
双定子行波型旋转超声电机驱动器设计
2018-11-15 03:18马晨晨纪跃波
重庆科技学院学报(自然科学版) 2018年5期
马晨晨 纪跃波
(集美大学机械与能源工程学院, 福建 厦门 361021)
超声电机作为一种电驱动力装置,利用的是压电材料的逆压电效应,使定子在超声频段内(20 kHz以上)产生微幅振动,通过预紧力使定转子彼此摩擦耦合,获得直线或旋转运动,实现驱动负载工作。超声电机具有低速大转矩、惯性小、响应速度快、不受电磁影响、不产生强磁场、控制性能好、结构简单、噪音低等优良特性,可以应用于航空航天、机器人、医疗设备、军事装备等领域。行波型旋转超声电机是目前国内外最具代表性的一类超声电机,其中的双定子行波型旋转超声电机是采用双定子联合驱动转子,可以保证两个定子工作面与转子表面平行接触,受力均匀,克服了单定子行波型旋转超声电机定转子间存在的径向接触不均匀、径向滑移摩擦损耗大等问题[1-2],能有效提高输出转矩和效率。因此,针对双定子行波型旋转超声电机的驱动技术研究更具实际意义。为此,选择以双定子行波型旋转超声电机为研究对象,设计开发针对这种超声电机的配套驱动器。
1 总体设计方案
双定子行波型旋转超声电机的驱动技术要求:(1)提供2组4路且存在相位差的同频等幅正弦交流电压的驱动信号,每2路信号驱动一个定子,相位差为90°,信号频率在超声频段范围内即(20~60)kHz,电压峰值可达300 V;(2)双定子行波型旋转超声电机属于容性负载,具有强烈的时变和非线性特点[1-2],须采用闭环驱动控制。
基于双定子行波型旋转超声电机的驱动技术要求,设计的驱动器总体结构如图1所示,主要包括驱动电路与控制电路两部分。其中,驱动电路由C8051F120型单片机模块、低通滤波模块、相移模块、前置电压放大及功率放大电路构成;控制电路由C8051F120单片机与孤极电压反馈电路组成。首先,单片机输出4路可调频率的同频等幅方波电压信号;然后,经过低通滤波电路转换成4路光滑的正弦电压信号,并连接有源移相电路用于调整其中2路信号相位至90°;最后,通过利用前置电压放大电路、功率放大电路及变压器对4路输入信号进行一定的功率放大,使得到的高频高压正弦信号可以驱动超声电机正常运行。鉴于双定子行波型旋转超声电机在运行过程中受温升影响[3]而导致转速下降,通过利用附着在定子表面的压电陶瓷元件(孤极)检测其信号电压并反馈,实现驱动信号频率的自动调整,进一步保证超声电机的平稳运行。
2 驱动及控制电路
2.1 驱动电路
驱动电路主要包括信号发生模块、低通滤波模块、相移模块、前置电压放大及功率放大电路。
(1) 信号发生模块。双定子行波型旋转超声电机驱动控制器中原始信号的输出,是利用C8051F120型单片机[4]对其内部所拥有的可编程计数器阵列模块(PCA0)资源进行配置,从而产生相同的4路频率可调的方波信号,其电压幅值±1.65 V。其中,将PCA0模块通过软件编程设置为频率输出工作方式。
