
机车多独立轮牵引力总量协调控制方法
2018-11-22 02:23湖南工业大学电气与信息工程学院
电子世界 2018年21期
湖南工业大学电气与信息工程学院 聂 睿
针对机车多独立轮系统在正常运行过程中,某轮牵引电机由于故障导致牵引力发生损失的情况,提出牵引力总量协调控制方法。首先,构建了多独立轮牵引总量协调控制框架;然后,利用二阶滑模控制器控制每台电机磁链及输出转矩,并通过重构控制分配器,协调各牵引个体动力冗余,使牵引总量实时跟踪设定值;最后,通过仿真实验验证所提方法的准确性。
1 引言
独立旋转车轮转向架因取消了左右两车轮之间的机械耦合,可有效降低轨道车辆车厢的地板高度,减少因线路激扰输入而引起的振动和噪声,降低轮轨之间的相互作用力,对改善机车运行安全性能具有重要意义,已在轻轨车辆上得到广泛应用。如ADtranz公司的Eurotram、Incentro和Variotram转向架Skoda公司的ForCity转向架等均采用独立旋转车轮。
目前对独立旋转车轮的研究大多集中在导向控制方面,国内外学者采用电气、液力、磁力等方式将独立车轮通过“无形的轴”再次耦合起来,形成耦合轮对,以解决独立轮本身不具备的从偏斜位置复位和曲线上趋于径向的能力,并获得了一些有益的经验。改善机车独立轮导向性能是避免轮轨磨耗、确保安全运行的基本条件,而维持机车多独立轮牵引力总量恒定是提升机车运行品质的重要保障(任毅,李芾,黄运华.独立旋转车轮动力学性能研究[J].铁道机车车辆,2008,28(6):15-19)。然而,由于机车运行环境复杂多变,常存在一些影响机车正常运行的潜在故障,如机车由干燥轨面向潮湿轨面突变时,机车粘着系数会急剧下降,可能导致某轮对发生空转等破坏正常粘着运行的状况发生,导致该轮提供的牵引力难以和其它车轮保持一致。一旦某车轮牵引力发生变化,不可能在短期内进行修复,而机车的正常运转需要恒定的牵引力总量进行维持,这就需要研究牵引力总量恒定下的多独立轮牵引力协调分配方法,以最大限度的发挥各牵引电机的牵引作用。
目前,在机车牵引力总量一致性控制方面,并未发现公开发表的相关参考文献。项目组成员做了开拓性的探索,提出了基于终端滑模控制的总量一致性控制方法,将总量一致化控制问题转化为有限时间内的误差收敛问题(Zhang C F,Lin Z,Yang S,et al.Total-Amount Synchronous Control Based on Terminal Sliding-Mode Control[J].IEEE Access,2017,PP(99):1-1)。然而,现有的工作仅是总量一致性控制方面的一种尝试,不仅未考虑各子系统输出量之间的协调分配,也未考虑子系统内部的闭环控制,易造成系统跟踪目标过程中的工况波动频繁问题。
本文以低地板列车广泛使用的多独立轮牵引系统为研究对象,针对部分独立轮故障难以满足列车正常运行对牵引总量需求的问题,提出机车多独立轮牵引力总量协调控制方法。该法利用二阶滑模控制器控制每台电机磁链及输出转矩,通过重构控制分配器,协调各牵引个体动力冗余,使牵引总量实时跟踪设定值。
2 多独立轮牵引系统
机车多独立轮牵引系统的每个车轮由各自的牵引电机独立驱动,以四电机驱动转向架为例,其基本系统平面结构如图1所示。二次悬挂安装于转向架和车体之间,用于调节机车运行舒适度;一次悬挂安装于转向架和轮对之间,用于维持机车运行稳定性和转弯性能;轮对上方装有转向辅助装置,为机车主动转向提供帮助。
四电机驱动转向架上配置四台永磁电机,每个车轮由各自的电机独立驱动。电机产生扭矩,通过能量转换和传动装置,作用于机车动轮上,通过车轮与钢轨的作用过程形成牵引动力,机车运行所需的牵引力正是由分散分布的多个牵引电机通过转向架将牵引动力共同作用于机车实现的。机车正常平稳运行时,机车微机与网络控制系统在收到司控手柄指令后,首先计算需要的牵引总量,然后将该牵引总量均分至各牵引电机,使各电机运行工况一致(高健,赵明元,梁斌.HXD2型大功率交流传动货运电力机车微机网络控制系统[J].机车电传动,2008(4):8-12)。然而,由于机车运行环境的复杂性,牵引电机有时并不能按照给定的指令发挥应起的作用,如机车车轮发生打滑或空转等故障时,该车轮将失去牵引作用,难以维持机车运行所需的牵引动力总量,易导致蛇形运动等问题的发生,机车牵引总量一致下的多独立轮牵引动力协调控制方法显得尤为重要。
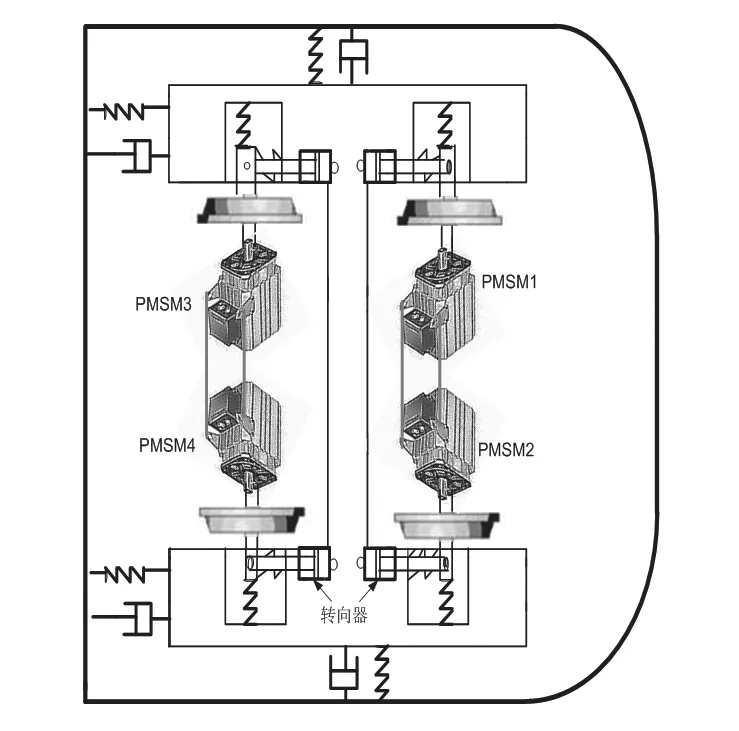
图1 四电机驱动转向架平面结构图
3 系统框架
机车多独立轮牵引力总量协调控制就是针对某轮发生故障不能产生牵引作用时,协调其它正常轮的牵引动力冗余,以使各电机向机车提供的牵引动力总量维持不变,其总体框图如图2所示。

