基于莱温伯格-马夸特的TDOA测向算法研究
2018-11-20 06:08:50侯东升崔逊学
计算机工程 2018年11期
侯东升,崔逊学
(陆军炮兵防空兵学院 a.研究生管理大队; b.六系,合肥 230031)
0 概述
近年来,随着传感器与通信领域的发展,基于到达时差(Time Difference of Arrival,TDOA)的声阵列定位算法引起了广泛关注。当辐射源距离阵列很远时,人们难以直接通过TDOA双曲线交叉方法精确估计辐射源坐标。但如果在不同位置分散部署多个阵列,便可以利用各阵列所接收到的信号平面波之间的时差来估计波达方向(Direction of Arrival,DOA)[1-2]。该过程计算量小、易于实现,且只要求传感器之间满足严格时间同步,因此,便于在实际中操作与应用[3]。
文献[4]较早提出基于时差的辐射源方向问题,其设计一种线性最小二乘(Linear Least Squares,LLS)测向算法,由3个分量构成的DOA矢量估计可计算出辐射源的方位角和俯仰角。LLS算法具有简捷、易操作的特点,且其提供的解方案是闭式的。
基于时差的测向问题最近得到较多关注,特别是在枪声定位等公众安全领域。如果测向阵列是固定结构,则可通过联合建立若干个TDOA测量方程并利用三角函数关系来求解三维空间中辐射源的方位角和俯仰角[5]。当阵列结构属于不规则拓扑形状时,可采用文献[4]提出的LLS算法来获得DOA估计的闭式解。但 LLS算法的不足之处在于当TDOA测量噪声较大时,会干扰DOA的估计结果,使算法性能下降。
如果知道辐射源现场传播信号的速度参量,例如对于声信号而言,通过测量现场的气象参数,则可计算出实际声速的估计值[6],再结合LLS算法的DOA估计结果,即通过采用一些优化方法可以直接获得辐射源方位角和俯仰角这2个变量的估计值。文献[7]提出采用智能优化方法来搜索得到这2个参变量的估计值,但需人工设置较多参数,不利于工程实现。
有研究结果表明,由多个到达时差测量值构成的测量方程具有非线性的特点,通常需要将其转换为线性方程组后再进行求解。文献[8]提出的泰勒级数展开法(以下简称Taylor算法)对处理非线性方程组十分有效,且操作步骤较易设计,文献[9-10]即提供了Taylor算法的具体过程和步骤。但由文献[11]可知,Taylor算法为局部收敛迭代算法,对初始值要求较高,迭代初始值必须接近于真实值,否则会发生局部最小化现象或者不能保证结果收敛[12]。
针对上述方法存在的问题,本文以声音在空气中传播的测向问题作为应用背景,提出一种基于莱温伯格-马夸特(Levenberg-Marquardt,LM)[13]的测向算法。用LLS算法求出的闭式解作为LM算法的初始方位估计,通过LM算法直接求得辐射源的方位,以进行对声源方位的高精度估计。在实验环节将LLS算法、Taylor算法和本文提出的LM算法进行性能比较,以验证本文LM算法的定位性能。
1 基于时差测向模型
三维空间测向问题示意图如图1所示。
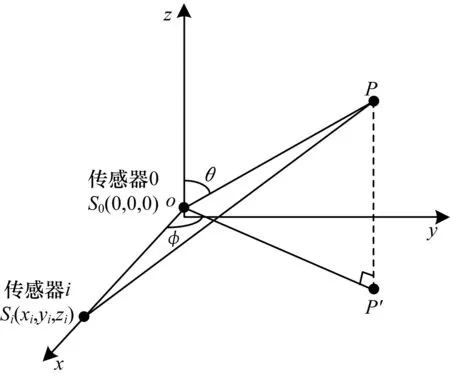
图1 三维空间辐射源测向示意图
(1)
其中,3个分量kx、ky、kz分别为辐射源DOA在3个坐标轴上的单位投影。在本文中,符号上方有“^”的值为估计值或测量值,否则为真实值。
通常假定第0个传感器为TDOA的测量基准,其位于坐标系原点,则存在如式(2)所示的TDOA测量方程。
(2)

