
基于物联网的汽车智能防盗系统实验教学平台设计
2018-11-08 09:02丁兴亚撒韫洁
实验技术与管理 2018年10期
沈 刚, 蔡 强, 丁兴亚, 撒韫洁
(中国矿业大学 机电工程学院, 江苏 徐州 221116)
为防止汽车被盗,汽车制造企业非常重视汽车防盗系统的设计和配置,传感器技术、无线传感网络技术、数据处理技术和生物识别身份验证技术[1-5]等被广泛应用于汽车防盗系统。基于物联网的汽车智能防盗系统实验教学平台利用ZigBee技术、嵌入式技术、GSM/GPRS技术、GPS技术、人脸识别技术、地图定位技术和Web技术等开发。该平台各功能模块相对独立,学生可分阶段、针对性地学习和进行功能拓展。
1 汽车智能防盗系统架构设计
系统架构分为采集传输层、车载控制器层和远程监控层(见图1),具备汽车状态监测、远程控制报警和人脸识别验证功能。
(1) 采集传输层。该层的功能是实时监测汽车的车况。根据汽车被盗的几种常见情形,用霍尔传感器进行车门开关检测,用振动传感器进行车体振动检测,用微波传感器和红外传感器进行人体目标监测[6]。采集的数据经过初步处理以后,通过ZigBee无线传输网络定时发送到车载控制器层的ZigBee协调器。
(2) 车载控制器层。车载控制器层具有多项功能,包括:读取ZigBee协调器接收的采集传输层定时发送的数据,若发现异常情况则立刻开启短信报警;通过GPRS模块,将传感器解析处理后的数据和GPS定位信息与远程监控层的云服务器进行数据交换,并支持反向控制;摄像头采集驾驶室的图像,通过人脸识别技术对人员身份进行验证,并根据身份验证结果或远程监控层的反向控制命令来控制车辆启动电路。
(3) 远程监控层。汽车防盗监控系统用于车况信息的发布和车主的反向控制。车况信息包括各监测项是否有异常和车辆的地图定位信息;反向控制包括报警功能的开关和是否允许身份验证通过。
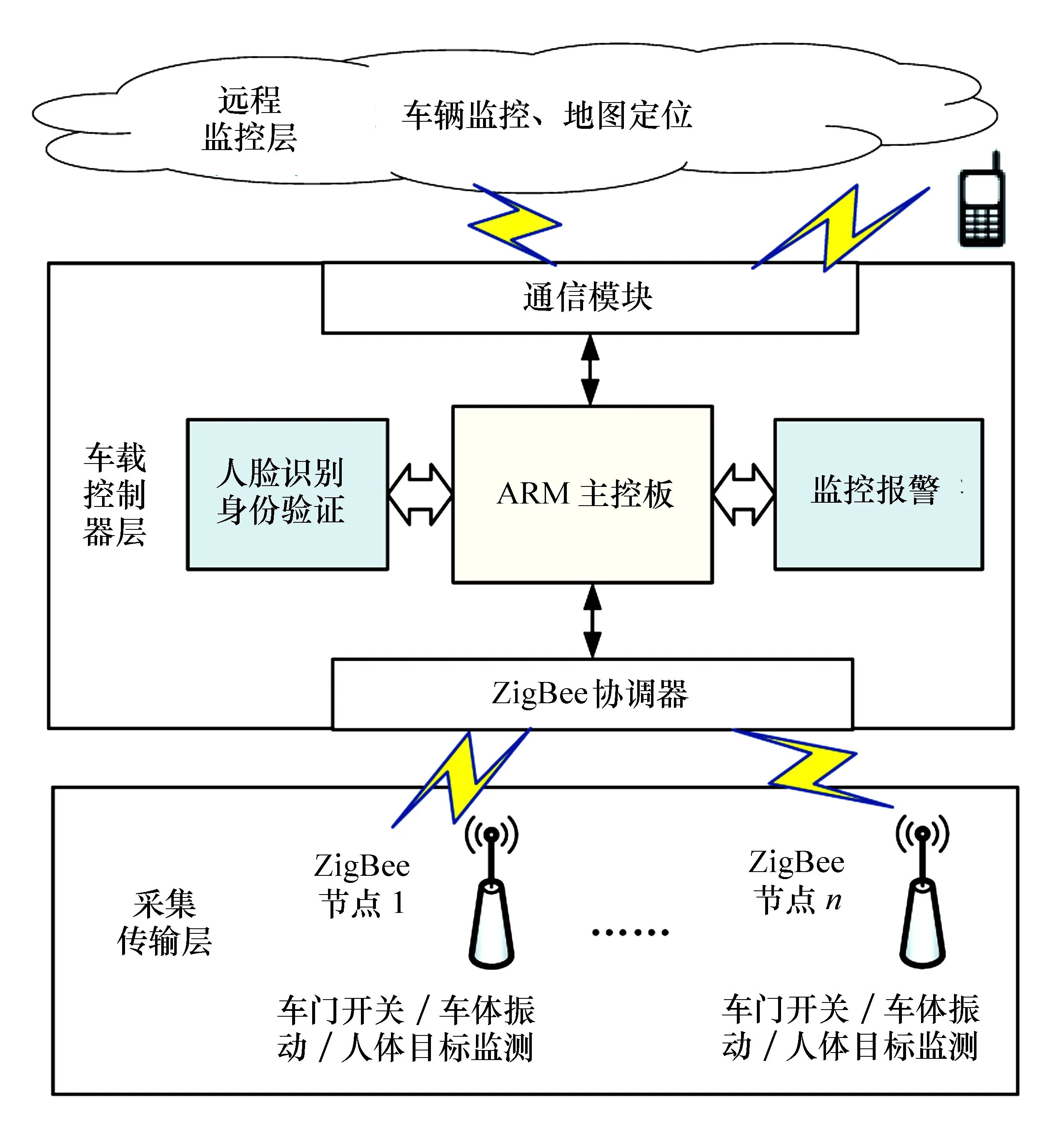
图1 汽车防盗系统总体架构图
