
群体智能机器人技术的实验建设
2018-11-20 15:05李智师海云
教育教学论坛 2018年47期
李智 师海云

摘要:随着新工科建设的不断推进,培养具有创新创业、数字化思维和跨界整合能力的人才变得迫切,各院校急需加快工程教育改革创新的脚步。为加强学校双一流建设,本文依托于群体智能机器人技术,结合电子信息、自动控制和人工智能等相关专业知识,提出群体智能机器人技术的实验建设,采用翻转课堂等教学方式,鼓励并指导学生完成课程实验方案设计、理论仿真和综合设计等方面内容,加强对具有独立解决问题的复合型人才的培养。
关键词:工程教育;群体智能;机器人
中图分类号:G642.0 文献标志码:A 文章编号:1674-9324(2018)47-0275-02
加快深化工程教育改革、建设新工科是立足我国战略发展需求、国际竞争趋势和立德树人时代要求提出的深刻命题,关系国家未来和民族振兴[1]。以《华盛顿协议》为导向,结合我国工程教育特色所修改的《工程教育认证标准(2015)版》中明确提出了工程教育中毕业要求需要达到的12个指标[2],其中对解决复杂工程问题所对应的各项能力提出了更为具体的要求,具体表现在工程知识的应用、解决方案的设计与开发和团队背景下的合作等。群体智能机器人的研究是一个新兴的研究方向,科技部部长万钢指出,“下一步,要面向人工智能发展新形势,特别是在深度学习关键技术、跨界融合信息技术、人机协同操作和控制、群体智能和开放研究方面下力气”,由此可以看出,基于群体智能研究群体机器人系统是一个具有理论和应用两个方面重要意义的课题。因此,研究智能机器人群体技术,开展相关教学实验,对学生能力和未来就业有重要意义。智能机器人是一个集环境感知、规划决策、自动行驶等功能于一体的综合系统,它集中地运用了计算机、现代传感、控制科学与工程、信息融合、通信、导航、人工智能等技术,是典型的高新技术综合体,智能机器人的实际应用对于从事电子信息相关专业的学生有深远的指导意义。
一、课程设计的必要性
群体智能系统的特性与规律是一个具有理论和应用两个方面重要意义的课题,它的研究与发展将为人工智能领域带来新的活力,提供了解决问题的全新的角度和方法。作为高等院校信息化专业的学生很有必要了解这一方法,了解群体智能系统的相关规律和应用前景。
二、课程内容设计
1.基于多主体仿真平台的BOID模型实现。基于多主体仿真平台对BOID模型进行建模抽象,首先明确简单个体的基本行为,分离、聚合和一致行为。基于上述行为,首先定义单个体的感知半径和视角,选取感知范围内的离自身距离最小的个体执行分离准则,通过获取参照个体方向,当前个体通过转向的形式沿相反方向运动,从而完成分离操作,基于式(1)计算群体平均方向从而实现进行一致操作,汇聚行为基于式(2)进行求解和实施。
通过以上公式得到汇聚方向,个体根据自身方向和汇聚点方向进行调整,完成汇聚规则。
2.基于多主体仿真平台的VICSEK模型实现。该模型基于如下位置变换(3)和速度变换(4)表达式进行协同一致实验。
