深水水下步履式整平机的研发
2018-11-09 08:38:36华寅超
建筑施工 2018年7期
华寅超
中船第九设计研究院工程有限公司 上海 200063
水下抛石基床整平是重力式码头工程、航道整治工程等水工工程的重要施工工序之一。水下步履式整平机正是为此所研制的,它能在各种人力无法完成施工的条件下高质量、高效率地完成任务[1-4]。
然而目前水下整平机工作的最大水深极限为30 m,世界上工作水深最深的整平机可达到35 m。如果要适应更深的水下施工环境,将面临水压、水流、波浪、水下稳定性、安全性等种种难题,是一个量变到质变的跨越。深水水下步履式整平机突破了30 m工作水深这一技术壁垒,研发出能在50 m水深条件下工作的整平机,以适应现今水深日趋加深的抛石基床整平工况。
1 水下步履式整平机简介
1.1 水下步履式整平机组成
水下步履式整平机主要由主体结构、动力系统、定位检测系统和控制系统等组成。
1.1.1 主体结构
整平机主体结构主要由电控动力室、塔架、机身、刮铲系统等组成(图1)。
1.1.2 动力系统
整平机采用液压系统作为设备的动力系统,主要由动力源、液压泵站、液压电动机、油箱、液压油缸、液压管路和阀组等组成。
1.1.3 控制系统
整平机控制系统由工控机、可编程控制器(PLC)、各类按钮组成,集中布置在中央控制台上。
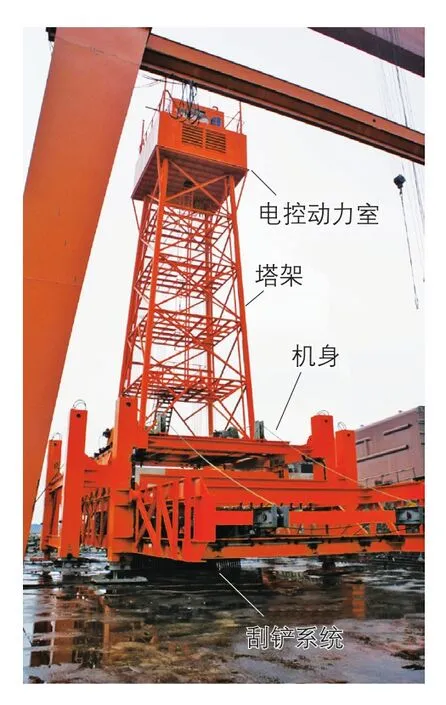
图1 水下步履式整平机主体结构
1.1.4 定位检测系统
整平机的定位检测系统主要设备有测深仪、倾斜仪、角度仪、RTK GPS、位置传感器、液压系统压力传感器等。通过这些仪器,操作人员在控制台上能精确掌握整平机的绝对坐标、姿态情况、执行机构位置及状态、抛石基床标高等,指导其进行整平机施工操作。
1.2 水下步履式整平机工作原理
操作人员控制整平机步行至指定工作区域,站稳并调平机架。通过塔架上的GPS及整平台车下方测深仪的数据反馈,系统计算出整平区域抛石基床的绝对高程。操作人员根据施工要求控制刮铲对基床进行多次刮平,直至抛石基床的平整度和标高达到施工要求,而后采用压辊装置进行基床压实。一个工作面的整平完成后,整平机采用步进方式通过纵向或横向移动抵达下一个工作平面。
2 深水水下整平机技术参数
2.1 工作环境参数
水流及波浪是整平机工作的自然环境条件参数,是影响整平机稳定性最主要的外部因素,通过对所收集的国内航道及沿海地区水域资料数据进行分析,并参考文献[1]中介绍的深水抛石整平船“青平2号”的整平工作环境参数,以此为基础制定深水整平机工作环境参数:最大工作水深50 m,最大工作水流2 m/s,最大工作浪高1.2 m,最大抗浪水流3 m/s,最大抗浪浪高2.5 m/s。
2.2 工作能力参数
日整平作业面积500 m²,整平精度5 cm,适用石块质量5~100 kg。
3 深水水下整平机方案
3.1 方案分析
整平机依靠其机身上部的塔架把GPS天线送出水面以上,从而实现整平机的定位及整平面精度的测量。深水水下整平机其难点在于:
1)整平机在水下受到波浪及复杂水流等因素的影响,当整体高度超过50 m后,会产生较大的倾覆力矩,造成整平机稳定性问题。
2)50 m高度的整平机在下水和出水时会给整机吊装带来极大的难度。
对于上述设计难点,解决方式如下。
3.1.1 减小整平机的倾覆力矩
整体高度增大后,由于上部塔架结构离开整平机撑腿距离变远,力臂增大,其承载的水流力的作用效果被放大,塔架受水流力的力矩增大是引起倾覆力矩增大的原因。故在保证结构强度和刚度的前提条件下尽可能地减少上部塔架结构的水阻力。因此减小整平机的倾覆力矩的关键在于减小塔架的水阻力。
