbps、10 Mbps以及更高码率传输体制[1-2]的应用为基础,图像视频测量技术越来越多的被使用。
测试场地的变化、发射卫星不同、飞行过程中火焰扰动等干扰因素的存在,可能造成图像信道误码,地面解调时出现马赛克、花屏、卡顿的现象。给出一种基于RS码的图像测量系统设计方案,能有效改善信道误码、提高信道增益[3-4],有效提高图像画质质量。
1 RS码时域编码方法
对于RS(n,K)码,假定:
待编码的信息码矢M为:
M=[Mk-1Mk-2…M1M0]
(1)
即信息多项式M(x)为:
(2)
C=[Ck-1Ck-2…C1C0]
(3)
即码字多项式C(x)为:

g(x)=∏(x-αi)=(x-α)(x-α2)…(x-α(2t))
(4)
编码时,用xn-kM(x)除以g(x),所得余数r(x)是校验多项式,将r(x)置于信息多项式M(x)之后,就形成RS码,由4所示。
C(x)=xn-kM(x)+r(x)
=xn-kM(x)+xn-kM(x)mod(g(x))
(5)
式中,

RS码为:
伊恩·罗兰的悲壮牺牲几乎使斯通的探险计划成为泡影。一个队员护送伊恩的尸体回苏格兰。其余的队员都愤怒地指责斯通,说他作为队长,对洞穴着了迷,工作热心得过了头。一时间,探察队里人们的关系紧张起来。幸好经过会议表决后,剩下的队员都同意留下,但他们要求摄影师韦斯·史基尔斯把洞穴已知部分用文字记录下来。
C=[Cn-1Cn-1 …C1C0]=
[Mk-1Mk-2 …M0rn-k-1rn-k-2…r0]
(6)
其中信息位为前k位,校验位为后n-k位,这个算法为RS码的时域编码算法[5-8],步骤可以归纳为:
1)用xn-k乘以信息多项式M(x),,得到xn-kM(x);
2)用xn-kM(x)除以生成多项式g(x),取其余式,得到校验多项式r(x);
