
基于双目立体视觉的三维测振技术
2018-11-20 09:28解树平万新军黄鹏程江剑宇
光学仪器 2018年5期
解树平, 杨 波, 万新军, 黄鹏程, 江剑宇
(1.上海理工大学 光电信息与计算机工程学院, 上海 200093;2.上海理工大学 上海市现代光学系统重点实验室, 上海 200093;3.上海理工大学 教育部光学仪器与系统工程研究中心, 上海 200093)
引 言
随着科学技术的发展,振动位移、频率等振动特性引起的问题受到了各行各业的高度关注。例如:超精密加工设备的振动会直接影响加工的精度和有效性;车辆自振动及在路面上行驶时的振动直接关系到驾驶性能和乘坐的舒适性;高层建筑、桥梁等由于风载和地震所带来的振动会直接关系到这些结构的安全[1]。研究系统的振动特性,分析产生振动的原因,进行设备故障诊断及状态监测,在科学研究领域和工程领域都是非常重要的,对军事、工业、农业等方面有着重要的实际意义。随着工艺技术和集成电路的发展,传统的接触式传感器在测振过程中需要将传感器固定在待测物上,但是传感器的附加质量会改变整个动态系统的特性,导致测量结构的不准确。在某些特殊的场合下,振动检测需要在高温高压、放射或者腐蚀状态下进行,限制了接触式测量的使用范围。非接触测量方法具有抗干扰性、高分辨率、高精度和非接触的特性,得到了广泛的应用,有电子散斑法、激光全息法、激光三角法和激光多普勒法等。国内外应用较多的是激光多普勒测振技术[2],但每次的测量范围局限于其照射的范围,仅适用于测量视场较小的情况,无法满足大面积的多点同步全场测量的要求。
近年来,高速工业相机和数字图像处理技术快速发展,基于计算机视觉的双目测振技术开始逐渐兴起。双目视觉测量原理是通过模拟人类视觉的成像方式从两个不同的观察角度获取同一物,获取在不同视角下的感知图像,通过三角几何光学原理计算图像像素间的位置偏差(即视差),重建目标物体的深度信息获取景物的三维信息。国内外学者围绕双目立体视觉的不同步骤做了非常多的研究,英国利物浦大学的Wang等利用DIC机器视觉测试系统对骑车引擎盖进行了测量,获得了相应的振动模态[3-4];美国的Helfrick等详细分析了振动测试的重要性,并对风扇叶进行了相关的测试研究等[5];全燕鸣等基于双目视觉对工件三维尺寸进行在机三维测振[6]。郭俊锋等通过内窥镜设计的双目测量系统[7],系统测量误差在±0.2 mm。

图1 双目测振系统结构Fig.1 Binocular vibration system structure
