
四旋翼飞行器建模、仿真与PID控制
2018-11-22 02:23北京航空航天大学自动化科学与电气工程学院陈听雨
电子世界 2018年21期
北京航空航天大学自动化科学与电气工程学院 陈听雨
四旋翼是一种实用的无人飞行器。本文首先对四旋翼进行了动力学分析,在其基础上建立了四旋翼的数学模型。在对模型进行化简后,设计了飞行控制系统,并将控制系统拆分为内环姿态控制与外环位置控制,分别设计了PID控制率对其进行控制。最后在Matlab/Simulink中搭建了完整的四旋翼飞行控制仿真模型,并对模型与控制率进行了仿真验证。
1.引言
四旋翼飞行器是一种能实现垂直起降的非共轴式多旋翼飞行器(李俊,李运堂.四旋翼飞行器的动力学建模及PID控制[J].辽宁工程技术大学学报(自然科学版),2012,31(1):114-117)。小型四旋翼飞行器具有四个螺旋桨,并且螺旋桨呈十字交叉结构的旋翼式飞行器,它通过调整四个电机的转速来实现俯仰、横滚、偏航等飞行动作,并具有可悬停、机动性好、结构简单等优点(江杰,岂伟楠.四旋翼飞行器建模与PID控制器设计[J].电子设计工程,2013,21(23):147-150)。

图1 四旋翼飞行器
与固定翼飞行器相比,四旋翼控制相对简单,只需调节其四个旋翼转速即可实现对四旋翼飞行姿态的控制。为使得四旋翼能够按照设计的姿态与轨迹进行飞行,必须首先对四旋翼进行建模,然后根据得到的模型设计飞行控制系统并进行仿真验证。因此,对四旋翼进行建模,在此基础之上设计合理的控制率,并进行仿真验证是四旋翼实现各种姿态与路径飞行的关键。目前,四旋翼的控制方法主要有反步控制、H∞控制与滑模控制等(王树刚.四旋翼直升机控制问题研究[D].哈尔滨:哈尔滨工业大学,2006;聂博文.微小型四旋翼无人直升机建模及控制方法研究[D].长沙:国防科学技术大学,2006;王丽新.基于滑模理论的四旋翼直升机的姿态控制研究[D].沈阳:东北大学,2009)。
本文对通过对四旋翼进行动力学分析,建立了四旋翼的动力学模型,并对其进行了化简。根据化简的模型,使用PID控制方法设计了四旋翼飞行控制率,并在Matlab/Simulink中对其进行了仿真验证。
本文共分为四个部分,第一部分对四旋翼与本文目的进行了简述,第二部分简要介绍了四旋翼动力学建模与简化的内容,第三部分完成了对四旋翼模型的仿真、PID控制率设计与验证,第四部分对全文进行了总结,并提出了未来工作的重点方向。
2.四旋翼动力学建模与简化
2.1 基本假设与坐标系变换
正常情况下,四旋翼飞行器结构呈X型。

图2 四旋翼飞行器结构
在为四旋翼建模之前,为简化模型分析,抓住主要矛盾,忽略次要矛盾,提出以下七点假设:
(1)四旋翼飞行器是刚体,在其飞行过程中质量保持不变;
(2)地面坐标系视为惯性坐标系;
(3)地球表面是平的,且忽略地球自转与公转;
(4)重力不随高度变化而变化;
(5)四旋翼飞行器形状与质量是关于中心对称的(吴森堂,费玉华.飞行控制系统[M].北京:北京航空航天大学出版社,2005:46-47);
(6)四旋翼低速飞行时忽略空气摩擦力;
(7)四旋翼进行低速小角度飞行。
首先为四旋翼建立合适的坐标系。