3)联合信息多项式M(x)和校验多项式r(x),得到码字多项式C(x)。
图像测量系统码流格式除去子帧同步码和子帧计数,一个子帧有效数据为184 byte,校验长度选择16 byte ,采用RS(184,168)格式进行编码,信道利用率可达到91%,满足图像传输要求。
2 图像测量系统设计
图像测量系统用于监测火箭飞行过程中的关键事件,由摄像机、图像压缩编码器、发射机、天线、电池、配电器等组成。图像压缩编码器将摄像头送入的图像数据进行数据采集压缩、RS编码、数据综合编帧形成PCM码流,通过发射机调制后,由天线进行信号发射下传。图像测量系统原理框图如图1所示。
图像测量系统采用S波段点频,PCM-FM调制体制。文中将对摄像机和图像压缩编码器设计原理进行介绍,传统遥测传输体制设计不做过多阐述。

图1 图像测量系统原理框图
2.1 摄像机
摄像机分为两个模块,包括光学部分和电学部分。摄像机可实现了图像采集、数据输出等功能,为了满足系统对摄像装置体积小及重量轻的要求,摄像机选用了集成度较高且焦面尺寸较小的感光元件作为sensor,sensor自身集成了复合视频输出接口,其与图像编码器之间只有供电线路及复合视频接口。其原理框图如图2所示。

图2 摄像机原理框图
2.1.1 光学部分
光学系统共9片透镜,第一片透镜的通光口径最大,为φ13.2 mm。从镜头第一面到最后一面的长度为42 mm,后工作距离为2 mm,总长(第一面中心到像面)为45 mm。单片透镜平均透过率达到97.6%,光学系统的透过率为0.9769=80.3%。
