
SZBDCORS实时定位精度研究
2018-11-08 02:41李沛鸿张远邱世聪
江西测绘 2018年3期
李沛鸿 张远 邱世聪
(江西理工大学建筑与测绘工程学院 江西赣州 341000)
1 引言
目前在我国能提供高精度定位服务的手段中百分之九十以上都是以GPS为主的基准站差分定位技术[1-2],由于单GPS系统定位精度受限于建筑物的遮挡,可视卫星数量较少等观测条件的影响,用户在山区、城市等遮挡严重的地区无法获得高精度的定位成果,大大降低了定位精度的可靠性[3-4]。随着我国北斗卫星导航系统已具备向亚太地区提供高精度定位服务的能力,多系统集成已经成为现今CORS系统建设的趋势,如何建立基于北斗的CORS系统是目前北斗系统研究和应用的热点。深圳北斗地基增强系统(SZBDCORS)是兼容北斗卫星导航系统、GPS和GLONASS卫星导航系统的多模的连续运行卫星定位服务系统。掌握不同卫星系统组合的网络RTK实时定位精度[5-6],对提高SZBDCORS定位性能具有重要作用。
本文利用天宝、南方、莱卡和攀达等不同厂商的设备获取 GPS/GLONASS、GPS/BDS、BDS、GPS 四种不同差分信号的野外实测数据,并对四种差分信号的定位精度进行比较分析。
2 方案设计
本文对SZBDCORS的四种测量工作模式RTCMGB (GPS/BDS 双 系 统)、RTCM31(GPS/GLONASS双系统)、RTCM3B(BDS单系统)、RTCM3G(GPS单系统)定位精度进行比较分析。本次实验对分布在深圳市全域的60个具有已知坐标控制点进行网络RTK观测,在测量时利用三脚架在已知点上设站,利用基座上的光学对中器或垂球进行对中,对中精度优于2毫米;量取天线的标志点到地面点标志的高度,在不同方向上量测三次,最大互差1毫米,取平均值记录。在每个测站上用四种方式测量三组数据,每个测量模式60个值,每个历元一秒采样,每次测量都要重新初始化,每个测站上记录720个数据。测试点分布图见图1。
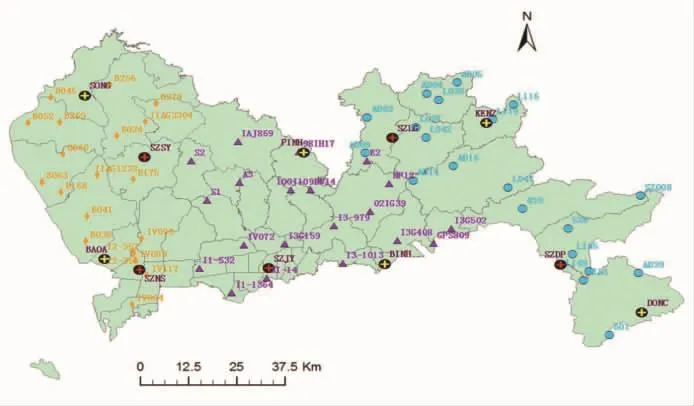
图1 网络RTK测试点分布图
3 数据处理分析
3.1 内符合精度分析
SZBDCORS实时定位的内符合精度反映了其定位结果的收敛情况,并能够评定系统的稳定性[7]。系统用户在测量作业时常常把CORS系统内符合精度作为测站点点位精度的参考指标。具体统计方法为对上述每个测量模式的三组数据共180个数据的三维坐标分量求取平均值,并将观测点的各个历元的三维坐标分量求差。坐标分量内符合中误差(MX、MY、MZ)和点位中误差 MS按照下列公式计算[8]:

上式中:(MX、MY、MZ)为坐标分量内符合中误差(cm);MS为点位内符合中误差(cm);dZ测试点坐标分量平均值与观测值分量的差值(cm);测试点点位平均值与每次观测点位的差值(cm);N测试点个数;K测试点的观测次数。
本文利用EXCEL处理野外观测数据,统计四种工作模式下的各测试点的X、Y、H方向的内符合精度并绘制图表。
1)内符合精度统计
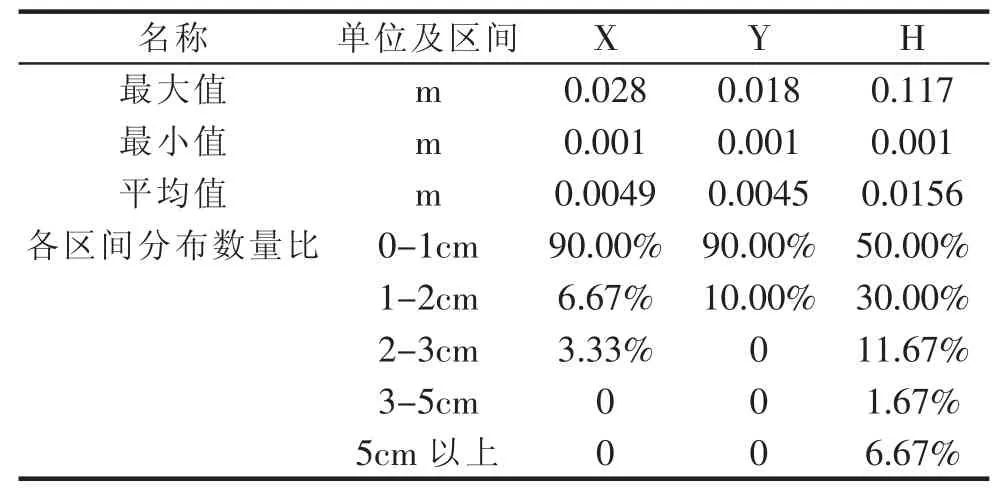
表1 RTCM3G(GPS单系统)内符合精度统计

图2 RTCM3G(GPS单系统)内符合精度分布

表2 RTCM32B(BDS单系统)内符合精度统计

图3 RTCM32B(BDS单系统)内符合精度分布
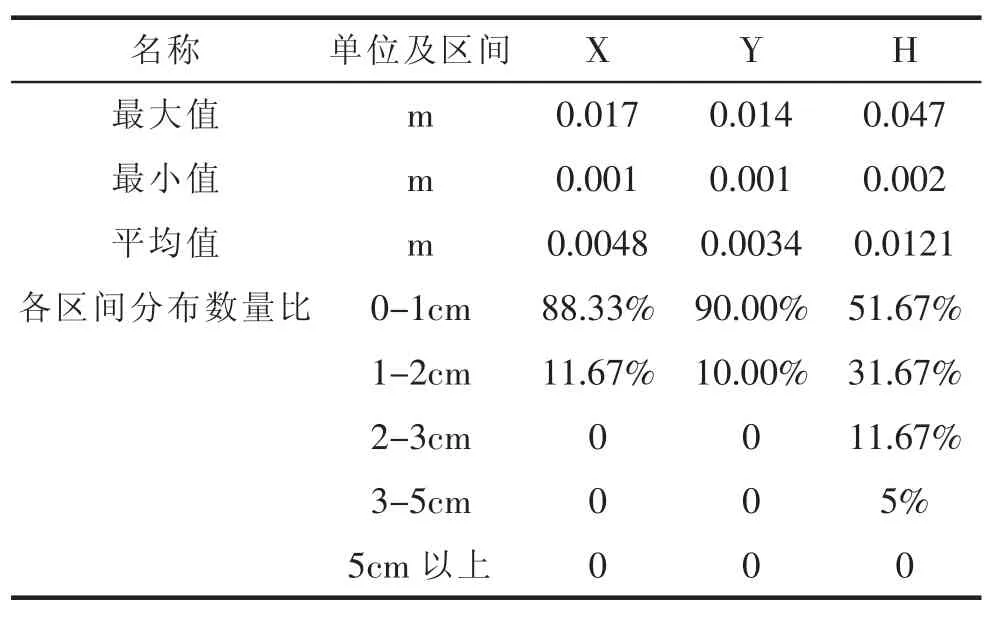
表3 RTCMGB(GPS/BDS双系统)内符合精度统计