图2 机车多独立轮牵引总量协调控制框架
在如图2所示的机车多独立轮牵引总量协调控制框架中,各 独立轮牵引电机与滑模控制器构成多个独立牵引闭环子系统,以提高各牵引电机的转矩跟踪能力和动态响应速度。重构控制分配器综合各牵引电机转矩输出,以总量的形式与参考转矩进行对比,并依据各电机的实时转矩输出状态,充分利用未发生故障牵引电机的牵引作用,将所需的牵引总量对各牵引电机进行重新分配,以确保各电机输出转矩总量在有限时间内与参考指令Te*保持一致。即:

其中Te*为设定的参考指令,Tem为第m台电机的输出转矩。
3.1 永磁同步电机系统数学模型
随着机车转向架安装空间限制对牵引电机提出的小体积要求,以及列车运行高速化对牵引电机提出的轻量化、高功率需求,永磁同步电机在轨道交通牵引系统中获得了广泛应用,并表现出较好的大启动转矩、宽平滑调速等特性。阿尔斯通的AVG高速动车组与Citadis型低地板轻轨车辆、西门子的EC04轻轨车、日本东芝的E954/E955与AC系列机车等牵引系统中均采用永磁同步电机。同步旋转d-q坐标系下的表贴式永磁同步电机矢量数学模型可表示为(田淳,胡育文.永磁同步电机直接转矩控制系统理论及控制方案的研究[J].电工技术学报,2002,17(1):7-11;童克文,张兴,张昱,等.基于新型趋近律的永磁同步电动机滑模变结构控制[J].中国电机工程学报,2008,28(21):102-106):

式中,Rm为第m台电机定子电阻;urm为定子电压空间矢量;ωem为电角速度;irm为定子电流空间矢量;Ψrm为定子磁链空间 矢量;Ψfm为永磁体磁链;Lrm为定子电感。
d-q坐标系下定子磁链空间 矢量方程为Ψrm=Ψdm+Ψqm。
当定子磁链矢量方向与 d轴一致时(张晓光,孙力,赵克.基于负载转矩滑模观测的永磁同步电机滑模控制[J].中国电机工程学报,2012,32(3):111-116),有:

电磁转矩Tem可表述为:

其中,P0m为电机极对数。
通常可认为永磁体磁链Ψfm不变,故可知:

因此,式(2)和(4)共同构成了d-q坐标系下的永磁同步电机的矢量方程。
3.2 基于Super-Twisting算法的滑模控制器设计
考虑单输入单输出非线性系统:

其中,x∈Rn为系统的状态变量,u∈R为系统的控制量,h(x)为输出函数,f(x),g(x)为光滑的不确定函数。对h(x)进行连续求导有:

传统直接转矩控制中的磁链控制器和转矩控制器通常采用滞环调节器,会引起转矩脉动问题,为改善传统直接转矩控制的性能,设计一种基于螺旋算法的变结构直接转矩控制器。

其中Kp,Ki>0,为待设计参数;
对于转矩控制器,定义转矩误差为STe= Te— Te*

采用此方法设计磁链和转矩控制器,来实现对多电机系统的控制,分别独立选取关于磁链和转矩的滑模变量,通过该算法设计二阶控制率,不仅使电机系统具有很强的转矩跟踪能力,而且保留了一阶滑模控制器的高精度,对内部参数变化和外部扰动具有强鲁棒性的优点。
3.3 基于加权最小二乘的牵引力重构控制分配器设计
控制分配是在考虑执行器约束的条件下,将虚拟控制指令最优分配到各个执行器上,当执行器故 障而失效时,故障诊断模块(FDI)能及时检测出系统状态,实现控制重分配,即重构控制。因此,该方法能实时解决执行器失效的突发状况,提高牵引系统的稳定性及可靠性(郭玉英,姜斌.执行器故障的多模型自适应重构控制(英文)[J].自动化学报,2009,35(11):1452-1458)。重构控制分配结构图如图3所示。

图3 重构控制分配结构图
控制分配问题可以归结为:

式中:v为虚拟控制指令矩阵,u为控制输入矩阵,B为控制分配矩阵,umin,umax分别为u的上下限矩阵。
假设故障信息ki已通过车载FDI系统获得,设系统性能指标J:
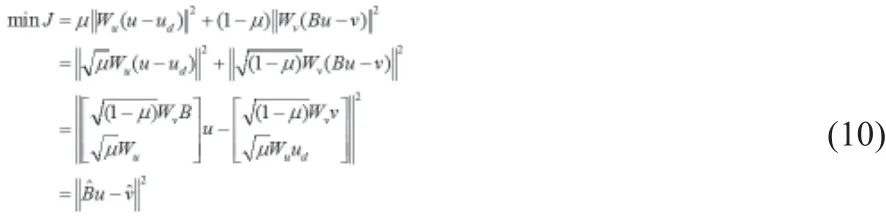
最终控制分配问题可以转变为:
其中u =(Fx1,Fx2,Fx3,Fx4)T为各电机所需分配的牵引力,且u 满足约束条件umin≤u≤umax,并期望牵引力改变量ud为0;μ为拉格朗日系数,可由最小二乘算法自动求解;wu,wv分别为牵引力Fxi和电流ixi的加权矩阵:

通过调用Matlab工具箱对式(10)进行求解,仿真结果如图4,5所示。
4 系统仿真
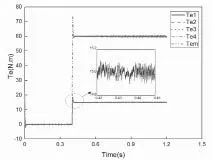
图4 滑模控制器算法仿真

图5 牵引总量协同控制仿真
5 结论
(1)考虑多独立轮牵引系统中部分轮故障难以满足列车正常运行对牵引总量需求的问题,提出机车多独立轮牵引力总量协调控制方法。
(2)利用二阶滑模控制器控制每台电机磁链及输出转矩,并通过重构控制分配器,协调各牵引个体动力冗余,使牵引总量实时跟踪设定值。
(3)最后,通过仿真实验,验证了本文所提出的机车多独立轮牵引力总量协调控制方法的可行性,可为机车实际工程应用提供理论指导。
猜你喜欢
哈尔滨铁道科技(2020年3期)2021-01-18
自动化学报(2017年4期)2017-06-15
中学生数理化·高一版(2016年4期)2016-11-19
物理与工程(2016年3期)2016-08-31
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
学习月刊(2015年1期)2015-07-11
电网与清洁能源(2015年2期)2015-02-28
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年22期)2014-04-04