则式(2)变为如下矩阵形式:
cτ=SK
(3)
由于真实TDOA值无法获得,实际测量结果均存在测量误差,用Δτ表示TDOA的测量误差矢量,则:

(4)
传统的LLS算法通过对式(3)进行求解,得到如下的估计结果[4]:
(5)


(6)
根据DOA在三维空间的三角函数关系,方位角和俯仰角的估计值可分别表示为:
(7)
2 LM测向算法
本文LM算法对初值的要求较低。将LLS算法的估计结果作为LM算法的初值,完全可以满足要求。在此基础上进行迭代运算,可以提高方位估计的精度。
将式(2)变换为:

(8)
则目标函数定义为:
(9)



(10)

将式(10)右边取最小化,则:

(11)
为避免计算海森函数的二阶信息,将式(11)化简,结果为:
(12)


(13)

λk=λk-1/1+α


阻尼因数更新后,根据式(12)更新增长矢量,然后根据式(13)更新方位估计,循环运行该过程,直至方位估计增加矢量足够小。
总结上述过程,可将LM算法的步骤表示为:
算法1LM测向算法
输入传感器数目及其坐标、TDOA测量值、迭代精度EPS


3 误差分析
3.1 克拉姆-拉奥下界
由式(8)可得测量方程为:
(14)


(15)
通过一些数学处理可以得出费歇尔信息矩阵:
(16)
其中:
则克拉姆-拉奥下界(Cramer-Rao Lower Bound,CRLB)为:
CRLB=FIM-1(γ)=((F)TW-1(F))-1
(17)
3.2 均方差估计
命题LM算法估计结果的均方差为:
MSE(Δγ)=((h(γ)))-1
(18)
(19)
由式(17)可得:


(20)