图3 地面坐标系与机体坐标系
其中,地面坐标系定义如下:选取地面上的一点,即四旋翼至地球中心连线与地面的交点,定义X轴指向水平正东方向,Y轴指向水平正北方向,Z轴垂直于XOY平面,指向天空,即与重力方向相反。
机体坐标系定义如下:由于四旋翼在形状上关于中心对称,因此四条机臂是等价的。选取Xb轴指向其中一条机臂的方向,Yb轴指向逆时针转过90°,与Xb轴垂直的另一条机臂的方向,Zb轴垂直于XOY平面,指向四旋翼飞行器上方。
为确定四旋翼姿态,分别定义欧拉角如下。
●滚转角φ:在YOZ平面的投影与OY的夹角
●俯仰角θ:在XOZ平面的投影与OZ的夹角
●偏航角ψ:在XOY 平面的投影与OX的夹角
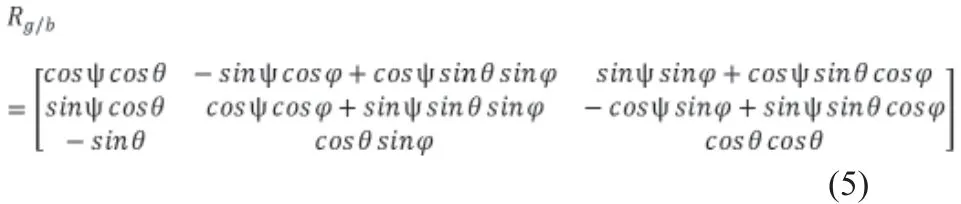
从机体坐标系变换至地面坐标系的转换矩阵记作Rg/b,需要经过三次欧拉旋转获得(许喆.四旋翼无人机控制系统的设计与实现[D].南京:南京理工大学,2017):
首先,绕Zb转动ψ角,变换至中间坐标系A,此变换矩阵记作RA/b。

之后,绕转动θ角,变换至中间坐标系B,此变换矩阵记作RB/A。

最后,绕转动φ角,变换至地面坐标系,此变换矩阵记作Rg/B。

可得由机体坐标系变换至地面坐标系的转换矩阵Rg/b。

最终得到Rg/b。
2.2 四旋翼动力学建模
记四个旋翼的转速分别为~,这也是实际的输入的控制量。单个旋翼沿轴正方向的拉力可近似认为与该旋翼转速的平方成正比(米培良.四旋翼飞行器控制与实现[D].大连:大连理工大学,2015)。

其中,f 为升力系数。
容易写出四旋翼在地面坐标系下受到的合力。


同理,可以写出机体坐标系下三个力矩平衡方程(冯培晏.四旋翼无人机建模与PID控制器设计[J].工业设计,2018(6):135-137)。


其中,l为四旋翼机臂长,d为电机反扭矩系数。
可以写出机体坐标系下各轴角速度与四旋翼滚转、俯仰、偏航角速度之间的关系。

根据前文假设,本文研究的情况为四旋翼无人机小角度、低速度飞行,因此可以做如下近似。

即:

通过对进行变换,令:

可得四旋翼飞行器最终模型。

3.四旋翼仿真与控制率设计
3.1 四旋翼模型仿真
根据查阅的文献(李俊,李运堂.四旋翼飞行器的动力学建模及PID控制[J].辽宁工程技术大学学报(自然科学版),2012,31(1):114-117),得到四旋翼模型参数如表1所示。
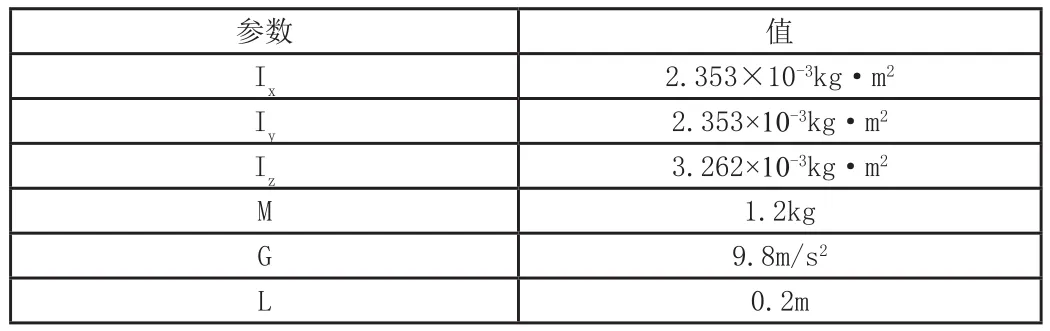
表1 四旋翼模型参数
四旋翼仿真使用Matlab/Simulink完成。仿真模型代码如下:
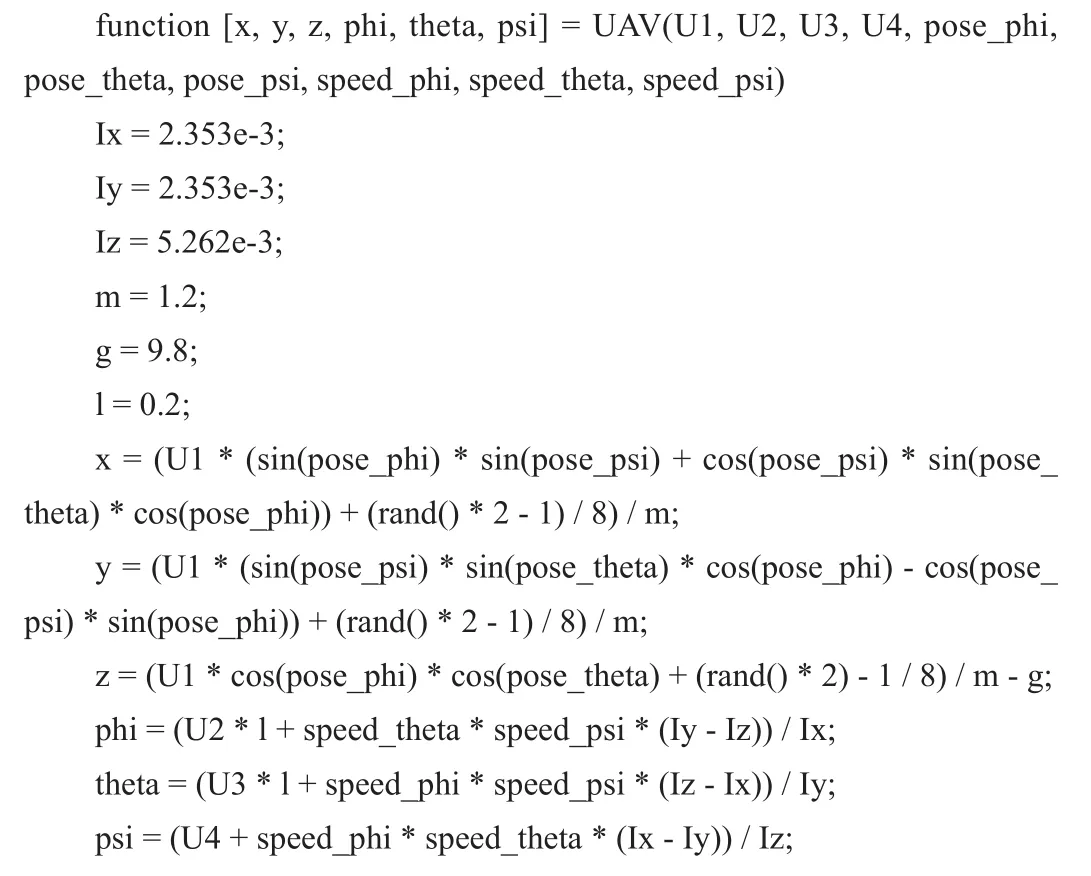
其中,使用rand()函数,生成0~1之间的随机数,以模拟四旋翼受到的扰动。
3.2 四旋翼控制率设计
由四旋翼模型可以看出,其模型有四个输入变量与六个输出变量,属于不完全控制,各变量之间相互之间存在耦合。
在设计控制率时,首先对模型进行化简。由于本文假设四旋翼是在小角度、低速度的情况下进行飞行,因此可以忽略陀螺效应对三轴角速度带来的影响(米培良.四旋翼飞行器控制与实现[D].大连:大连理工大学,2015)。从而得到化简后的模型。
观察化简后的四旋翼模型,可以发现其三个姿态角变量以及高度变量仅与四个输入变量有关,而X、Y轴位置的控制则同时与输入以及姿态角有关(米培良.四旋翼飞行器控制与实现[D].大连:大连理工大学,2015)。四旋翼飞行器的姿态与高度均完全可控。因此,将四旋翼模型拆分成两个子控制系统,内环系统为姿态控制系统,外环系统为位置控制系统。

图4 姿态角控制系统与位置控制系统
系统使用PID控制率进行控制。PID是P(比例)算法与I(积分)算法与D(微分)算法三种算法各种组合的统称。可以选择为PD,PI,单独的P算法等。P(比例)以减少系统稳定性为前提减小系统误差。I(积分)和D(微分)必须和P(比例)控制搭配使用,I(积分)反映系统的累计偏差,使系统消除稳态误差。D(微分)反映系统偏差信号的变化率,具有预见性,从而进行超前控制(冯培晏.四旋翼无人机建模与PID控制器设计[J].工业设计,2018(6):135-137)。

图5 四旋翼控制系统仿真
从系统仿真框图中可以明显看出位置与姿态两个相对独立的字系统。X、Y位置指令首先输入外环控制系统,即位置控制系统,其输出作为内环控制系统,即姿态控制系统的输入控制四旋翼的滚转角与俯仰角。采用先调节内环,后调节外环的策略,调节系统各个PID的参数。最终结果如表2所示。