根据JTS 144-1—2010《港口工程荷载规范》“水流力”章节中的计算公式Fw=Cwρ V2A/2可以看出,水流力Fw和水流阻力系数Cw、水密度ρ、水流设计流速V、计算构件与流向垂直平面上的投影面积A成正比关系。当外部条件水密度和水流设计流速一定时,要减小水流力就要减小水阻力系数和构件与流向垂直平面上的投影面积。又根据各不同形状墩柱的水阻系数,选用水阻系数较小又便于制造的圆形截面型材作为塔架的结构件。
3.1.2 增大抗倾覆力矩
整平机的抗倾覆力为整平机自身重力,通过增大整平机腿间跨度从而增大抗倾覆力臂,可达到增大抗倾覆力矩的目的。
3.1.3 降低整平机整体重心高度
对于整平机的安全性,还要考虑整平机在工作条件下可能出现小角度倾斜的情况。在整平机小角度偏斜的情况下,重心位置向外偏斜,重心越高,偏斜量越大,倾斜方向上重心的力臂减少越多,抗倾覆力矩越小。因此取消塔架上部电控动力室,设计中尽可能降低塔架的重心高度。
3.1.4 降低塔架高度
过高的塔架给吊装带来巨大的操作难度,主要的解决方案是采用可伸缩式的塔架形式,尽可能地降低吊装时的塔架高度。
3.2 塔架结构设计
深水整平机塔架主要分为2个部分,分别为上部单钢管结构及下部桁架结构。
上部单钢管结构是由钢管结构、GPS天线平台、塑料浮筒组成,其上部设有一个小平台,露出水面约4 m(50 m最大水深条件下),平台用于安置2套GPS天线。小平台下方设有一个圆环形的船用塑料浮筒,套装在钢管上。
下部桁架结构是由桁架本体、钢管锁紧装置组成。其底部与整平机机身采用螺栓相连。塔架中心设有若干套筒,作为上部单管结构伸缩时的导向装置。下部结构20 m高度处设有一个平台,其上安装有一对钢管锁紧装置。构成塔架的各钢管内部封闭不进水,在水中钢管内部中空部分排水产生一定的浮力,抵消了钢管的部分自重(图2)。

图2 自适应伸缩塔架
3.3 塔架伸缩原理
为方便整平机出入水时的吊装操作,并适应不同深度水域的施工作业,整平机塔架具有可伸缩功能,并利用上部单管结构的浮筒提供浮力,通过浮力与单管结构重力的平衡,塔架的上部单管结构随着水位变化可在下部桁架结构中进行上下运动,从而实现塔架高度的自适应调节,并保证GPS天线始终露出水面。
塔架的上部单管结构为塔架升降的主体,其顶部设有浮筒。浮筒没入水中所产生的最大浮力略大于上部钢管与浮筒自重的总和,因此带动上部结构浮出水面,达到在不同的水位条件下自动调节塔架伸缩高度的目的。当高度调节到位后,下部塔架平台上的钢管锁紧装置锁紧油缸伸出,完成钢管锁定。钢管锁紧装置分为左右两部分,分别由2个液压油缸驱动,液压油缸前端各设半个抱箍,顶伸到位后抱箍抱紧(图3)。

图3 钢管锁紧装置
起吊时,锁紧装置松开,整平机吊耳安装在机身上,当整平机被缓缓地起吊出水,其塔架上部钢管随出水过程慢慢收回,直至上部单管完全进入下部桁架结构内部,塔架回收完成。整平机总高度从50 m减小到36 m。
采用以上形式,整平机塔架具有自重增加少(在水中有浮力的条件下)、迎水面积小、重心较低、可自适应伸缩等特点,很好地解决了整平机塔架出水方案的主要技术难点。
4 设计验证
本设计要解决的核心问题是整平机的水下稳定性问题,设计是否满足稳定性的要求须进行验证。整平机下部机身及其上设备结构形式复杂,水流通过此类复杂结构会引起湍流,湍流对整平机机架的实际影响很难通过计算公式算得。因此采用CFD仿真计算的方式计算整平机的水下稳定性。并用ANSYS结构有限元分析,对伸缩塔架结构在水流作用下的刚度进行了计算。