光学系统采用了无热设计,在-40~60 ℃温度区间内全视场全波段范围内畸变≤1.2%(全视场)。在-40~60 ℃范围内,0.7归一化视场与中心视场的相对照度20 ℃时为93.3%、-15 ℃时为93.2%、50 ℃时为93.4%,差别很小且一致性较好;定焦面0.2 m,0.7视场75 lp/mm时传递函数值均在0.45以上,全视场75 lp/mm时传递函数值均在0.35以上;定焦面0.4 m,0.7视场85 lp/mm时传递函数值均在0.5以上,全视场85 lp/mm时传递函数值均在0.38以上;定焦面1 m,0.7视场70 lp/mm时传递函数值均在0.5以上,全视场70 lp/mm时传递函数值均在0.28以上;定焦面10 m,0.7视场60 lp/mm时传递函数值均在0.5以上,全视场60 lp/mm时传递函数值均在0.38以上;定焦面50 m,0.7视场60 lp/mm时传递函数值均在0.5以上,全视场60 lp/mm时传递函数值均在0.38以上。摄像机摄像距离最短可到0.2 m,最远不小于50 m。线对数85 lp/mm,0.7视场传递函数可达到≥0.4、全视场传递函数≥0.3。
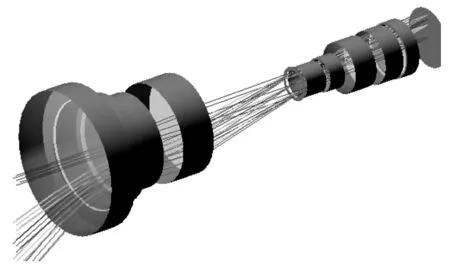
图3 光学部分布局图
2.1.2 电学部分
摄像机采用光学、电子学系统、结构一体化的设计形式,使用Omnivision公司OV10635的CMOS传感器作为感光元件,该传感器是将图像预处理功能集成于一片SOC上的集成电路。摄像机电学部分由一块印制板构成,主要包含一个CMOS sensor、一片视频运放、晶振、一片FPGA、一片ADV7393及两个LDO等器件组成,它完成传感器的图像成像及输出、驱动的功能。CMOS sensor在通过FPGA控制配置相应寄存器的控制下完成图像数据采集、预处理等功能,并输出RGB格式的信号,FPGA再将此RGB格式的信号转换成BT656/SDI格式的图像数据,最终由ADV7393/GV7600输出标准PAL-D制式的图像数据。两个LDO则用于将输入的+5 V供电转换为器件工作所需的+3.3 V和+1.5 V工作电压,通过一个一体化接插件实现对外的输入输出接口。摄像机的电原理框图如图4所示。
