新型无刷电励磁电机操动机构设计与试验研究
2018-11-09 03:18:54刘爱民
大电机技术 2018年5期
刘爱民,李 博,于 浩,袁 野
新型无刷电励磁电机操动机构设计与试验研究
刘爱民,李 博,于 浩,袁 野
(沈阳工业大学电气工程学院,沈阳 110870)
为了简化电机操动机构的结构并提高其工作可靠性,本文以40.5kV真空断路器为研究对象,依据其动态机械特性设计一种新型无刷电励磁电机操动机构。对40.5kV真空断路器进行负载特性分析,并利用断路器负载反力曲线对所提出新结构电机进行了三维有限元分析。在此基础上搭建了操动机构控制系统硬件平台,制作40.5kV真空断路器样机以及新型无刷电励磁电机样机,并对其进行联机合闸试验操作。仿真与试验结果均满足40.5kV高压真空断路器的合闸技术要求。验证了新型无刷电励磁电机操动机构的可行性。
无刷电励磁电机;40.5kV真空断路器;新结构电机操动机构;三维有限元;控制系统;联机试验
0 前言
高压断路器作为电力系统的重要开关设备,具备控制和保护双重功能。其中操动机构作为断路器的主要运动部件,直接影响断路器工作的可靠性和稳定性。传统的操动机构主要有电磁操动机构、气动操动机构、弹簧操动机构、液压操动机构等[1-4]。由于传统操动机构零部件比较多,结构比较复杂,所以其工作的可靠性不高。电机操动机构是一种新型的操动机构,相比较传统操动机构,电机操动机构不仅机构简单,稳定性好,且运动速度可控,这大大提高了电机操动机构的稳定性[5-7]。
本文针对40.5kV真空断路器,设计了一种新型无刷电励磁电机操动机构。完成了如下研究工作:对操动机构进行了运动和负载特性分析,在此基础上通过有限元对新型无刷电励磁电机本体模型进行仿真分析,并对新结构电机的中央电励磁线圈通电时对合闸操作的影响作了仿真分析与叙述。依据40.5kV真空断路器的特性搭建了操动机构硬件控制系统平台,最后,对新型无刷电励磁电机和断路器进行联机试验。
1 电机操动机构简述
1.1 电机操动机构基本结构
本文以40.5kV高压真空断路器为研究对象,并根据断路器的操动技术指标设计新型无刷电励磁直流电机操动机构。高压断路器主要机械技术参数见表1。

表1 40.5kV高压真空断路器的主要机械技术参数
40.5kV高压真空断路器操动机构结构如图1所示,断路器操动机构主要由驱动电机、控制器和传动机构三个部分组成。拐臂、拉杆等结构由电机带动,从而驱动断路器动触头上下运动,利用此种传动机构可将断路器动触头的直线运动类比为电机旋转运动,完成断路器的分合闸操作。

