链斗式提升机关键技术研究与改进
2018-11-15 05:28:02陈金球汤同欢程文炳
中国资源综合利用 2018年10期
陈金球,汤同欢,程文炳
(铜陵有色金冠铜业分公司,安徽 铜陵 244021)
金冠铜业分公司冰铜水淬和渣水淬是闪速炉铜冶炼工艺流程中的关键工序,其工作原理是采用高压水流对熔融状态下的冰铜(渣)液进行冷击,被冷击的高温熔体爆裂成细小的水淬冰铜和水淬渣沉积在水淬池中。链斗式提升机将水淬冰铜和水淬渣即时打捞沥水,然后进入下一道工序。放铜、放渣的不均匀性,酸性水淬环境等要求链斗式提升机适应生产工况,既要防止量大导致设备故障,又要保证铜渣的沥水效果。由于链斗式提升机是闪速铜冶炼水淬系统的关键设备,其使用效果直接影响闪速炉作业率,老式链斗式提升机不能满足生产要求,因此开发新型链斗捞渣机势在必行。
1 链斗捞渣机概述
链斗捞渣机主要由驱动系统、捞渣系统、卷扬提升系统、机架滑轨系统及控制系统组成,其结构如图1所示。
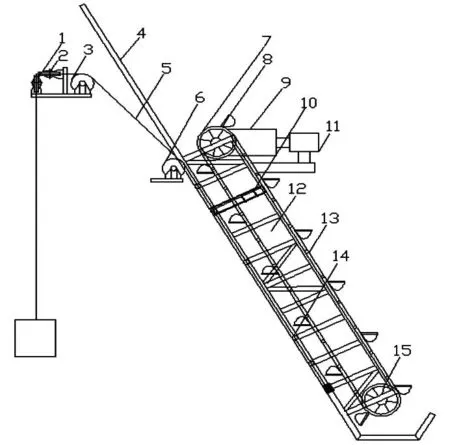
图1 链斗捞渣机结构
驱动系统通过头轮轴带动捞渣系统运转;捞渣系统通过渣斗捞起水淬池内的冰铜(渣);控制系统根据驱动系统驱动电机负荷反馈到提升系统,提升系统根据反馈的负荷调整捞渣系统的高度以达到均匀生产的目的,防止捞渣量过大导致捞渣机出现故障,同时提升系统在捞渣机需要检修时将捞渣机提升到检修平台以便检修作业。其特点有:可移动式机体为捞渣量的自动控制提供条件,同时方便检修作业;捞渣量的自动控制系统使捞渣机运行负荷均匀;输送链采用轴销链更加适应物料工况。
2 链斗捞渣机关键技术
2.1 可移动式机体
可移动式链斗捞渣机增加了一套卷扬提升系统,卷扬提升系统包括电机、减速机、卷扬装置、定滑轮、钢丝绳和配重等[1]。卷扬机绳索一端与斗提机捞渣系统机体相连,另一端与设定的配重相连。根据设计额定捞渣量,粗略计算卷扬提升系统静态平衡状态下的配重设置质量。在忽略次要因素的情况下,捞渣机受力分析如图2所示。
根据受力分析可得:
式中,mg为平均捞取物料质量(料斗容积为0.144 m3;有效料斗数量为15个;冰铜密度为4.0 t/m3;机架1质量为6.38 t;机架2质量为5.3 t;链条质量为1.77 t;料斗总质量为0.115×30=3.45 t;驱动为6.976 t;尾轮为1.29 t;机架为3 t;机架残余物料质量估计为3 t。总质量mg为41.5 t)。
提升机静止时,机架滚轮与轨道之间静摩擦力:

式中,μ为不锈钢与不锈钢无润滑状况下的滑动摩擦系数,取值为0.35(0.3~0.4)。
机架向下运动时配重力的选择为:

机架向上运行时配重力的选择为:

链斗捞渣机配重总量的选择为:

因此,链斗捞渣机总配重取36 t,东侧西侧配重各18 t。
另外,链斗捞渣机有带轨道的固定机架,捞渣系统通过四组滚轮在固定机架的槽导轨上上下滚动移动。滚轮沿着链斗捞渣机捞渣系统框架两侧对称布置,同时动支架两侧设有防倾翻装置,结构如图3所示。捞渣系统在导轨上移动改变捞料深度,为自动控制捞渣量的大小提供可能。
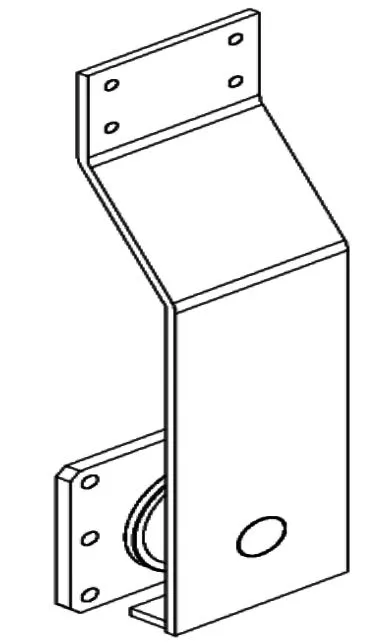
图3 防倾翻装置
2.2 捞渣量的自动控制
可移动式机体是捞渣量自动控制设计的基础,链斗捞渣机通过链斗驱动电机的电流来决定捞渣系统本体的升降,捞渣系统本体利用升降控制捞渣深度来调节捞渣量。链斗捞渣机设有工作、检修和非工作三种状态。
工作状态:链斗驱动电机有4个电流值的设定,即最大电流、最小电流、最大工作电流和最小工作电流。4个电流的关系如表1所示。

表1 电流设定关系
最大电流45 A和最小电流30 A是系统动作的触发电流值,即链斗驱动电机电流大于45 A或者小于30 A时都会导致提升系统动作。链斗驱动电机电流大于45 A时,控制系统会自动启动卷扬电机将捞渣系统上提,链斗驱动电机电流就会减小,当电流减小于最大工作电流,卷扬电机就会停止工作。同理,链斗驱动电机电流小于30 A时,控制系统会自动启动卷扬电机将捞渣系统下放,链斗驱动电机电流就会增加,电流大于最小工作电流时,卷扬电机就会停止工作。系统动作都有延时设定,设置成3 s,当链斗驱动电机电流连续3 s大于45 A或者小于30 A时,提升系统才会动作。
检修状态:提升装置先将捞渣系统慢速提至水面位置,再快速提至提升调速位开关位置,最后再慢速提升至上限位开关位置处停止。在系统不停车情况下对链斗捞渣机进行检修。检修结束,提升装置先将捞渣系统慢速下放至调速位开关位置处,再快速下放至水面位置,最后慢速下放至下限位开关位置处停止。
非工作状态:斗式提升机驱动装置电机以低速运行。
2.3 适应工况的轴销输送链
链斗捞渣机输送链条是捞渣机的关键部件,经过研究分析,如果采用滚子链,捞渣系统滚子链滚子与轨道间为滚动摩擦,驱动力减少量为滑动摩擦力与滚动摩擦力差值:

式中,μk为不锈钢间无润滑状态下滚动摩擦系数,取值为0.11(0.10~0.12)。
采用滚子链有链斗驱动力小、所需电机功率小、轨道与链条件磨损较小的优点。但是,铜冶炼捞冰铜(渣)作业含沙量大且渣硬度较高,在酸性环境运行,滚子链存在诸多劣势:链条材质既要考虑耐磨性,又要考虑耐腐蚀性,选用3Cr13比较合适,马氏体不锈钢具有良好的淬火硬度,但淬火工艺要求非常高;链条因腐蚀磨损导致销轴与链板接触处间隙过大,内链板易从销套上脱离,链条易被拉坏;随着套与销磨损间隙变大,渣会进入套内,滚子套不能转动或被卡碎,产生断链等缺点[2]。
综合各种因素考虑使用轴销链,根据计算链条选型。链条材质:ZG35CrMo,套筒;销轴的材质:1Cr13;链条运行速度:11 m/min;链条张力:82.5kN;破断载荷≥825 kN。链条节距P=304.8 mm,每四节为一个单元,其中一节带安装座。输送链结构如图4所示。
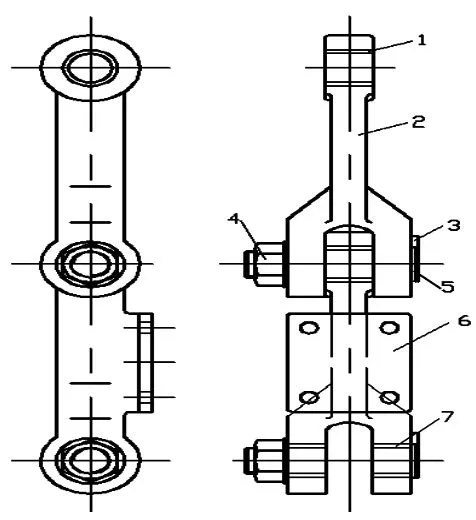
图4 捞冰渣机输送链结构
3 生产实践中持续改进
链斗式捞渣机在生产实践过程中,存在着设计不合理、选型不恰当等情况。通过分析生产实践中出现的问题,笔者对链斗进行了优化,并对张紧装置、尾轮组进行了改造。
3.1 链斗的优化
在链斗捞渣机运行过程中,链斗会出现变形,在铲起物料时,链斗的外框会受到物料的反作用力。该反作用力的分力在垂直于链斗运动方向上对链斗产生压力,使之发生变形;在平行于链斗运动方向上的分力作用在链斗以及链斗与链条的连接处,产生倾翻力矩和弯矩,造成链斗变形、连接板处螺栓断裂等故障。
通过总结分析链斗运行过程中的受力状态,经过三维建模和有限元分析,笔者发现:物料对链斗反作用力的力臂长度过长;链斗固定板的连接处刚度较弱;物料作用力与链斗沿口成63°角[3]。针对分析结果,可以将链斗固定螺栓孔的位置整体下移80 mm,缩短反作用力的力臂长度,减小倾翻力矩和弯矩;在链斗的背部,增加三个均匀分布的加强筋板,增加链斗背部的抗变形能力;将中间沿口支撑改到斜下方,并与沿口成63°角,减小了中间支撑受到的扭力,也保护了支撑焊缝。改进前后链斗结构如图5所示。
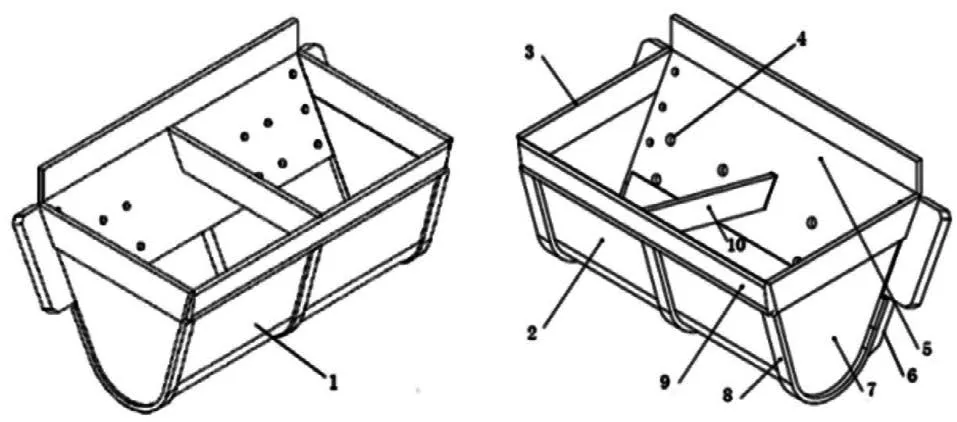
图5 改进前后链斗结构
改进后的链斗受力状况大大改善,承载能力大幅度提高。在相同的负载下,改进前单位负载下最大应力为224 MPa,改进后单位负载下最大应力为127.74 MPa。改进后的链斗没有出现变形、连接板处螺栓断裂等故障,实践证明受力分析与建模的正确性。
3.2 张紧装置的改造
在输送链运行过程中,轴销与链孔磨损会导致链条节距变大,累计达到一定的程度,会造成尾轮齿挤压链条,致使链条受损断裂。而链斗捞渣机尾轮张紧装置主要作用则是调整因不均匀磨损导致两条链条长短误差而带来的跑偏情况。改进前,张紧装置采用两根张紧丝杆调节尾轮的方式,其结构如图6所示。