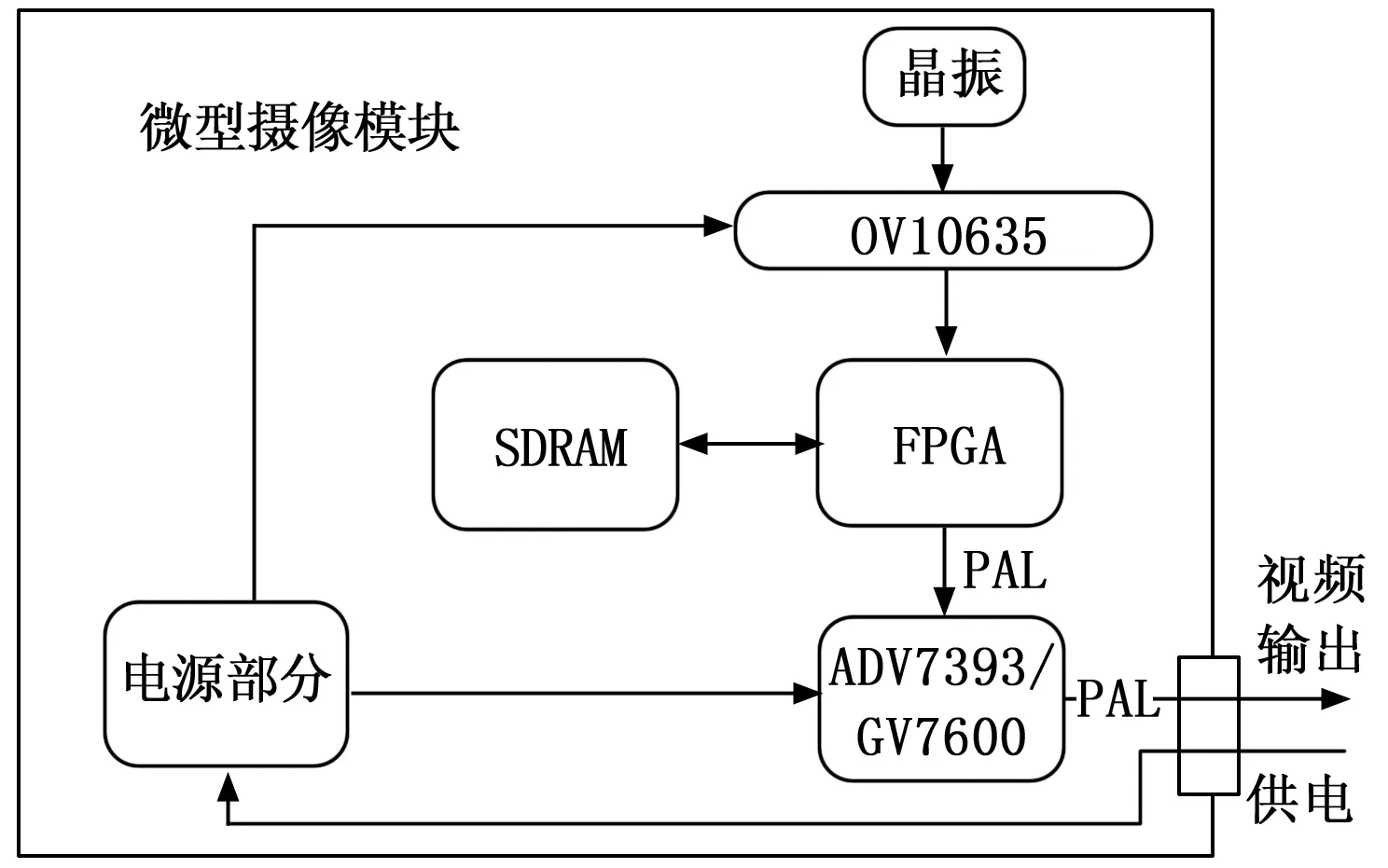
图4 摄像机电原理框图
CMOS sensor选择OminiVision公司的OV10635芯片,这是一款像元尺寸6 um,像元数1 280×720的CMOS图像传感器作为光电转换芯片。该CMOS图像传感器将图像的成像、预处理、3A控制等功能整合在一个片上系统中,这样可以极大地减小单机尺寸、功耗及sensor外围信号处理电路设计的复杂度;并且该芯片动态范围宽、灵敏度高、工作方式灵活,可直接输出PAL制复合视频信号。该芯片集成了CMOS sensor、微处理器,用于实现自动曝光、自动增益控制、自动白平衡等算法,具备图像自动修正、降噪和增强功能。快门类型为电子卷帘快门,数据输出采用SCCB(兼容I2C总线)串行总线接口,通过改变CMOS传感器内部寄存器的设定值可以对传感器的电子增益、像素积分时间、传感器曝光时间、输出图像大小、输出图像位置和图像输出帧率分别进行控制。
2.2 图像压缩编码器
图像压缩编码器接收摄像机输出的标清PAL制或高清SDI视频信号,对该信号进行AD转换后以一定格式的数字信号输出, DSP完成图像数据的编码及输出, FPGA完成RS编码和图像数据组帧,由此实现动态视频的纠错压缩编码功能。图像压缩编码器原理框图如图5所示。
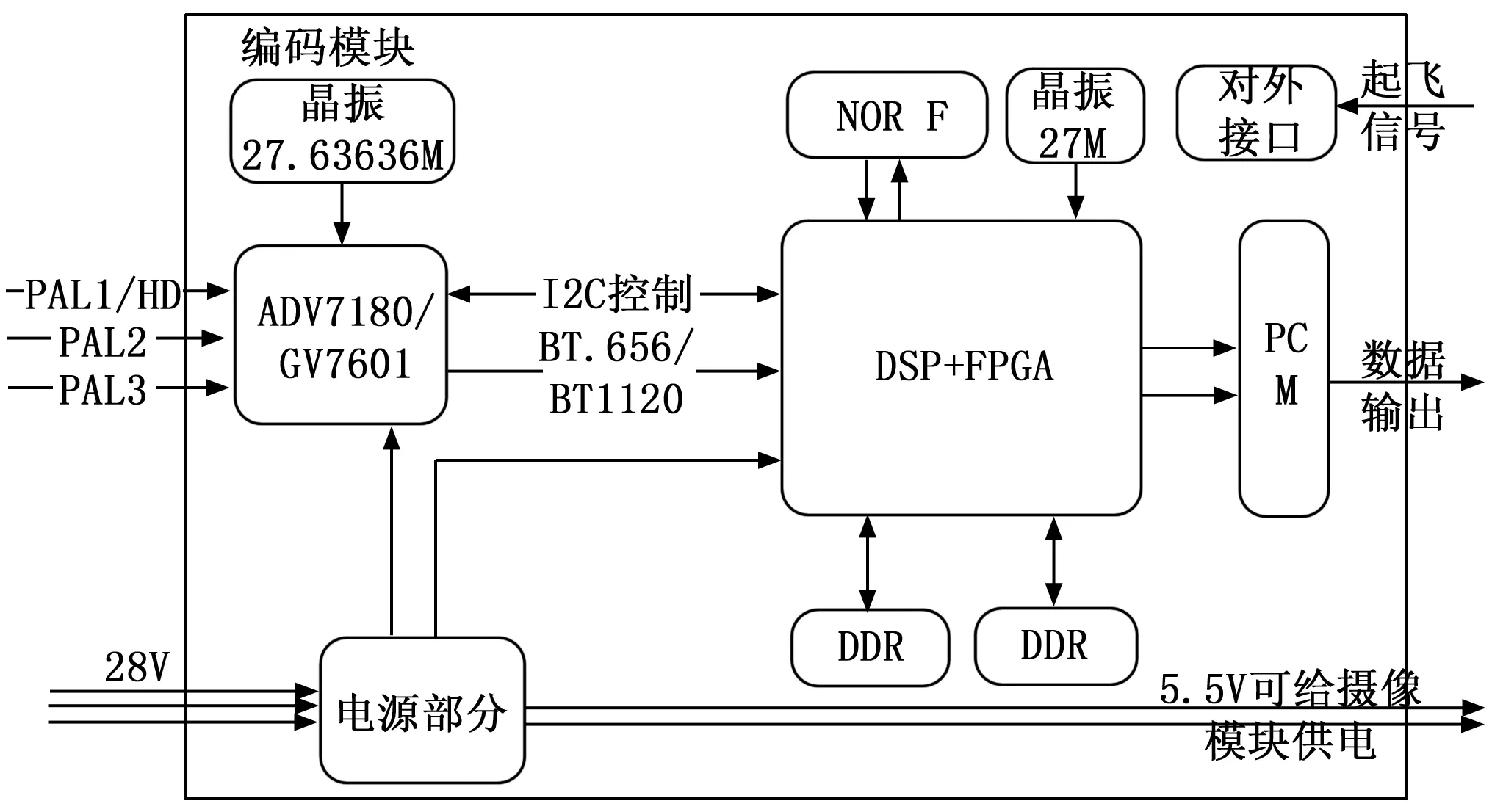
图5 图像压缩编码器原理框图
2.2.1 信号处理硬件
