
交流调速矢量控制策略
2018-11-22 02:23北京昊华能源股份有限公司安全监察部李德臣
电子世界 2018年21期
北京昊华能源股份有限公司安全监察部 李德臣
0 引言
交流感应电机由于其固有的良好鲁棒性还有其形成的可靠驱动部件,在工业生产中成为比较常用的一种电机。三相交流感应电机具备多种优势,如成本较低,结构简单、运行稳定、易于使用、维护方便等,因此研究三相交流感应电机控制策略有着重要的意义。
矢量控制基本思想是通过静止和旋转坐标系变换,在按转子磁链定向同步旋转正交坐标系中,得到直流电动机的等效模型,这样矢量调速系统就相当于直流调速系统。于是矢量控制的交流变压变频调速系统在动态和静态性能上可以同直流调速系统达到相同的控制效果。
本文利用矢量控制策略对交流电机进行控制,并在Simulink中建立仿真,验证了建模和控制策略的可行性与有效性。
1 矢量控制原理
以形成相等旋转磁动势作为目标,三相静止坐标系下的定子电流iA、iB、iC通过3/2(Clarke)变换,便可以转化成两相静止坐标系里交流电流iα,iβ,再以转子磁场定向的Park变换,可以转换成旋转坐标系里的直流电流im、it。假若参考方向为坐标系和铁芯同时旋转,交流电机就可以看成一台直流电机。所以通过控制,便可以将交流电机的转子磁通看作是直流电机的励磁磁通,则M绕组看作是直流电动机的励磁绕组,im看作是励磁电流,T绕组看作是静止的电枢绕组,it看作是与转矩成正比的电枢电流。
图1是上面所述的等效关系结构图。从输入输出来看,输入是iA、iB、iC三相电流,输出是转速ω的三相交流电机。以局部来观察,经过3/2变换和旋转变换,则可以看成输入为im和it,输出为ω的直流电机。

图1 异步电动机的坐标变换结构图
由于三相交流感应电机通过坐标变换过后可以看作是直流电机,这样的话便可以使用直流电机的控制策略,从而得到直流电机相关控制量,再将这些控制量通过旋转到三相静止坐标反变换,于是便可以控制交流感应电机了。因为进行坐标变换的是空间矢量,所以这种使用坐标变换实现的控制系统就叫作矢量控制(Vector Control)。
2 按转子磁链(磁通)定向的数学模型

图2 按转子磁场定向的物理模型
2.1 电压方程

异步电动机在MT同步旋转坐标系上的电压方程为:

式(3)是由转子磁链轴线定向的旋转坐标系下的电压方程,称为磁场定向方程式,约束条件为。根据上述电压方程能够建立矢量控制系统所依据的控制方程。
2.2 转矩方程
三相异步电机在旋转坐标系下的转矩方程为:

式(4)能够看出,在旋转坐标系下,假若按照异步电机转子磁链定向,就会有异步电机电磁转矩数学模型就和直流电机电磁转矩数学模型相同。
2.3 按转子磁链(磁通)定向的控制方程
在动态模型分析过程中,对同步旋转坐标进行变换时,只对d、q轴的相互垂直关系和定子频率同步的旋转速度进行规定,并没有对两轴和电机旋转磁场的相对位置进行规定。假若使d轴和转子总磁链矢量方向一致,记作M轴,这时q轴相当于是逆时针转90°,即垂直于矢量,记作T轴,由此得到的两相同步旋转坐标系就记作M、T坐标系,也称之为按转子磁链定向的旋转坐标系。
旋转角速度与转子之差定义为转差角频率为:

转子磁链的表达式为:

由式(6)看出,转子磁链仅与定子电流励磁分量ism相关,和转矩分量不相关,由此可以看成定子电流的励磁分量与转矩分量是解耦的。
式(6)同样能够看出,与之间的关系为一阶惯性传递函数,式中的是转子磁链励磁时间常数,假若励磁电流分量变化时,同样会受到励磁惯性的影响,这种影响和直流电机的励磁绕组的惯性作用相似。
2.4 在磁场取向上二相旋转坐标系的转子磁链观测器
定子电流iA、iB、iC经Clarke变换形成两相静止坐标系下的电流isα和isβ,然后经旋转变换并按转子磁链定向形成m、t坐标系下的电流和,利用方程式(5)和(6)求得和ωs,再让ωs与实际转速ω求和得出定子频率ω1,然后再积分得到转子磁链的相位角ϕ,即为旋转变换的旋转相位角。这种方法适合用于数字处理器的计算,收敛性好,准确度较高。
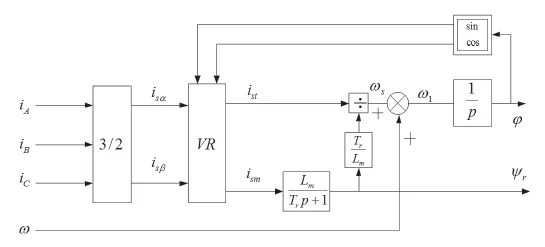
图3 旋转坐标系下转子磁链的电流模型
3 异步电动机矢量控制系统
按照图4控制系统结构建立仿真模型,由于磁链对控制目标的影响相当于一种扰动,转矩内环的作用能够抑制这个扰动,所以转矩内环有助于解耦,因此改造转速子系统,使其尽量不受到磁链变化的影响。转速调节器ASR的输出用于转矩信号的指令,弱磁时它也受到指令磁链信号的控制。

图4 转速磁链闭环(带转矩内环)矢量控制系统

图5 异步电机MATLAB仿真图
4 异步电机矢量控制MATLAB仿真
电机的参数设置为:电动机380V、50Hz、二对极,Rs=0.435Ω,Lls=0.002mH,Rr=0.816Ω,Llr=0.002mH,Lm=0.069mH,J=0,19kg●m2。逆变器直流电源为510V。
图5所示是MATLAB仿真。
仿真结果如图6-7所示。

图6 转速n

图7 转矩Te
5 结论
本文参考相关文献后建立交流异步电机矢量控制系统的数学模型,然后搭建SIMULINK仿真模型,验证了本文所提控制策略的正确性和有效性。合理的选取调节器参数和其他控制参数后,进行仿真实验。系统仿真实验结果表明:该系统得具有良好的动态性能,即系统的动态响应快,超调量小,抗干扰能力强,对给定的指令值具有良好的动态跟踪能力,使电机获得了较好的调速性能,达到了所提控制策略的预期效果。
参考:李德华,交流调速控制系统:电子工业出版社,2003;李永东,交流电机数字控制系统:机械工业出版社,2002;马小亮,高性能变频调速及其典型控制系统:机械工业出版社,2010;阮毅,陈伯时,电力拖动自动控制系统——运动控制系统:机械工业出版社,2013;邢绍邦,现代交流调速系统中的磁链观测与SVPWM技术研究:青岛大学,2007;杨梦晗,交流感应电机矢量控制及MATLAB仿真:吉林大学,2014;朱佳,基于DSP的三相交流电机的矢量控制系统的理论研究及仿真:武汉理工大学,2009;贾瑞,康锦萍,基于Matlab/Simulink的异步电机矢量控制系统仿真:华北电力技术,2011;韩会山,陈龙,程德芳,异步电机矢量控制系统的设计及仿真研究:计算机仿真,2012。
猜你喜欢
大电机技术(2022年5期)2022-11-17
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
电子制作(2017年1期)2017-05-17
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04