图6 改进前的尾轮张紧装置
张紧装置的设计无法实现其功能。首先对链条的张紧必须将捞渣系统提升到检修位置,同时滑轨长期在渣池酸性环境,有腐蚀与卡塞情况,丝杆张紧需要的扭力非常大。其次,链条跑偏调整需要在捞渣系统满负荷运转过程中进行。因此,链条过长与跑偏情况时有发生,链条的磨损与损伤大大降低了输送链的寿命。借鉴传统链斗式提升机张紧装置经验,将张紧装置设置在头轮组的位置,结构如图7所示。利用两个蜗轮蜗杆机构分别调整两条输送链的张紧度,同时实现了链斗捞渣机负荷运转时跑偏的调整。
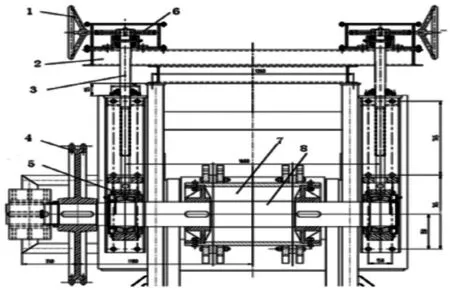
图7 改进后的头轮张紧装置
3.3 尾轮组的改造
链斗捞渣机尾轮组长期处于渣池中运行,工作环境很恶劣。前期设计为了防止带温的酸性水对轴承的影响,对密封性考虑得非常多,却带来了诸多未预想到的问题:整个尾轮组制造装配要求非常高;给脂装置长期处于温度较高的渣水中,造成润滑脂变硬,堵塞管道,无法达到加脂的目的;轮齿装配紧密需要足够大的力才能使尾轮齿旋转,加上张紧装置不能适时对输送链张紧,尾轮齿基本处于不能旋转的状态,增加了输送链条与轮齿的磨损(链条与轮齿之间滚动摩擦变成了滑动摩擦)等。改造前尾轮结构如图8所示。
通过链斗捞渣机运行发现,渣水温度在60°左右,尾轮轴承所处位置深度不超过2 m,水温水压对轴承座影响不会太大。因此,只要保证尾轮组装配与运行期间轴承座腔内充满足够多的润滑脂,采用普通轴承座加上双层橡胶骨架油封就可以满足要求。改进后的尾轮组结构如图9所示。改进后的尾轮组不但结构简单,制造费用低,而且确保轴承不会受到影响,尾轮组也一直处于旋转状态。

图8 改进前的尾轮组
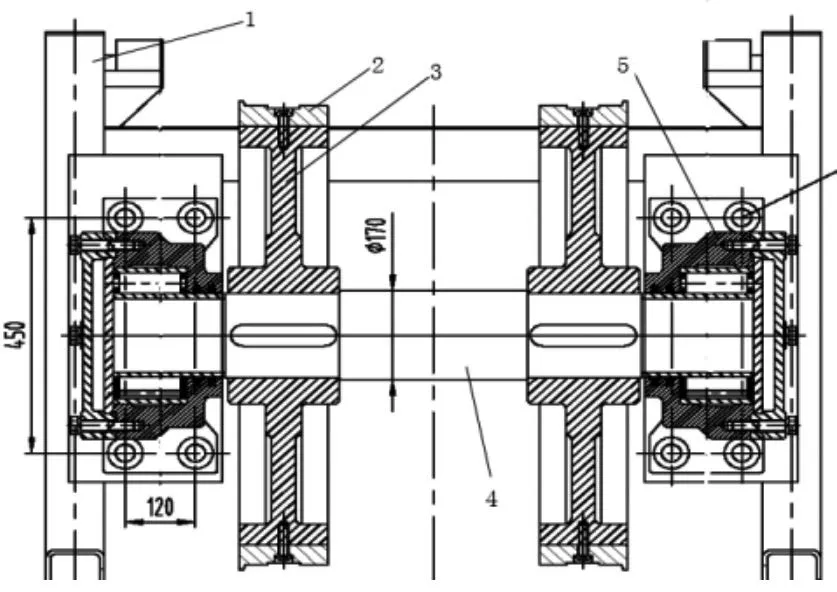
图9 改进后的尾轮组
4 结语
新型链斗式提升机采用了有可移动式机体、捞渣量可控的自动控制系统,轴销型输送链能满足现场生产的需要,达到新型链斗式提升机开发的目的。通过几年的生产实践,随着链斗的优化以及张紧装置和尾轮组改进的完成,链斗捞渣机运行平稳性得到大幅提高,取得了较好的经济效益,同时在铜冶炼行业得到了推广,取得了良好的社会效益。
猜你喜欢
山东冶金(2022年4期)2022-09-14 09:00:00
机械设计与制造工程(2022年6期)2022-07-20 07:56:20
电子乐园·上旬刊(2022年5期)2022-04-09 21:19:35
电力设备管理(2022年2期)2022-02-17 05:58:48
设备管理与维修(2021年13期)2021-09-05 13:05:50
中国自行车(2018年9期)2018-10-13 06:17:04
中国自行车(2018年7期)2018-08-14 01:52:56
中国自行车(2018年7期)2018-08-14 01:52:54
中国自行车(2017年1期)2017-04-16 02:54:06
山西煤炭(2015年4期)2015-12-20 11:36:20