图像压缩编码器主要完成复合视频选通及A/D变换、动态视频的H.264编码、RS编码、数据组帧等功能。其数据流图如图6所示。
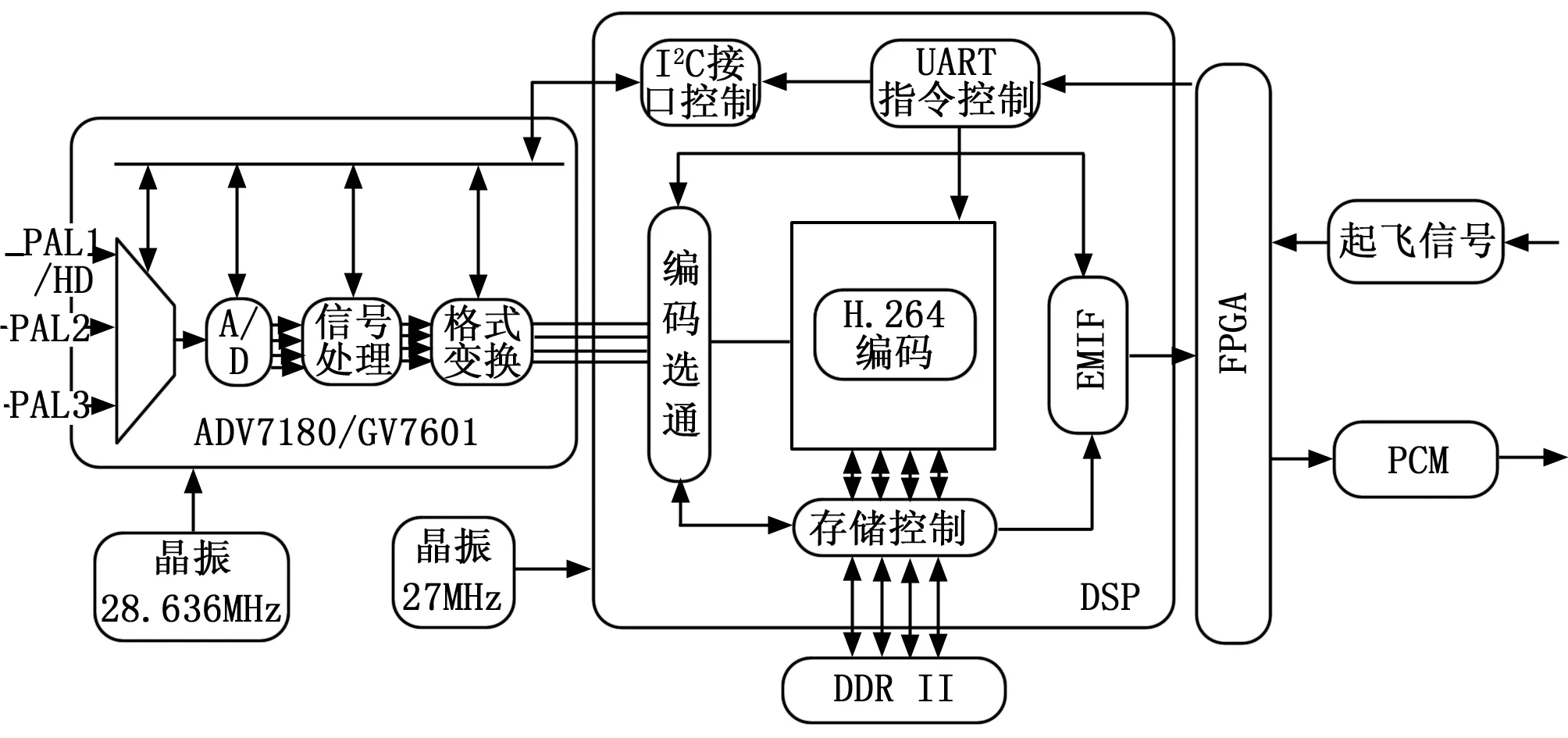
图6 图像压缩编码器数据流图
图像压缩编码器接收摄像机输出的复合视频模拟信号,在进入DSP编码前需要对该模拟信号进行A/D转换。同时转换后的数字信号必须是H.264压缩编码所规定数字视频码流,所以对于A/D后的数据还需要进行相应数字视频帧格式化处理。
复合视频A/D转换及数字视频帧格式处理选用ADV7180芯片实现。对于外部输入的模拟视频,可以自动识别NTSC制式、PAL制式,并将此标准的模拟基带视频信号转换成符合ITU-R BT656接口标准的4:2:2的分量视频数字信号。主要由前端数据选通和A/D转换部分、数据处理部分及数据输出部分组成,DSP通过I2C接口实现对ADV7180的寄存器控制。模拟信号通过滤波器后进行选通,将选通后的模拟视频信号送入ADC,再由ADC将模拟视频信号转换成数字信号;该数字信号进入信号处理部分,自动进行色调、色饱和度和亮度调整并进行亮色分离;最后通过数据输出部分将经过处理的数字信号进行相应的格式变换,产生符合BT.656格式的视频数据。通过缓冲区后在P7-P0口进行输出。
图像数据编码由DSP完成,选用TI公司C6000系列的DSP6467。该DSP可以完成对ADV7180的寄存器访问控制、图像数据编码及数据输出等一系列功能。带有视频处理子系统Video Processing Subsystem(VPSS),包括两路用于视频采集的VPIF输入。图像数据编码采用H.264编码算法,H.264具有比以前各种标准更好的压缩效率,可使传输带宽降低到原来的1/4。H.264编码在帧内预测编码、帧间预测编码、隔行编码、变换编码、去块效应滤波、系数扫描方式、熵编码、差错恢复工具等方面都进行极大改进,有效提高编码效率。H.264支持YUV 4:2:0格式、YUV 4:2:2格式的数据输入。设计中采用YUV 4:2:2格式图像输入格式。