图1 40.5kV高断压路器电机操动机构结构简图
1.2 电机操动机构运行原理及分析
在电机操动断路器分合闸操作过程中,以合闸过程为例,合闸能量主要由电机提供,需要克服操动机构的重力、触头反力和弹簧反力。其合闸过程由动触头运动的开距阶段和压缩弹簧的超距两个阶段。在图2中,O点为转轴,OA为拐臂,AC为拉杆,CBD为三角拐臂,电机旋转由转轴带动拐臂、拉杆运动,再通过拉杆带动三角拐臂转动,进而使动触头上下运动。
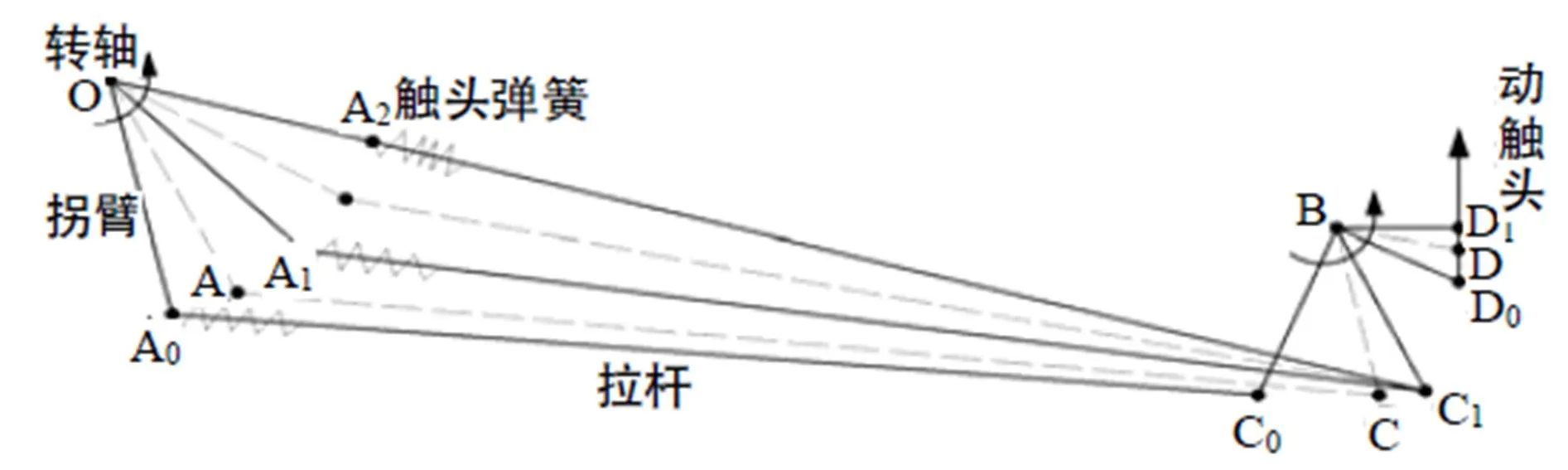
图2 40.5kV高压断路器传动机构运动图

图3为动触头行程与电机转角的关系,OA为开距阶段,行程为25mm,A点为刚合点,AB为超距阶段,此时动触头碰到静触头,所以位移不变,系统需要压缩弹簧运动。在合闸过程结束时,弹簧会被压缩一定距离,为触头提供预紧力,它可以作为分闸时的一部分能量。断路器的分闸过程与此过程相反。