4.1 CFD仿真计算
整平机上部塔架结构由于结构形式比较单一,通过公式计算即可得到较为准确的受力结果。整平机下部复杂的机身本体则需要借助试验或CFD软件帮助来进行计算。
经计算:工作状态下,在设计最高水流速度2 m/s时,整平机的稳定性具有一定的富余量;在水流速度达2.85 m/s时,为整平机工作状态下具备合格稳定性的临界状态。抗浪状态下,在设计最高水流速度3 m/s时,整平机的稳定性具有一定富余量;在水流速度达到4 m/s时,为整平机抗浪状态下具备合格稳定性的临界状态。
4.2 塔架结构受力分析
由于塔架结构是作为GPS天线的支撑架体,而GPS为整平机进行水平和高程方向上的定位的核心设备,更是保证整平机作业精度重要的一环,因此塔架受水流力后的变形量是设计必须考虑的问题。整平机水平方向的定位精度要求不高,而在高程方向上,由于是作为基床绝对高程的测量仪器,其必须保证整平机高程方向的施工精度在5 cm以内。因此塔架受水流和波浪的作用后在纵向的位移不能过大,否则会影响GPS对抛石基床高程的正确测量。
将CFD计算所得的水流力力矩数值及计算公式算出的波浪力力矩数据导入到ANSYS结构分析模块中进行计算。考虑设备在实际的运用中只需关注工作状态下的GPS高程精度,因此只计算2 m/s流速下塔架的变形量。
建模加载后对塔架刚度进行计算,根据塔架在高程方向上的变形量可知,其最大位移量为5.78 mm(图4);根据塔架在水平方向上的变形量可知,其最大位移量为134.40 mm(图5)。由于塔架高度高,其一旦产生小角度偏斜,顶端横向位移将被成倍放大,而纵向的位移却不明显。根据计算数据,在最大工作水流力及波浪力的作用下,高度方向的最大变形量在毫米级,对GPS高程测量影响很小,满足设计要求。
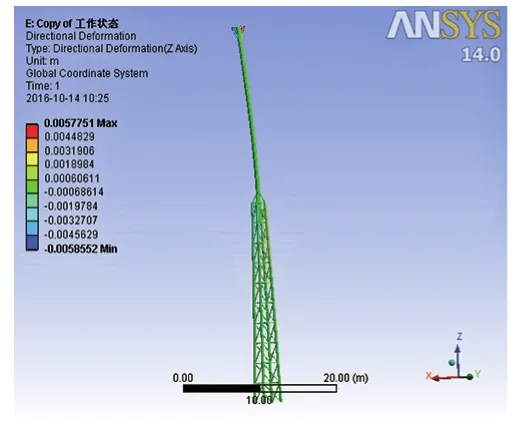
图4 塔架结构高程方向位移
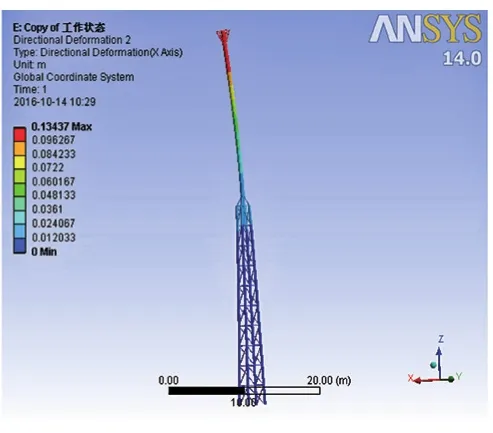
图5 塔架结构水平方向位移
5 结语
通过改造整平机的塔架形式,取消原塔架上部的电控动力室(将其安置于工作母船上),把塔架的功能定位于只负责将GPS天线托出水面。根据这一特点,在刚度满足要求的条件下,尽可能减少塔架的水阻系数及迎水面积来减小整平机所受的倾覆力矩。并考虑了机体高度过高不利于吊装的问题,设计了自适应型的塔架伸缩系统,大幅度提高了设备在运输及使用过程中的安全性与可操作性。并经计算验证,本设计方案在各工况条件下都满足整平机稳定性的要求,并有足够的安全系数。对绝对高程方向上的精度影响也较小,满足定位精度要求,解决了深水水下整平机在50 m水深条件下进行正常施工作业的技术难题。
猜你喜欢
中国港湾建设(2022年12期)2022-12-28 05:28:14
中国港湾建设(2022年12期)2022-12-28 05:27:46
上海航天(2022年5期)2022-12-05 01:55:46
港工技术(2021年4期)2021-08-25 05:22:54
铁道建筑技术(2021年4期)2021-07-21 05:32:54
建材发展导向(2021年9期)2021-07-16 07:11:34
中国港湾建设(2017年11期)2017-12-19 12:27:08
中国港湾建设(2017年11期)2017-12-19 12:27:07
工程建设与设计(2016年2期)2016-08-22 09:13:06
石油化工建设(2015年6期)2015-12-01 04:17:34