DSP实现动态图像压缩功能,通过调用FPGA内的各子模块完成与外部信号的接口连接,读取压缩图像数据,进行RS编码,完成图像数据组帧的功能,输出PCM流到发射机。
2.2.2 软件设计
软件结构图如图7~8所示。
图像压缩编码器中DSP软件主要完成视频AD转换芯片ADV7180送出的BT656格式的视频输出,调用H.264视频编码库完成视频压缩编码,完成后送FPGA。另外接收遥控指令,进行动态压缩编码切换。主要包括复合视频AD转换模块、初始化控制程序模块、视频编码模块。

图7 图像压缩编码器DSP软件结构图
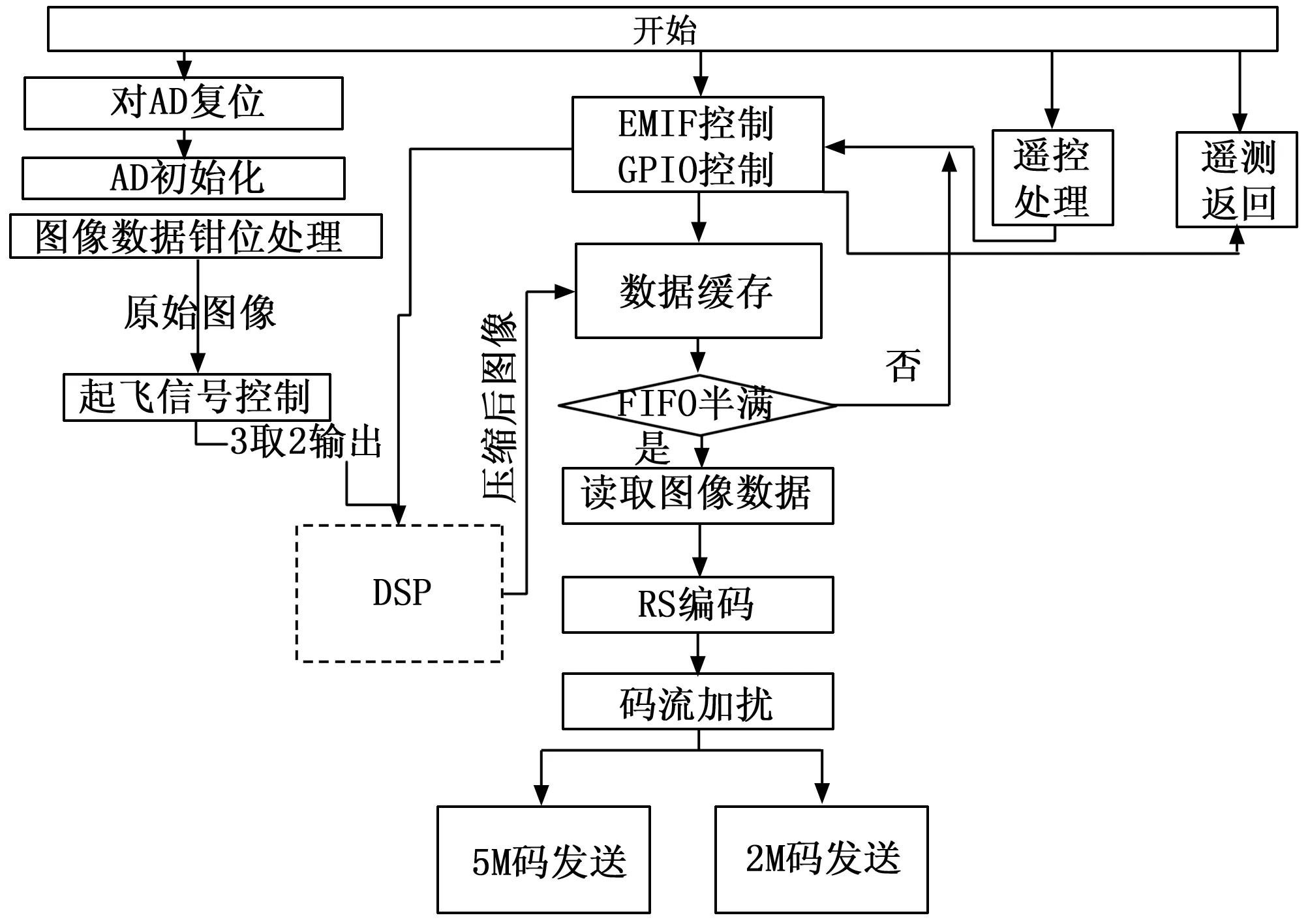
图8 图像压缩编码器FPGA软件流程图
图像压缩编码器FPGA软件主要完成整个系统与外部信号的接口控制、RS编码、数据编帧。FPGA作为系统的协处理器,对DSP和其他器件进行复位,对DSP程序进行控制,按照传输协议对DSP编码数据进行采集,按照中心程序单元时钟要求对图像编码数据进行传输。
3 试验结果与分析
图像测量系统参加运载火箭总装总测厂房某型号Y47火箭全箭集成综合试验以验证系统的有效性。集成综合试验是运载火箭出厂前箭上和地面各个电气系统的一次大型匹配试验。地面采用一体化测发控系统进行测试,箭上参试系统包括控制、推进剂利用、遥测(含图像测量系统)、外测安全和动力(姿控发动机)系统。图像测量系统参加此试验,可验证图像测量系统与遥测系统等箭上产品之间工作的正确性、协调性和匹配性;验证图像测量系统箭上设备工作的正确性、协调性和匹配性;验证图像地面解码设备软解及硬解解调画面的正确性和有效性;检查图像测量系统与其他系统的同时工作的干扰情况。