本文采用基于计算机双目视觉原理设计制作了一种大尺寸多点同步三维振动测量系统,人工粘贴一定密度的超轻质量测量标识点到待测结构件上,在振动测试中,利用两台高速相机模块同步高速拍摄包含测量标识点的待测结构件,通过图像处理算法、立体视觉定位算法快速计算出各个标识点的空间三维坐标,根据坐标随时间的变化得到待测物体上各点三维振动信息,是一种高效率的面阵振动同步测量手段。它能够同步测量大型构件面上众多点的三维振动数据,反映出整体结构的振动信息和关键测量点位置,为最终的高精度宽频带测量提供支撑信息具有重要的实用意义。它具有测量效率高、精度高、视场大等显著优点,而且系统结构简单,操作便利,可靠性高,在测振中具有广泛的应用前景。
1 测量原理
图1为实验中所使用的双目立体视觉理论系统,主要包括4个模块:高速成像相机模块、高速图像采集存储模块、高精度成像镜头、反射标志点等。系统中采用平行放置的高速相机来获取目标点的信息,相机采用理想的小孔成像模型,认为所有光线都沿直线传播,并在此基础上认为物体表面的所有反射光都通过一个小孔投影到相平面。为了更直接、更形象地描述相机成像的全过程,利用数学理论,定义了4个坐标系,它们分别为:世界坐标系(Ow-XwYwZw),相机坐标系(Oc-XcYcZc),图像坐标系(o-xy),像素坐标系(o-uv)。上述4个坐标系之间的关系如图2所示。
图2描述的是双目立体视觉原理[8],由图2可知,像素坐标系和图像坐标系之间的数学关系可以表示为
(1)
式中:dx和dy表示为像平面x轴和y轴上的每个像素代表的物理尺寸;(u,v)为某一像素点的坐标;定义(u0,v0)为图像坐标系的原点在像素坐标系下的坐标,通常为像素坐标系的中心。

图2 双目立体视觉原理及各坐标系关系图Fig.2 Principle of binocular stereo vision and coordinate system
设相机的焦距为f,则图像坐标系和相机坐标系的关系为
式中:(Xe,Ye,Ze)为地球坐标系中一点的坐标;R和t分别表示旋转矩阵和平移矩阵。
相机坐标系与世界坐标系之间的关系可表示为
(4)
其中
式中:H矩阵被称为相机内部参数矩阵;M被称为相机外部参数矩阵。
假设左相机的像素坐标系ol-ulvl与世界坐标系Ow-XwYwZw完全重合,左相机有效焦距为fl,右相机坐标系or-urvr,有效焦距为fr。如果空间标识点P(Xw,Yw,Zw)在两个摄像机像面的像点分别为Pl(ul,vl)、Pr(ur,vr),那么它们之间满足的关系如下:
(5)
式中:Rlr和tlr为右相机坐标系相对于左相机坐标系的旋转矩阵和平移矩阵。当Rlr,tlr以及P点在左右图像上位置Pl(ul,vl)、Pr(ur,vr)都已知的条件下,根据式(5)中的几何关系可以确定空间点P的三维坐标,通过对比相应点的三维坐标变化,得到待测物的振动信息,实现实时三维测量[9-12]。