图3 动触头行程与电机转角的关系曲线
1.3 电机操动机构负载特性研究
高压真空断路器的驱动电机必须满足断路器负载特性以符合分合闸的要求,操动机构的负载特性主要为负载反力特性。负载反力包括系统重力、弹簧弹力、自闭力以及摩擦力,为了更好的研究负载特性,本文不计摩擦力的影响。40.5kV高压真空断路器动触头行程为25mm,超距阶段为10mm。触头弹簧初始压力为2000N,超距阶段结束触头弹簧压力为3000N,触头自闭力为200N。
通过叠加原理对断路器负载进行等效归算,可得到折算到电机主轴侧断路器的等效负载转矩曲线如图4所示。在合闸过程中,电机转角在0°~36°时,负载转矩较小,此时为开距阶段,驱动电机只需要克服触头自闭力和系统重力的作用。在电机转角为36°时,此时进入超距阶段,动静触头接触,弹簧弹力作用到电机主轴上,负载转矩突然增大,最大值达到311N∙m,这为驱动电机峰值转矩的设计提供了依据。
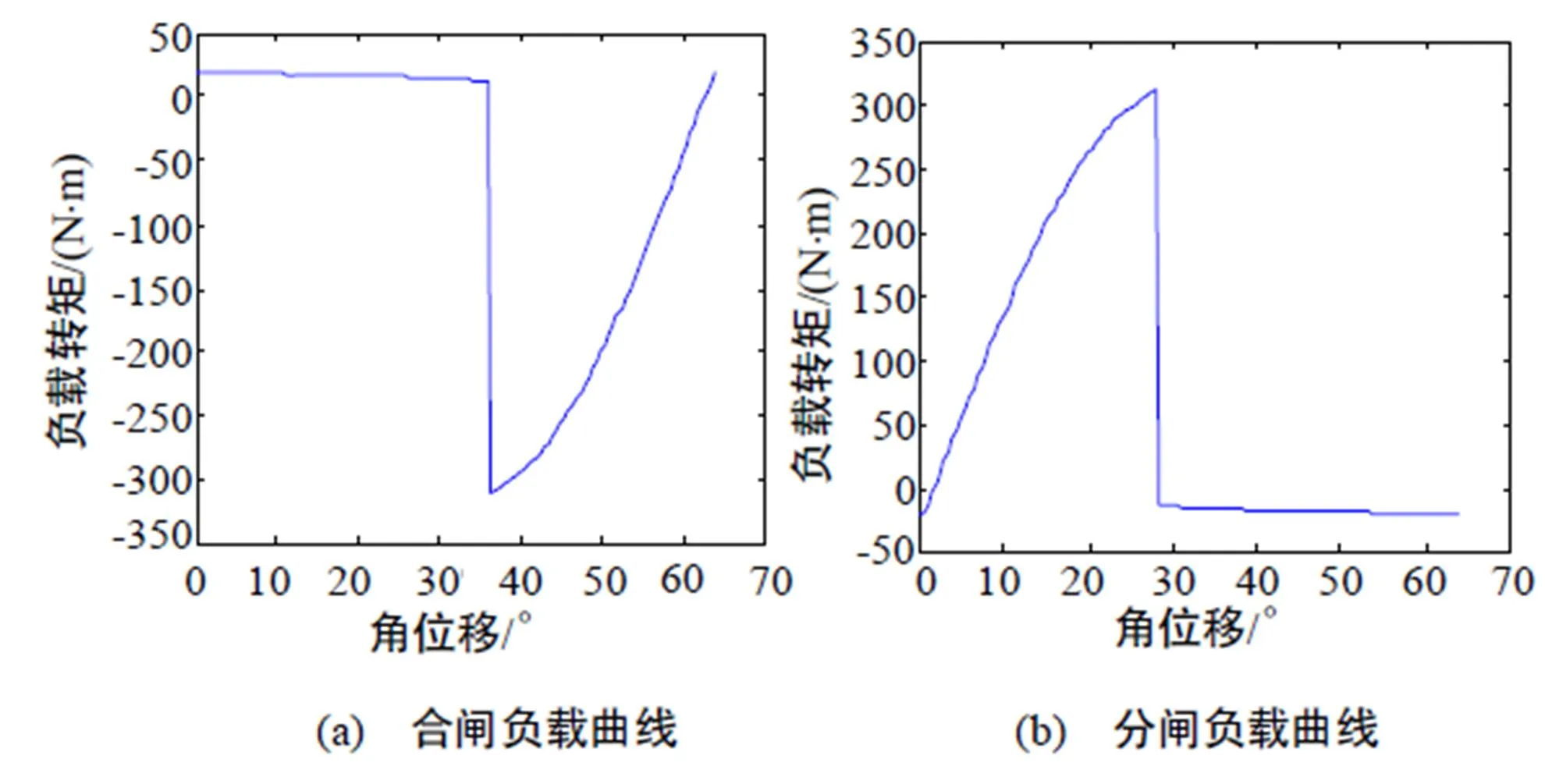
图4 等效负载曲线
2 新型无刷电励磁电机仿真分析
2.1 新型无刷电励磁电机的优势
新型无刷电励磁电机作为电机操动机构的核心,直接影响操动机构的运动特性,所以驱动电机需要满足机械响应时间短、启动转矩大、转矩脉动小、系统稳定性好等要求。新型无刷电励磁电机是一种9/6式双凸极电机,采用双套定转子结构,其结构主要由定子、转子、转轴、机壳和绕组五部分组成,其中绕组又分为缠绕在定子上的励磁绕组和固定于转轴的中央电励磁线圈。新型无刷电励磁电机三维结构如图5所示。