图像系统箭上设备:摄像机、图像压缩编码器、发射机、天线及设备间的连接电缆,按照箭上设备安装要求安装到箭体各个舱段。图像地面测试设备:接收天线、低噪声功率放大器、天线驱动机构、接收机、遥测解码计算机、以太网交换机、图像地面解码设备、视频显示器,固定摆放在厂房设备测试间。图像测量系统的加电时间、顺序依据电气系统总测试流程进行,按照控制系统、推进剂利用系统、外侧安全系统、遥测系统(含图像测量系统)依次加电,进行模拟发射程序验证。图像测量系统加电后,地面接收天线接收箭上射频设备下传的无线信号,经馈源、低噪声功率放大器、功分器、自动增益控制、接收机、视频综合处理单元、遥测地面处理软件,将图像全帧数据挑好后通过以太网交换机以UDP方式传送给图像地面解码设备。图像地面解码设备有两种解码方式,分别为软件解码和硬件解码。图像地面解码设备接收到遥测地面处理软件转发的全帧数据,一部分送到硬件解调卡,解调出2路PAL制式信号,传送到支持PAL-D格式的标清显示器实时显示采集图像,未启动前显示标准彩条自检信号;一部分通过软件进行解码,利用H.264图像压缩编码算法以及RS交错码原理进行解调处理,实时显示采集画面。
图9显示解码画面为未进行RS编码的测试画面,左边为硬件解码显示器显示画面、右边为软件解码显示画面。整个试验期间,硬件解码画面多次出现花屏、软件解码画面多次出现马赛克、卡顿现象,监测图像点频数据无线信号频谱特性,信号增益较差,调整天线方位无改善,查看源码数据,帧同步错位较多,导致图像压缩编码算法帧内预测和帧间预测出现错误叠加,出现解调画面问题。总装总 测厂房里停放箭体较多、工装设备较多,容易产生信号多 径效应,造成图像无线信号弱、信道增益不强、容错性差。 