表2 四旋翼PID控制参数
3.3 四旋翼控制率验证
对控制系统进行测试,令四旋翼在1米的高度按照半径为2的圆轨迹进行飞行,输入如下控制指令。

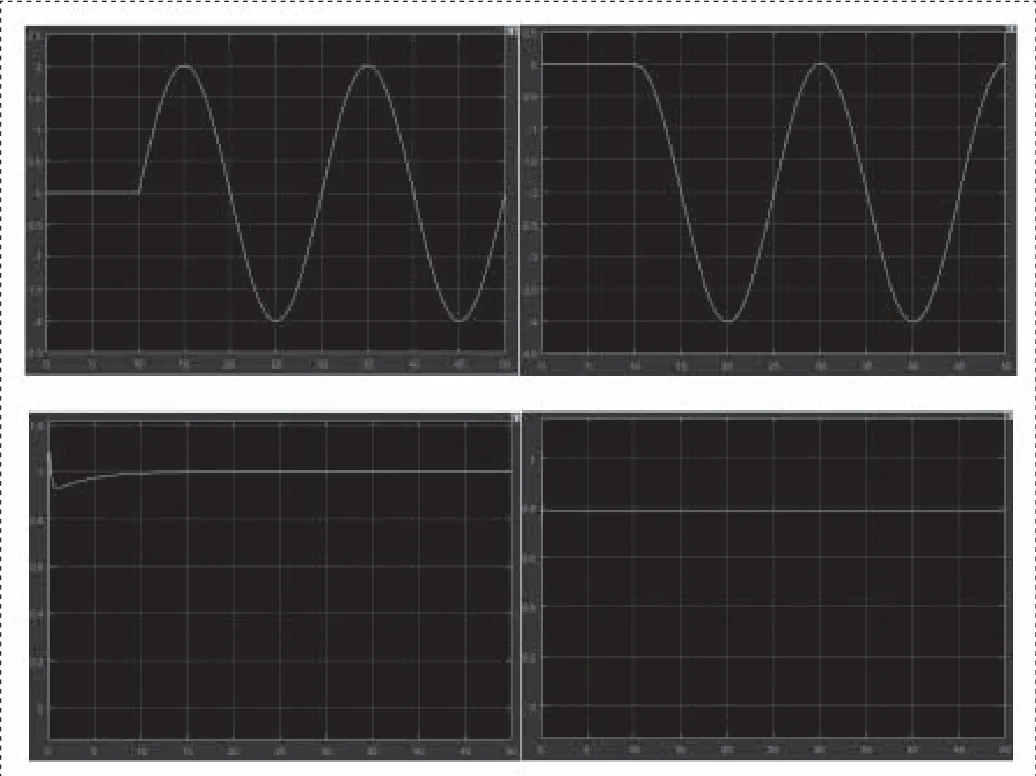
图7 X、Y、Z与φ控制结果仿真
从结果可以看出,PID控制系统对于四旋翼飞行器有较好的控制效果,飞行器可以在具有扰动的情况下,根据指令按照设计的轨迹进行飞行。
4.结语
本文首先对四旋翼飞行器进行了简介,之后对四旋翼进行了建模,并对模型进行了简化,得到了适合控制使用的四旋翼动力学模型。根据得到的模型,本文对该模型进行了仿真,并设计了PID控制率,使得飞行器能够按照指令沿一定轨迹进行飞行,并验证了控制率的正确性。
然而,本文的模型与控制率设计仍然存在不足。对比真实的四旋翼模型,本文的模型过于简单,并没有考虑到许多实际中可能出现的影响因素,如空气阻力等。同时,本文的PID控制率也不适用于在复杂的实际条件下进行飞行。未来的工作将会重点集中于对四旋翼进行精确建模,并采取更加先进的控制方法以实现对四旋翼飞行更好的控制效果。
猜你喜欢
小学生学习指导(高年级)(2022年10期)2022-11-04
北京航空航天大学学报(2021年9期)2021-11-02
茶叶(2021年1期)2021-04-13
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
中学生数理化·七年级数学人教版(2017年3期)2018-01-20
中国医药科学(2017年14期)2017-08-17
中学生数理化·七年级数学人教版(2017年12期)2017-02-15
中学生数理化·七年级数学人教版(2017年12期)2017-02-15
北京航空航天大学学报(2016年8期)2016-11-16