cov(Δγ)=(h(γ))-1
(21)
将式(21)与克拉姆-拉奥下界进行比对:
cov(Δγ)= (h(γ))-1=
(c(F)T(c2W)-1(c(F)))-1=
4 实验验证
4.1 累积分布函数
4.1.1 参数设置
本次实验的性能评估指标是测向误差的累积分布函数(Cumulative Distribution Function,CDF)。CDF描述实数随机变量的概率分布情况,其值越大,表示算法性能越好。辐射源测向误差为辐射源的估计方向与真实方向之间的差值。模拟实验以声源测向为背景,具体参数设置如下:
1)采用Matlab工具,每轮蒙特卡洛模拟均运行10 000次实验,LM算法和Taylor算法的迭代精度阈值为10-5。
2)传感器的位置随机部署,其x轴和y轴坐标在15 m半径的圆形内,z轴坐标在 [-5 m,5 m]的范围内。这与通常的声探测野外部署条件相似,且DOA估计结果位于合理范围内。
3)辐射源方位角与俯仰角的取值范围均为[30°,60°]。
4)考虑传感器数目变化,实验分2种情形:传感器数目较少,在[4,8]范围内随机选取;传感器数目较多,在[8,12]范围内随机选取。
5)TDOA测量误差服从高斯分布,不考虑测量的系统偏差问题。标准偏差在[0,20]范围内随机选取(单位为ms)。
6)由于LM算法和Taylor算法需要声音的速度参量,模拟现场测量的气象条件为:气温20 ℃,风速10 m/s,风向为π/3 。野外环境下气象参数通常会随着时间而改变,假定气温变化范围为±5°,风速变化范围为±6 m/s,风向变化范围为±π/8 。实验中根据文献[6]方法计算现场声速的估计值。
7)如果迭代后输出的结果中包含如下情况:方位角超出其周期2π的整数倍或俯仰角超出其周期π的整数倍,则相应加上或减去若干个各自的周期值,使得估计结果位于合理的角度范围内。否则,在统计测向误差和精度时会产生很大的不合理偏差。
4.1.2 实验结果
传感器数目在[4,8]范围内随机选取时实验结果如图2所示,传感器数目在[8,12]范围内随机选取时实验结果如图3所示。由图2、图3可以看出,LM算法具有最佳的性能,Taylor算法次之,LLS算法性能表现最差。另外,当传感器数目较多时,3种算法对方位角的估计性能几乎相同,原因是传感器的x轴和y轴坐标均在半径为15 m的圆内取值,较多的传感器数目使得各算法的方位角估计性能接近一致。