图像压缩编码器增加RS编码算法模块,地面解码设备增加 RS解码模块,通过集成综合试验项目其余项目测试,全程 解调画面清晰、流畅,无此类现象出现。RS编码后的飞行 试验解调的画面如图10所示,全程画面清晰、流畅,关键 过程动作信息均能清晰捕捉到位、试验关注场景均能有效 呈现。试验结果表明RS编码能有效降低信道误码,提高改 善图像解调画面质量。

图9 无RS编码的集成综合试验测试图面
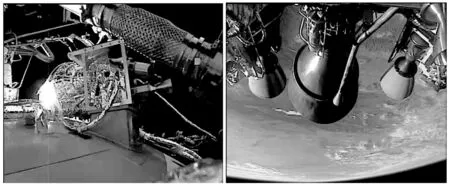
图10 RS编码后的飞行试验画面
4 结束语
为了改善某运载火箭集成综合试验图像测试画面出现马赛克、花屏、卡顿的现象,给出了一种基于RS码为纠错码的图像测量系统设计方案。火箭飞行试验结果表明,RS编码后,能有效降低信道误码、提高信道增益,提升无线信道传输质量,为某型号运载火箭图像测量手段成功应用提供了解决方法。
猜你喜欢
中国石油石化(2022年12期)2022-07-16 08:28:28
中国光学(2021年6期)2021-11-25 07:48:32
中国外汇(2019年19期)2019-11-26 00:57:32
家庭影院技术(2018年11期)2019-01-21 02:20:50
家庭影院技术(2018年11期)2019-01-21 02:20:48
中国医疗设备(2019年1期)2019-01-15 12:10:54
测控技术(2018年7期)2018-12-09 08:58:46
光学精密工程(2016年4期)2016-11-07 09:05:39
激光与红外(2015年10期)2015-03-23 06:07:18
电测与仪表(2014年11期)2014-04-04 09:21:20