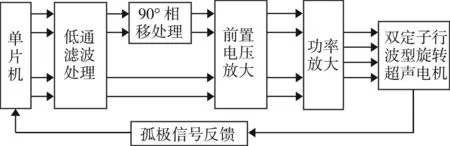
图1 驱动器总体结构
(2) 低通滤波模块。针对双定子行波型旋转超声电机驱动器的技术要求,须设计由2个二阶巴特沃斯低通滤波电路组成的四阶滤波器[5],输入信号截止频率设定为60 kHz,主要采用集成运放TL072CP与电阻(R)、电容(C)构成有源低通滤波电路。由于该有源低通滤波电路具有电压放大作用,因此增加电压衰减电路,以使输出信号电压幅值无增减。
(3) 相移模块。由于无源RC移相电路输出信号相移角度有限,因此通过加入TL072CP与R、C组成有源移相电路,以增加相位角可调范围。该相移模块由两级RC滞后型电路组成,实现输出信号在 0°~180°范围内的精确相移。
(4) 前置电压放大模块。采用同相放大电路连接方式,选用AD811AN芯片,其供电电源电压为±15 V;并接电容0.1 μF和10 μF,用于稳定电压。该模块通过可调电阻控制信号电压放大倍数,输出信号可以获得最高的电压峰峰值为20 V。
(5) 功放模块。包括功率放大级电路与升压变压器。功率放大级电路依旧采用同相放大接法,并使用2片OPA541AM芯片并联工作,其电源电压设置在±30 V,从而获得更大的输出功率。其中,2片OPA541AM需分别输出5 A电流,则输出端限流电阻为0.1 Ω。升压变压器的相关参数:变压器型号为EC-35型;原边与副边参数:6匝、1.8 mm和90匝、0.44 mm;可使输出信号电压的峰值达到300 V。
利用Multisim软件进行仿真分析,结果表明,上述各电路模块能够满足双定子行波型旋转超声电机驱动技术要求。其中一路的驱动电路原理如图2所示。
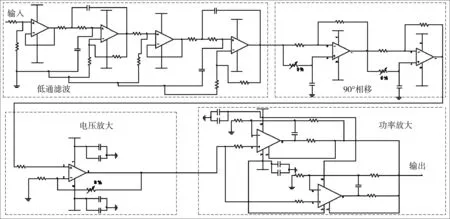
图2 驱动电路原理图
2.2 控制电路
控制电路采取孤极反馈信号电压控制法,实现信号频率自动调节,主要通过孤极电压反馈电路和C8051F120单片机模数转换器(ADC0)子系统实现电机控制。由于孤极采集信号为交流电压,因此须对其进行整流滤波,转换成直流低压信号,传递至C8051F120单片机的ADC中,并对反馈信号的测量电压值与设定电压标准值进行比较,实现对单片机输出信号频率值的自动调节。其中,选用整流桥KBP206作为整流部件。由于孤极反馈信号电压值较高,选用可控精密稳压源TL431ACD、光电耦合器4N35,匹配适当电阻、电容,隔离采集其数值,从而保护驱动器电路。孤极电压反馈电路原理见图3。
3 软件开发
双定子行波型旋转超声电机的驱动器程序是在Keil μVision 5集成环境下,利用C语言进行编程开发的。该驱动器软件主要由系统初始化模块、时钟模块、信号发生模块、按键扫描与处理模块、液晶显示模块以及A/D采集转换模块组成。各模块程序是根据超声电机驱动器的功能要求而进行开发的,能够实现信号启动、信号停止、信号频率加减、孤极反馈信号电压采集、信号频率自动调整、信号频率和反馈信号电压显示等功能。驱动器软件的总体流程见图4。