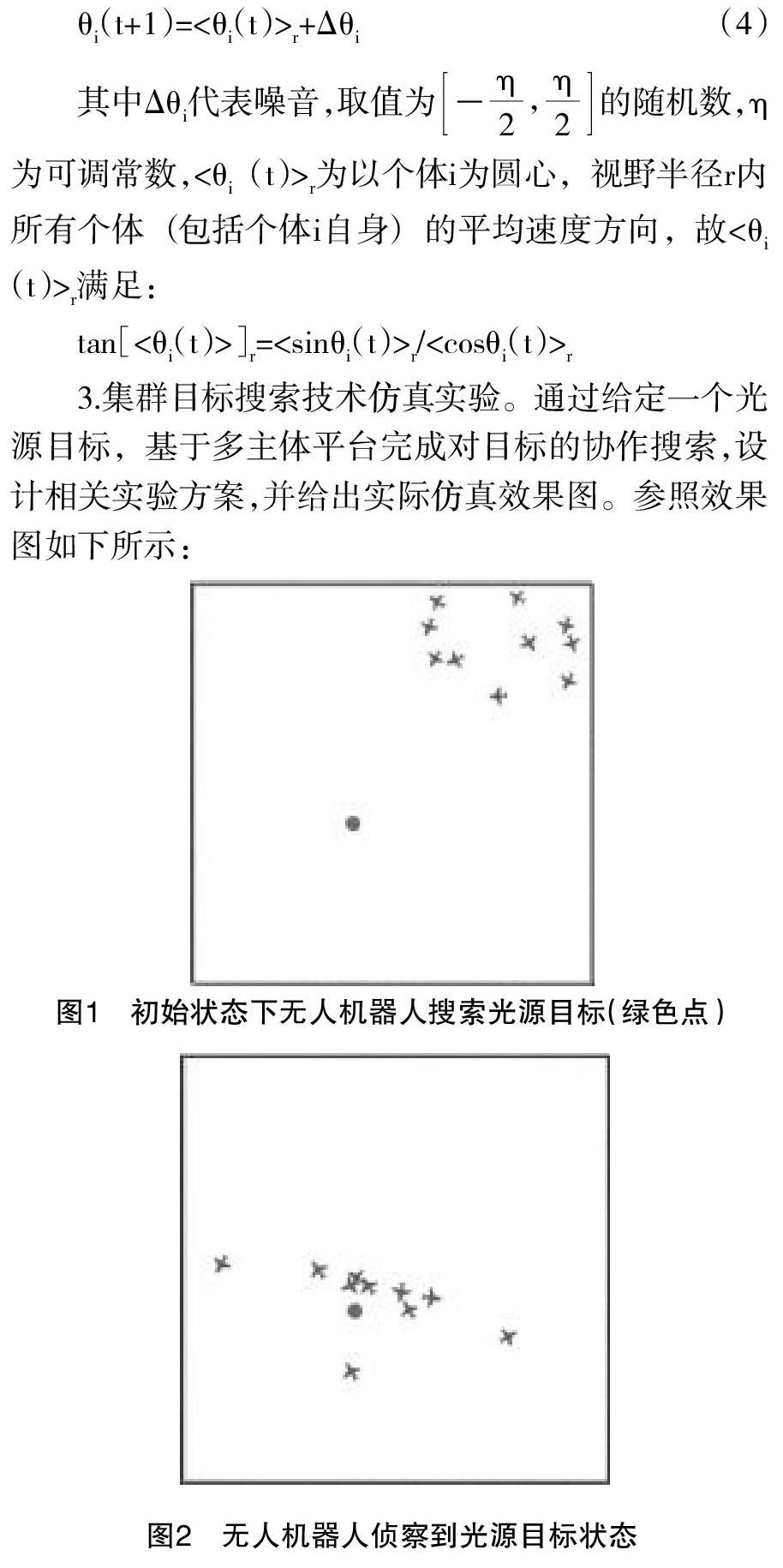
3.集群目标搜索技术仿真实验。通过给定一个光源目标,基于多主体平台完成对目标的协作搜索,设计相关实验方案,并给出实际仿真效果图。参照效果图如下所示:
4.群体技术约束下的智能机器人扩展开发验证实验。基于上述仿真模型,设计实际智能机器人,从传感器选取、硬件电路设计、软件模块实现等方面自行设计解决方案,并进行相应的论证,完成设计报告,经过老师和同学之间的讨论确定方案可行性,最后以可行性方案进行独立设计智能机器人,基于可行性方案进行分工合作,完成2—3个智能机器人的系统实现,最后完成基于光源目标的协同搜索实验,给出最终设计报告等相关资料。
三、可行性分析
理论仿真部分涉及方法模型和支撑平台两部分,其中方法模型采用经典模型BOID、VICSEK进行模型支撑,对于两种模型的建模研究,国内外已经比较成熟,因此方法模型上从技术上来说可行;其次是支撑平台,目前对于多主体平台的仿真工具层出不穷,主要有NETLOGO、REPAST、MASON、SWARM等,仿真工具各具特点,虽然所使用的建模语言不完全一样,但学习资料丰富,语言简单操作难度小,形象直观,因此从支撑平台和操作上来说技术可行。设计实验操作上涉及智能机器人的扩展,搜索算法的实现,其中智能机器人已司空见惯,对智能机器人进行扩展,主要涉及对主控芯片进行外设扩展,包括通信部分、传感器部分等,虽然内容相对较多,但是对于当代高校电子信息专业学生来说难度不大。其次是搜索算法,国内外已有不少研究,依托四川大学图书馆和互联网等平台,发挥主观能动性,所涉及的技术能够在一定时限内掌握完成,因此该部分技术上可行。针对该项目已经开展如下工作:(1)基于NETLOGO的BOID模型仿真。(2)基于NETLOGO的VICSEK模型仿真。(3)基于光源的目標协同搜索(单目标、多目标、运动目标、突发目标)。(4)基于ZIGBEE的多智能车控制系统。因此从技术上该方案可行。
四、结语
本文以工程教育认证为背景,群体智能机器人为依托,提出群体智能机器人技术的实验建设方案,所提出的教学方案能够从工程知识、问题分析、方案设计和执行、团队合作等多方面培养学生的能力和素养,积极贯彻工程教育改革精神,实施理论与实践相结合的全过程参与教学模式,采用先进的技术理论和实验,提高学生的学习兴趣,加强专业素质的拓展。
参考文献:
[1]钟登华.新工科建设的内涵与行动[J].高等工程教育研究,2017,(3).
[2]中国工程教育专业认证协会.工程教育认证一点通[M].北京:教育科学出版社,2015.
猜你喜欢
金桥(2019年10期)2019-08-13
计算机教育(2016年9期)2016-12-21
计算机教育(2016年9期)2016-12-21
计算机教育(2016年9期)2016-12-21
知音励志·社科版(2016年11期)2016-12-20