2 图像标志点处理关键技术
本文实验中所设计的三维振动测量系统如图3所示,主要工作流程为:
1) 根据实际动态测试需求,在待测结构件上可能需要进行振动测试的位置粘贴圆形反射标识点[13];
2) 照明驱动模块产生适当照度照明,同步触发两个高速相机对待测结构件进行高速拍摄,采集500帧图片进行下一步处理;
3) 图像采集模块获取图像信号并送入计算机处理;
4) 计算机软件快速提取反射标识点信息、完成匹配并计算出三维位置信息;
5) 振动分析软件快速计算各个测量位置点的空间三维位移轨迹、速度以及加速度数据,完成结构件振动模态分析以及计算关键测量点位置,图形输出待测点的振动特性。
该视觉多点三维振动测量部件的技术路线是在待测大型结构件上布置任意数量的超轻质量反射标识点(不会对待测结构件动态特性产生影响),在振动测试过程中,采用TTL信号同步触发两高速相机模块对这些反射标识点进行高速拍摄记录,并通过高速采集和通讯接口输入存储和处理单元。通过开发高精度高效率标识点坐标提取算法计算各个反射标识点的图像坐标,根据现场快速标定的摄像机组结构参数,并通过高速高精度立体视觉匹配算法计算出各个反射标识点的空间三维坐标。根据每一次触发拍摄的图像即可测量这一时刻的反射标识点三维坐标,将三维坐标按照时间和三维空间维度通过算法进行分析,从而获得待测结构件面上各点的三维运动轨迹线、位移、速度和加速度分布,进而可以开展整体振动分析。

图3 三维振动测量系统实物图Fig.3 The prototype of binocular vibration system
3 振动测量验证实验
为了验证振动测量的准确性,本文使用标准振动台作为振动源,首先对所用相机采用张正友平面模板法标定,如图4所示,通过左右相机同步拍摄N幅标定板的不同角度和位置的图像,提取各角点的像素坐标,求取左右相机的参数,从而完成标定过程。图4(c)为标定误差,标定误差为0.088 64像素,此误差完全满足测量需求。

图4 相机标定Fig.4 The calibration of camera
实验中,在待测件上随机贴上100个圆形反射标识点(如图5),该标识点的反光特性为按照入射光的方向反射光线,相机采集到的图像中标识点具有较高的对比度,将待测件刚性固定在标准振动台上;同时,在算法上优化反射标识点识别、中心坐标提取算法以及左右图像标识点匹配算法,可以达到足够高的处理速度,在得到各标识点的三维坐标后,通过计算得出各标识点的振动频率和幅值。
为了验证本系统的稳定性,在其他条件一致的情况下,将标准振动台设置为不同频率、幅值进行测试,将测量得到的频率及振幅与标准振动台进行比较分析。标准振动台测试频率10 Hz,振幅0.5 mm,其中一点的测试数据如图6所示。