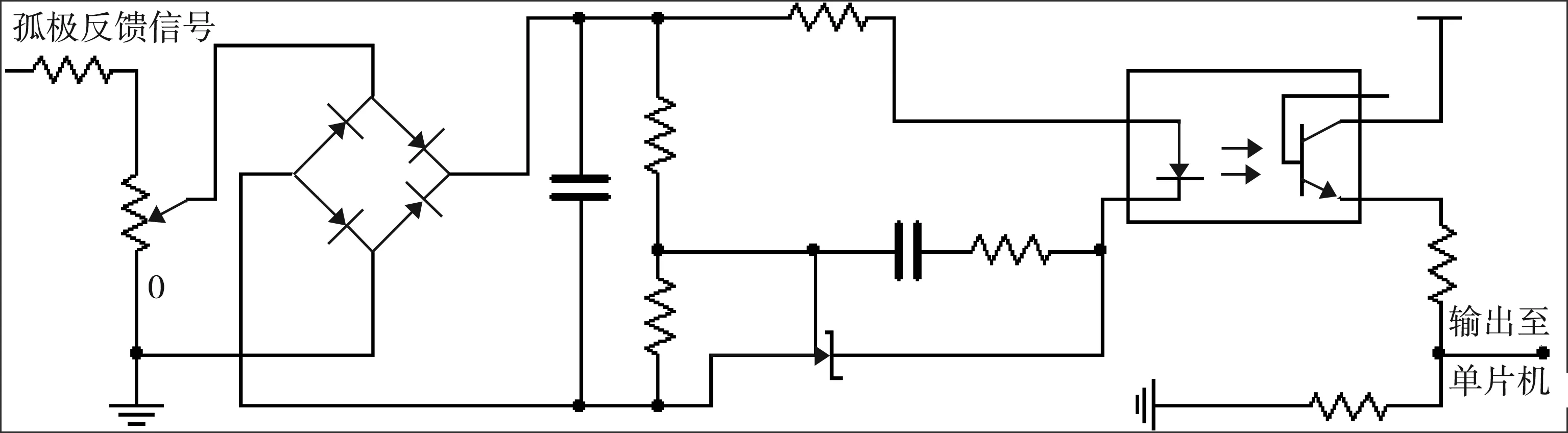
图3 孤极电压反馈电路原理图

图4 驱动器软件的总体流程
4 测试情况
4.1 输出信号测试
依据上述有关电路模块设计及参数,搭建驱动器电路板,结合软件程序,进行实际测试分析。由信号发生模块产生的原始信号,经过一系列电路模块处理,最终可获得最大电压峰值为300 V的正弦高频信号,且其频率、幅值及相位均符合技术要求。其中一路输出信号波形效果如图5a所示。由图可知,该驱动器输出的信号能够驱动双定子行波型旋转超声电机正常工作,但存在一定的高频信号干扰。在驱动信号输出端并联一个4.7 kΩ电阻,串联一个1.65 mH电感,其信号输出波形效果如图5b所示。最终输出的为比较纯净的高频正弦电压信号,提高了超声电机运行的稳定性。
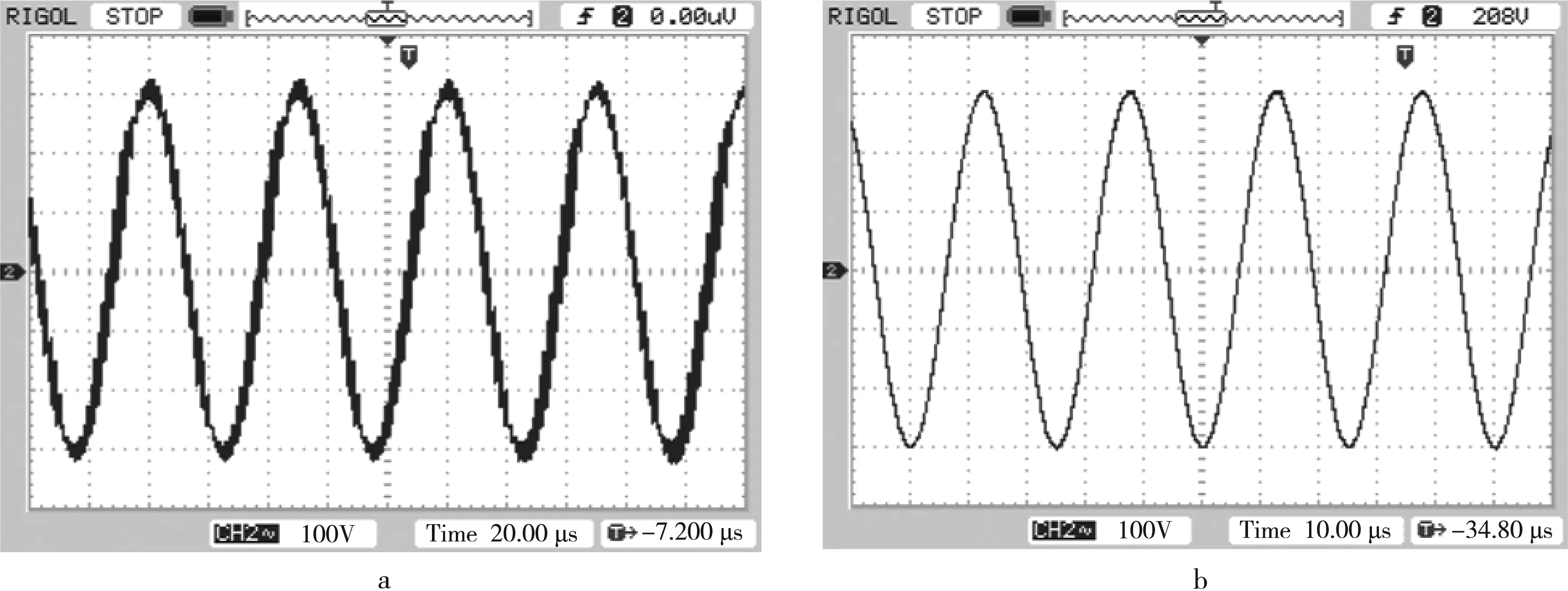
图5 驱动器输出信号实际效果图
通过搭建孤极电压反馈电路板,结合软件,进行测试分析。图6中a和b所示,分别为双定子行波型旋转超声电机处于正常与异常运行状态时,LCD1602液晶显示的输出信号频率和孤极反馈电压测量值。为使超声电机正常运行,此时驱动器控制电路发生作用,自动调整输出信号频率值,且反复检测孤极反馈信号电压值,直到电机转速恢复正常(见图7)。测试结果表明,该驱动器控制电路能够有效采集并反馈孤极信号电压值,能够实现输出信号频率自动调节,符合双定子行波型旋转超声电机工作要求。

图6 调整前LCD1602显示的输出信号频率及反馈电压测量值

图7 调整后LCD1602显示的输出信号频率及反馈电压测量值
5 结 语
针对双定子行波型旋转超声电机,研究设计基于C8051F120单片机的驱动器。完成对驱动器各模块的软硬件研究与仿真分析,并通过制作实际电路,测试了该驱动器的主要功能。这种驱动器,能够稳定输出4路频率为(20~60)kHz且幅值与相位可调的正弦电压信号;在双定子行波型旋转超声电机工作异常时,它可以自动调整输出信号频率,从而保证电机稳定运行。测试结果表明,这种驱动器能够有效满足双定子行波型旋转超声电机工作技术要求,并具有良好的通用性与经济性。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
数学杂志(2022年2期)2022-09-27
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
电脑爱好者(2020年6期)2020-05-26
数学物理学报(2020年1期)2020-04-21
北京航空航天大学学报(2017年5期)2017-11-23
光学精密工程(2016年5期)2016-11-07