2 汽车智能防盗系统硬件设计
系统采用模块化设计,主要是采集传输节点的设计和车载控制器的设计。传感器采集传输节点包括传感器模块、ZigBee传输模块和采集节点底板(见图2);车载控制器包括ZigBee协调器、GSM/GPRS模块、GPS模块、USB摄像头和ARM主控板。传感器信号经过各自模块的调理电路输出到ZigBee传输模块的相应引脚。ZigBee传输模块和车载控制器中的ZigBee协调器硬件设计完全一样,采集节点底板用于为各传感器模块和ZigBee模块供电并连接对应信号的采集引脚。GSM/GPRS模块使用ATK-SIM900A通信模块[7],GPS模块使用ATK-NEO-6M-V23模块,两者均是高性能GPS模块。ARM主控板使用迅为公司的iTOP-4412开发板,可满足系统高性能运算的需要[8]。
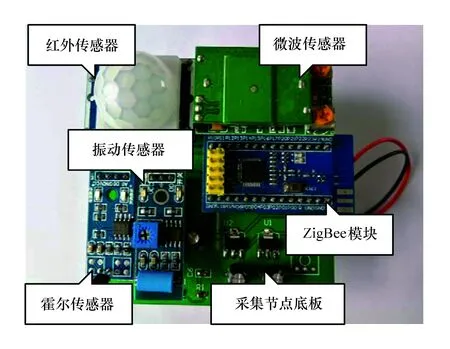
图2 传感器采集传输节点组合图
3 汽车智能防盗系统软件设计
3.1 采集传输层软件设计
ZigBee网络的创建和传感器数据采集传输功能的开发利用了TI公司的ZStack协议栈[9],与车载控制器通过串口连接的ZigBee协调器创建无线传感网络。终端节点加入创建好的无线传感网络中,采集与其连接的传感器数据,并将数据传输到ZigBee协调器。传感器数据采集传输流程见图3。
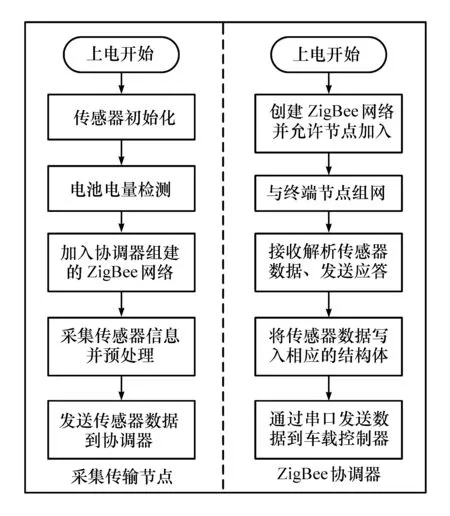
图3 传感器数据采集传输流程图
3.2 车载控制器层软件设计
车载控制器层采用了Linux操作系统,通过多任务方式开发监控报警子系统和人脸识别身份验证子系统。监控报警子系统包括ZigBee协调器数据的接收处理、GPS数据的接收处理、Socket网络通信和短信报警,其中Socket网络通信中包含了继电器控制。其流程如图4所示;人脸识别身份验证子系统包括图像采集和人脸的检测识别、图像保存显示,其流程如图5所示。通过GPRS模块与远程监控层的云服务器建立Socket网络通信进行数据交互。