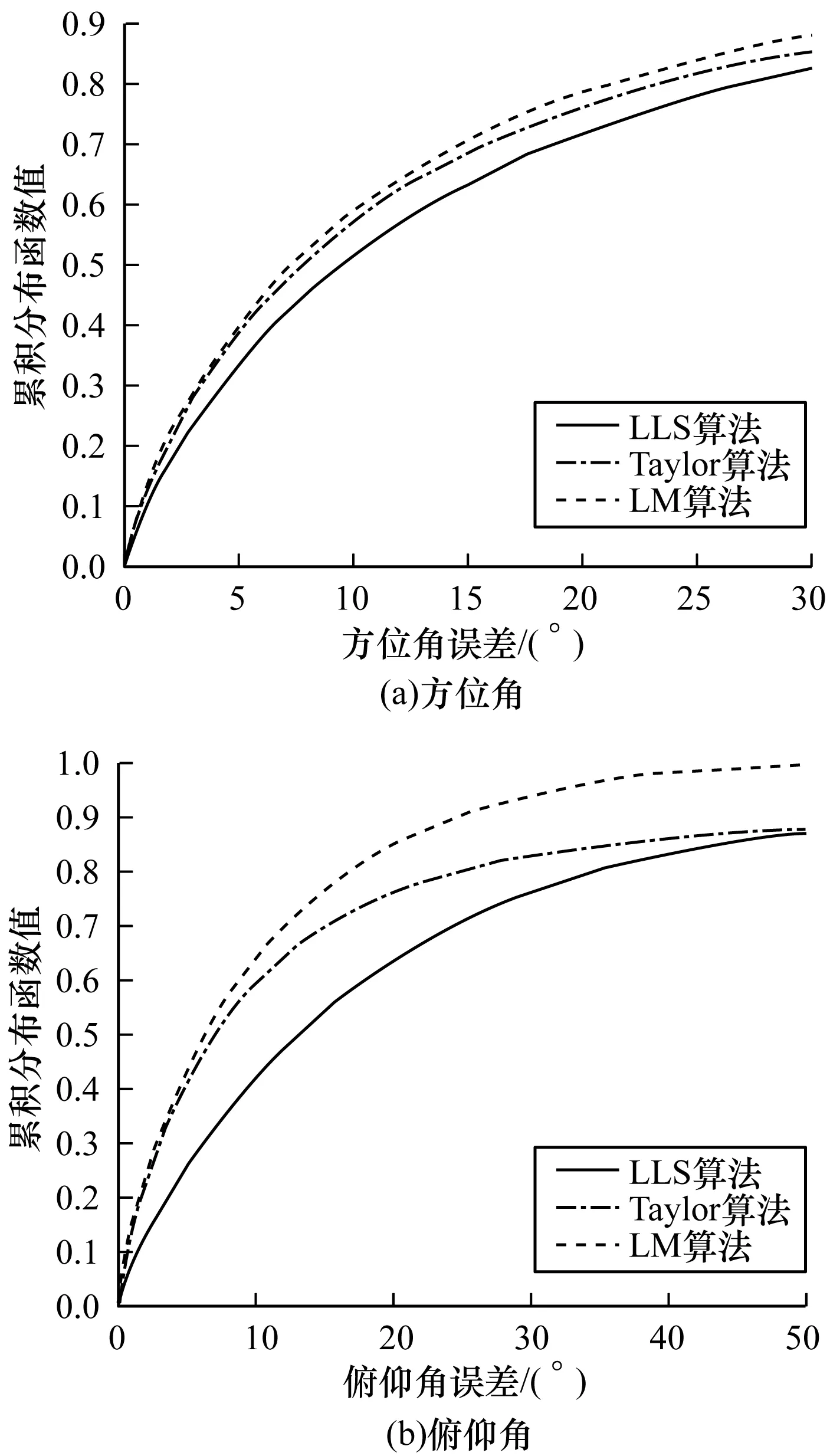
图2 传感器数目较少时算法DOA估计误差的CDF值
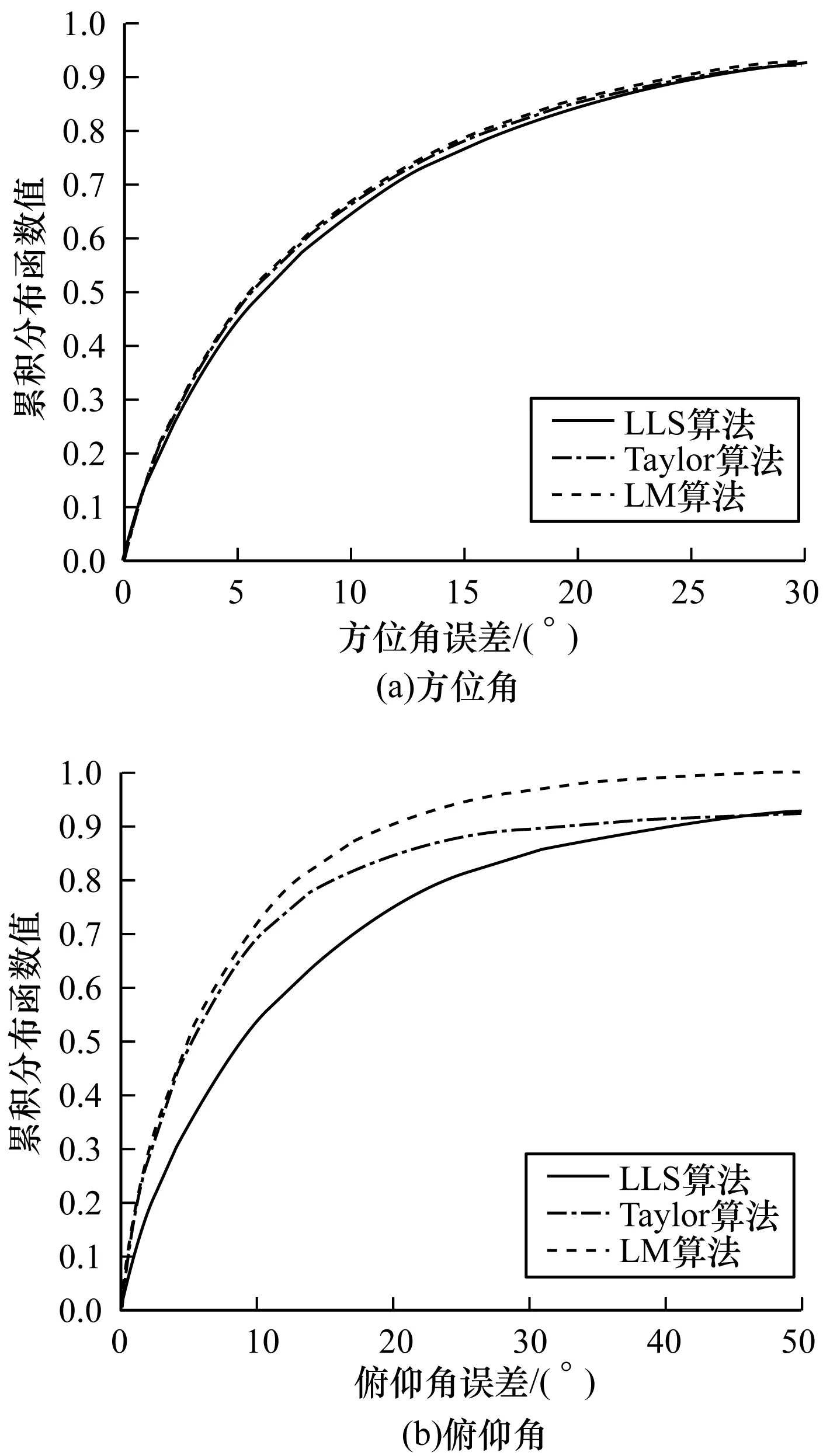
图3 传感器数目较多时算法DOA估计误差的CDF值
4.2 迭代算法性能分析
本次实验对Taylor算法和本文LM算法的不收敛率与平均迭代次数进行统计,以比较算法的性能。
传感器数目较少时的实验结果如表1所示,传感器数目较多时的实验结果如表2所示。由表1、表2可以看出,相对Taylor算法,LM算法在不收敛率及平均迭代次数上性能优越且稳定。另外,在实验中测得传感器数目为6时,Taylor算法不收敛率很高,主要原因是传感器数目少,LLS算法的DOA估计结果与真实值并不很接近,而Taylor算法对初值有很高的要求,当LLS算法的DOA估计结果作为Taylor算法迭代的初值时,必然会导致Taylor算法的不收敛率增高。