图5 新型无刷电励磁电机三维结构图
此外,电机运行主要由励磁绕组通电产生使电机旋转的电磁转矩,对中央电励磁线圈通入不同电流时,会调节定子气隙的磁通,从而影响电磁转矩,增大电机的转矩调节范围,从而也扩大电机的调速范围。
2.2 新型无刷电励磁电机仿真分析
本文依据断路器负载特性曲线,利用三维有限元仿真软件ANSYS对断路器分合闸操作进行动态仿真分析。图6给出了电机操动机构实现分合闸操作时,驱动电机的角位移与电机电磁转矩的仿真曲线。可以看出合闸时间为28.8ms,分闸时间为27.2ms,电磁转矩最大值为311N·m,电机转角为63°。通过仿真分析可以得出,驱动电机的电磁转矩满足40.5kV高压真空断路器负载曲线的要求,电机的设计满足操动机构对电机本体的要求。

在中央电励磁线圈分别通不同电流时,其动态特性对比如图7所示。

图7 中央电励磁线圈通电的合闸特性
分别给中央电励磁线圈通-6A,-3A,0A,3A,6A的电流,可以看出新型无刷电励磁电机在驱动高压断路器合闸操作时最大转矩分别为295.6N·m,300.5N·m,312.2N·m,326.7N·m,336.5N·m,完成一次合闸操作的时间分别为30.1ms,29.2ms,28.7ms,27.2ms,26.8ms,可以得出给中央电励磁线圈通电起到增磁或者减磁的作用,中央电励磁线圈通入正电流,转矩峰值增大,合闸时间变短;中央电励磁线圈通入负电流,转矩峰值减小,合闸时间变长,验证了电机中央电励磁线圈的调磁效果,扩大电磁转矩调节范围,提高驱动电机的动态调速特性。综上所述,给中央电励磁线圈通电可实现调节新型无刷电励磁电机的转矩及合闸速度。
3 新型无刷电励磁电机操动机构控制系统设计
3.1 控制系统电路设计
本文以40.5kV高压真空断路器为研究对象,设计了新型无刷电励磁电机操动机构控制系统。控制系统以数字信号处理器DSP28335为核心,辅以电源模块、整流模块、功率变换器模块、及信号采集模块等共同组成。图8所示为控制系统原理框图。

图8 控制系统原理框图
整个控制系统原理如图所示:三相交流电通过整流桥再经过电容模块进行滤波、储能后给电机三相绕组进行供电;电机转子位置、转速以及三相电流通过信号采集模块把信号传输给DSP处理器,DSP根据转子位置信息输出对应相的PWM信号到驱动模块,驱动功率变换器各个开关器件的导通与关断状态,完成电机对应相的控制;DSP根据检测到电机转速和电流信息,以及系统给定转速对PWM脉冲信号的占空比作出调整,从而实现控制系统对新型无刷电励磁电机操动机构的运动控制。
3.2 功率变换器模块
功率变换器模块是整个控制系统非常重要的组成部分,电机换相需要依靠功率变换器模块来实现。本文设计了三相半桥不对称功率变换器,其拓扑结构如图9所示。

图9 三相半桥不对称功率变换器拓扑结构
三相半桥不对称功率变换模块对应与样机的励磁;绕组相连,三个桥臂分别对应电机的三相励磁绕组,每个桥臂由两个开关及两个续流二极管组成。以一相绕组为例,若控制K1、K2导通,则VD1、VD2处于截止状态,则A相绕组通电,若A相关断即K1、K2不导通,此时VD1、VD2处于续流状态,起到了保护电路的作用。
3.3 信号采集模块

4 联机试验
以40.5kV高压断路器为试验对象搭建新型无刷电励磁电机操动机构联机试验平台如图10所示。包括新型无刷电励磁电机样机本体、40.5kV高压断路器样机、三相调压器、三相整流桥、电容电阻、核心数字信号处理器DSP28335、功率变换器模块、信号采集模块、IGBT驱动芯片、升压芯片以及电源模块等。三相绕组电流通过霍尔传感器采集电压信号之后传输到示波器上显示。

图10 新型无刷电励磁电机操动机构试验平台
对新型无刷电励磁电机操动机构进行合闸操作试验,电容器组的充电电压为250V、电容器组的容量为132000uf、PWM占空比为90%。图11所示为断路器合闸试验验结果,如图11中(a)所示,动触头行程为25mm,B点为刚合点,动触头运行至刚合位置B的时间是30.45ms。B之前为开距阶段,B之后为超距阶段,可以看出在超距阶段,由于弹簧反力的增大及触头接触碰撞导致行程曲线波动。合闸速度是刚合位置之前3/4行程内的平均速度,所以合闸速度是1m/s,联机负载试验比仿真结果稍有延时,但合闸操作仍在50ms内完成。如图11中(b)所示合闸操作电机转过的角度为63°。