不同测振频率、振幅的测量数据如表1所示,实际测量结果与理想结果基本一致,实测频率误差为0 Hz,振幅误差小于0.168 mm,系统测量精度为54 μm/m,测量误差较小,可以满足大型结构件和复杂设备等大面积振动测量的需求。
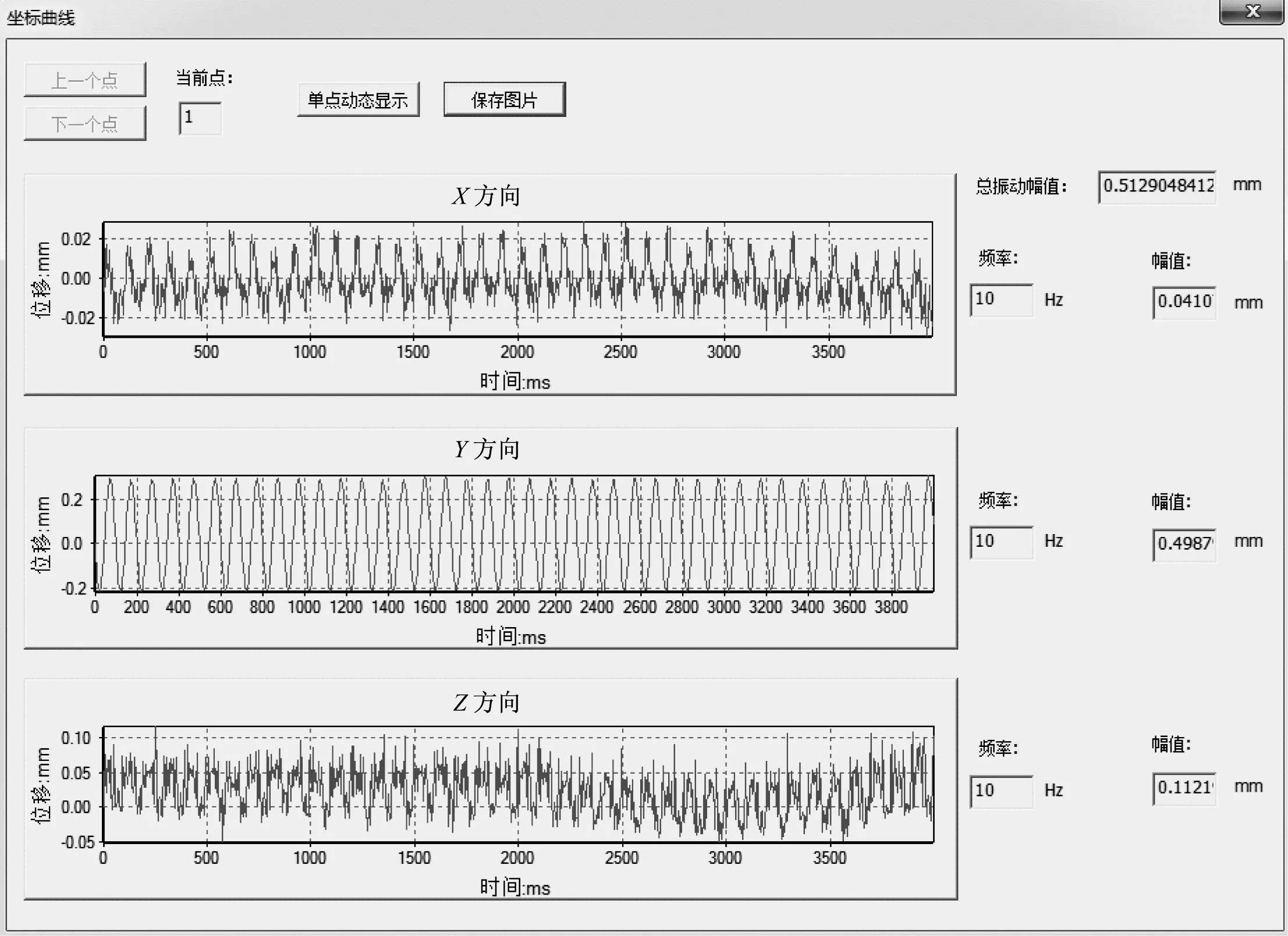
图6 频率10 Hz,振幅0.5 mm曲线Fig.6 Vibration curve of 10 Hz,0.5 mm
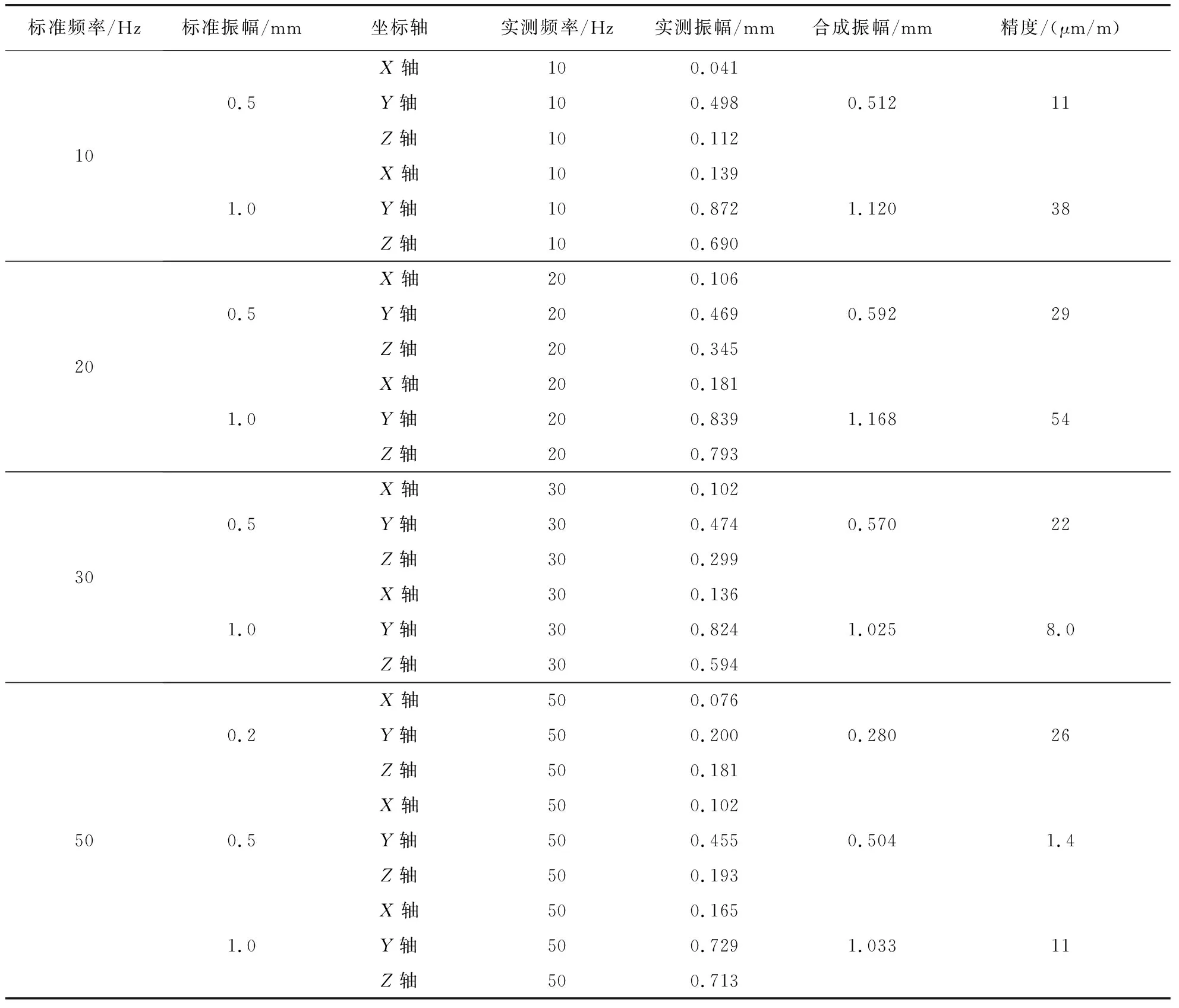
标准频率/Hz标准振幅/mm坐标轴实测频率/Hz实测振幅/mm合成振幅/mm精度/(μm/m)100.51.0X轴100.041Y轴100.498Z轴100.112X轴100.139Y轴100.872Z轴100.6900.512111.12038200.51.0X轴200.106Y轴200.469Z轴200.345X轴200.181Y轴200.839Z轴200.7930.592291.16854300.51.0X轴300.102Y轴300.474Z轴300.299X轴300.136Y轴300.824Z轴300.5940.570221.0258.0500.20.51.0X轴500.076Y轴500.200Z轴500.181X轴500.102Y轴500.455Z轴500.193X轴500.165Y轴500.729Z轴500.7130.280260.5041.41.03311
4 结 论
本文提出了一种基于双目立体视觉三维测振技术,并针对系统特性设计了一种新颖的立体匹配算法,实现了多点同步实时测量,通过实验验证了该方法可以满足大面积测量的需求。由于其非侵入性、空间分辨力高、测量时间短等优点,双目视觉测振是设备工作时的在线监控以及生产过程中工件在线高精度检测的理想测试方法,应用前景十分广阔。
猜你喜欢
电子制作(2019年20期)2019-12-04
经济技术协作信息(2018年8期)2019-01-14
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
纤维复合材料(2018年4期)2018-04-28
数学大世界(2018年1期)2018-04-12
制造技术与机床(2017年6期)2018-01-19
制造技术与机床(2017年3期)2017-06-23
中等数学(2017年2期)2017-06-01
现代计算机(2016年11期)2016-02-28
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