图4 监控报警子系统各任务流程图
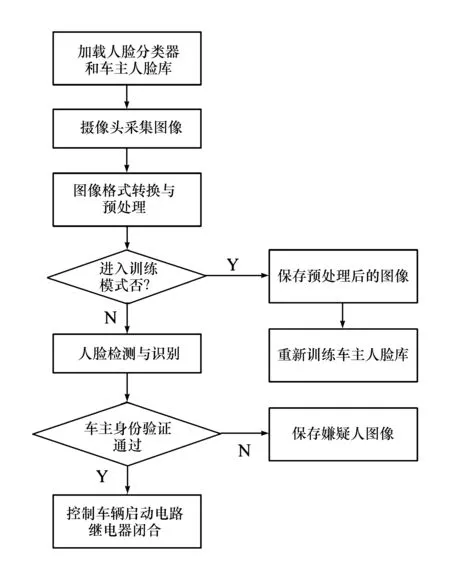
图5 人脸识别身份验证流程图
3.3 远程监控层设计
远程监控层位于租用的阿里云ECS云服务器。云服务器提供简单、高效的计算服务,可快速构建稳定、安全的应用,提升运维效率、降低IT成本[10]。服务器与车载控制器的GSM/GPRS模块建立网络连接后,接收车载控制器上传的数据并解析存储到MySQL数据库,Web界面通过查写数据库实现实时车况显示、反向控制和地图实时定位。
汽车防盗监控系统实验教学平台是信息发布与反向控制平台,主要包括实时监控面板、报警关闭按钮、实时地图定位和网站备案信息4部分。信息每4 s更新一次,并将更新时间显示在监控面板上。实时监控面板的下部有报警关闭按钮,可关闭车载控制器的报警功能。地图定位是汽车防盗系统的一个重要组成部分,用户可以通过定位追踪自己的车辆,如果车辆被盗,可以根据定位信息找寻车辆。
4 结语
基于物联网的汽车智能防盗系统实验教学平台各功能模块是独立的,可拓展性好,学生可分阶段进行各种技术的专项学习,也可根据需要添加其他功能模块。在教学过程中,该平台能很好地调动学生学习、探究的兴趣,对提升学生的创新思维能力和实验动手能力以及巩固课堂理论知识起到了积极的作用。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
铁道通信信号(2020年8期)2020-02-06
军事文摘(2018年24期)2018-12-26
电子制作(2018年2期)2018-04-18
汽车维修技师(2018年10期)2018-03-14
中国公共安全(2017年11期)2017-02-06
环球市场信息导报(2016年13期)2016-12-30
电源技术(2015年2期)2015-08-22
晚报文萃(2015年6期)2015-08-12
中国神经再生研究(英文版)(2015年11期)2015-02-07