图11 试验结果
图11中(c)为三相绕组电流,合闸峰值电流为152A。试验结果符合40.5kV高压断路器合闸技术要求,证明了电机操动机构的可行性。
5 结论
(1)本文针对40.5kV高压真空断路器进行了运动分析,通过叠加原理对其负载反力特性进行了归算,然后利用三维有限元软件ANSYS针对断路器负载特性对新型无刷电励磁电机进行仿真分析。
(2)本文以40.5kV高压断路器为研究对象,搭建新型无刷电励磁电机操动机构控制系统平台并对其进行联机试验,试验结果测得合闸时间为50ms,合闸平均速度为1m/s,合闸峰值电流为152A。试验结果满足40.5kV高压断路器的合闸技术要求,证明了新型无刷电励磁电机操动机构的可行性。
[1] 李艳飞. 断路器新型磁力操动机构的研究[D]. 大连理工大学, 2009.
[2] 陈保伦. 液压操动机构设计[J]. 电气工程学报, 2009(4):48-54.
[3] 陈保伦, 文亚宁. 断路器弹簧操动机构介绍[J]. 高压电器, 2010, 46(10):75-80.
[4] 魏忠永. 超高压断路器液压操动机构的优化设计[D]. 浙江大学, 2010.
[5] 杨涛, 黄瑜珑, 李大卫,等. 高压断路器电机操动机构技术的研究[J]. 清华大学学报(自然科学版), 2010(4):521-524.
[6] 李永祥, 林莘, 徐建源. 高压断路器永磁无刷直流电机操动机构的设计及动态仿真[J]. 电网技术, 2010, 34(1):185-189
[7] 李永祥, 林莘, 马跃乾,等. 高压断路器新型电机操动机构的研究[J]. 电气技术, 2008(9):78-83.
New Brushless Electric Excitation Motor Operating Mechanism Design and Experimental Research
LIU Aimin, LI Bo, YU Hao, YUAN Ye
(School of Electrical Engineering, Shenyang University of Technology, Shenyang 110870, China)
In order to simplify the machine structure and improve the working reliability of the operating mechanism, taking the 40.5kV vacuum circuit breaker as the research object, a new type of brushless excitation motor operating mechanism is designed according to its dynamic mechanical characteristics.The load characteristics of the 40.5kV vacuum circuit breaker are analyzed, and the three-dimensional finite element analysis of the new structure motor is carried out by using the load reaction curve of the circuit breaker. On this basis, the hardware platform of the control system of the operating mechanism is built, the prototype of the 40.5kV vacuum circuit breaker and the prototype of the new brushless excitation motor are made, and the operation of the closing test verification is carried out. The simulation and test results meet the closing technical requirements of 40.5kV high voltage vacuum circuit breaker. The feasibility of the new brushless excitation motor operating mechanism is verified.
brushless electric excitation motor; 40.5kV vacuum circuit breaker; new structure motor operating mechanism; three-dimensional finite element; control system; test verification
TM311
B
1000-3983(2018)05-0058-05
2018-06-04
刘爱民(1961-),沈阳工业大学,从事智能控制、特种电机及其驱动系统研究,教授。

国家自然科学基金(51777131)
猜你喜欢
河北电力技术(2021年2期)2021-07-29 09:16:30
电子制作(2018年14期)2018-08-21 01:38:34
电子制作(2018年10期)2018-08-04 03:25:02
电子制作(2018年1期)2018-04-04 01:48:34
电子制作(2017年8期)2017-06-05 09:36:15
大电机技术(2017年3期)2017-06-05 09:36:02
电子制作(2017年20期)2017-04-26 06:57:59
电测与仪表(2015年20期)2015-04-09 11:53:46
水电站机电技术(2014年4期)2014-10-13 08:30:12
水电站机电技术(2014年4期)2014-10-13 08:30:07