表1 传感器数目较少时算法性能比较

表2 传感器数目较多时算法性能比较
4.3 均方根误差
4.3.1 参数设置
本次实验以测向的均方根误差(Root Mean Square Error,RMSE)作为性能评估指标。RMSE描述方位估计偏差[16],能够反映测向的精度。实验主要参数设置如下:
1)TDOA测量误差服从高斯分布,不考虑测量的系统偏差问题。标准偏差取值范围为[10,20](单位为ms)。
2)传感器数目固定为8个,当第一个传感器坐标平移后设置为坐标原点时,一组随机生成的阵列坐标如下:(0,0,0),(0.63,1.70,-3.45),(6.56,9.85,-6.38),(1.60,15.33,0.45),(7.66,5.28,1.55),(18.22,8.28,-5.55),(-1.96,24.40,-3.21),(14.37,11.49,1.54) (单位为m)。
3)辐射源方位角与俯仰角取值均为45°。
4.3.2 实验结果
各算法RMSE实验结果如图4所示,其中,CRLB线为克拉姆-拉奥下界曲线。由图4可以看出,在测量噪声较高时,LM算法的性能能够达到测向误差的CRLB,表明其具有较高的有效性和鲁棒性。
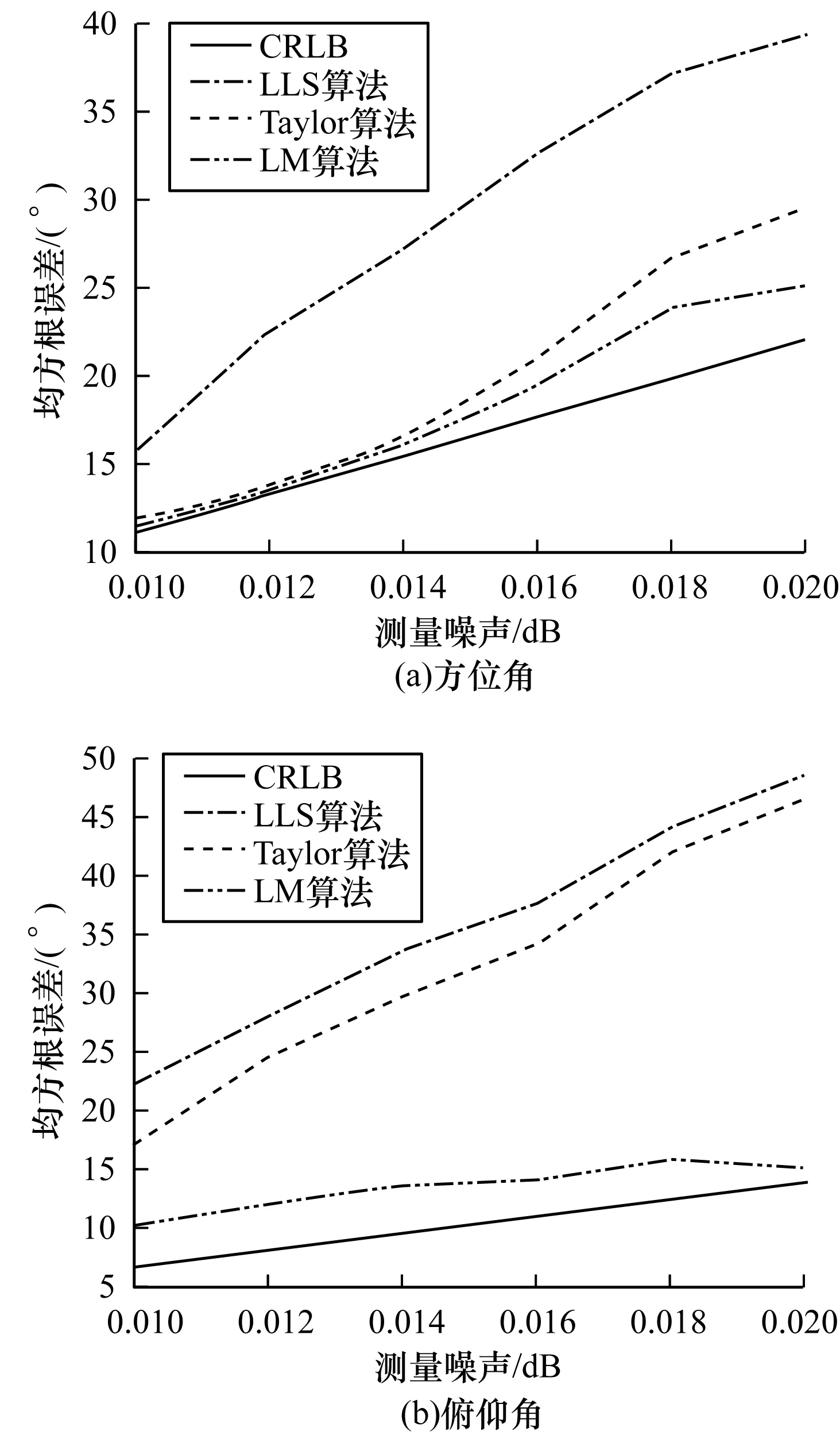
图4 不同算法DOA估计的RMSE值
5 结束语
本文研究声源测向问题,提出一种基于莱温伯格-马夸特的测向算法LM。该算法能够较好地解决TDOA测量噪声干扰测向精度的问题,并且避免Taylor算法对初值要求较高及结果不收敛的现象。实验结果表明,相对LLS算法、Taylor算法,该算法性能优越,能够达到克拉姆-拉奥下界。但在某些环境下,若声速偏差较大会严重干扰本文算法的测向精度,解决该问题将是今后的研究重点。
猜你喜欢
中学化学(2024年4期)2024-04-29 22:54:35
卷宗(2021年2期)2021-03-09 07:57:24
北京航空航天大学学报(2020年10期)2020-11-14 09:26:16
空间科学学报(2020年4期)2020-04-22 01:17:04
雷达学报(2018年5期)2018-12-05 03:13:16
雷达学报(2018年3期)2018-07-18 02:41:20
电子设计工程(2017年20期)2017-02-10 03:39:23
中国民族医药杂志(2016年5期)2016-05-09 07:43:50
作文大王·低年级(2016年3期)2016-03-11 00:48:53
河南科技(2015年18期)2015-11-25 08:50:14