图4 RTCMGB(GPS/BDS双系统)内符合精度分布
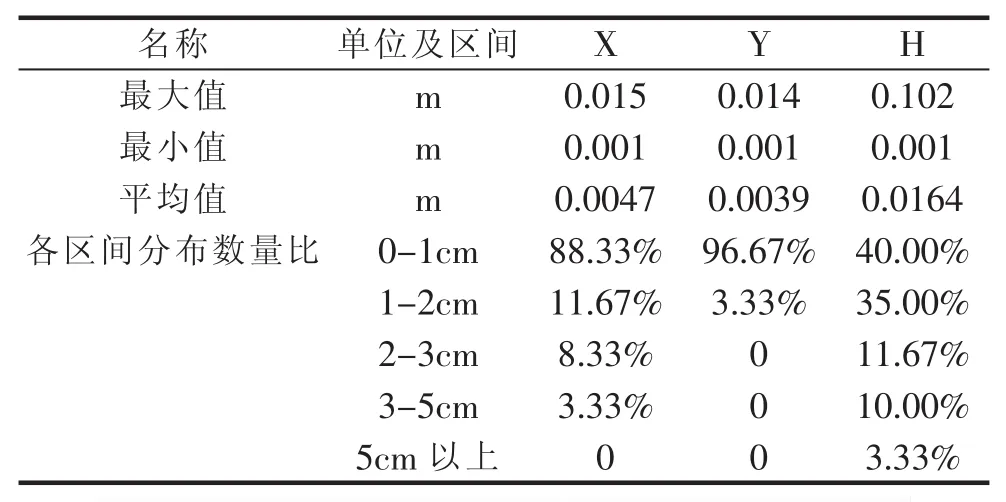
表4 RTCM31(GPS/GLONASSS双系统)内符合精度统计

图5 RTCM31(GPS/GLONASSS双系统)内符合精度分布

图6 四种模式各分量内符合精度平均值
通过对表1-4和图2-5分析得到,从整体上看,四种不同卫星信号差分模式各点位X,Y分量的内符合精度主要集中在0-1cm和1-2cm区间并且0-1cm占90%,高程方向内符合精度在2cm以内达到80%以上,总体上,X方向上的内符合精度约为0.52cm,Y方向上的内符合精度约为0.36cm,Z方向上的内符合精度约为1.64cm,说明四种差分模式的点位内符合精度分布均匀,具有较高的稳定性。对各差分模式的X、Y、H的内符合精度进行横向比较可知,H方向的内符合精度相对于平面精度较低且精度分布比较离散,其中Y方向的内符合精度最高。
由表1-4和图6可知,RTCMGB(GPS/BDS双系统)和RTCM31(GPS/GLONASS双系统)差分模式X,Y方向上的内符合精度均略优于RTCM3B(BDS单系统)、RTCM3G(GPS单系统)。RTCM31(GPS/GLONASS双系统)H方向上的内符合精度较低。在内符合精度方面RTCMGB(GPS/BDS双系统)较其他模式有优势。然而,四种差分模式各点位三维坐标分量的内符合精度差别并不大,基本处于同一精度水平上,说明我国北斗卫星导航系统有能力向亚太地区广大用户提供高精度实时定位服务。
3.2 外符合精度分析
系统的外符合精度反应了定位的准确性,测试点的平面点位外符合中误差MP按照下列公式计算[8],式中MP为测试点的平面外符合中误差(cm);测试点的已知平面坐标点位与观测的点位平均值的差值(cm);N测试点的个数。

数据处理结果如下:

表5 四种差分模式外符合精度分布统计
由表5和图7可知,四种差分模式各点的外符合精度基本保持在3cm以内,个别点位由于周围环境较差,导致移动信号差,数据链传输不流畅,经常出现数据链自动断开的情况,难以获得固定解,导致精度较差。从最大值和平均值来看四种不同卫星信号的差分模式各点位的外符合精度没有明显差别,其中RTCMGB(GPS/BDS双系统)略有优势。

图7 四种差分模式外符合精度比较
4 结束语
实验结果表明:总体上,X方向上的内符合精度约为0.52cm,Y方向上的内符合精度约为0.36cm,Z方向上的内符合精度约为1.64cm,四种差分模式各点的外符合精度基本保持在3cm以内,均达到规范设计要求。GPS/BDS双系统和GPS/GLONASS双系统差分模式X,Y方向上的内符合精度均略优于BDS单系统、GPS单系统。在内符合精度及外符合精度方面,GPS/BDS双系统较其他模式有优势。然而,四种差分模式各点位三维坐标分量的内符合精度和外符合精度差别并不大,基本处于同一精度水平上,说明完全不依赖其他系统的BDS单系统有能力向亚太地区广大用户提供高精度实时定位服务。总体上说,多系统定位比单系统定位有优势,这是由于多系统增加了可视卫星数进而有效地增强观测卫星的图形强度,从而提高定位精度和定位结果的可靠性。对于亚太地区的观测者,北斗系统卫星星座可视条件比GPS系统更好[9-10],SZBDCORS中的GPS/BDS双系统差分信号定位效果最优。
猜你喜欢
城市勘测(2022年6期)2023-01-30
导航定位学报(2022年5期)2022-10-13
水泥工程(2022年2期)2022-08-22
军民两用技术与产品(2022年1期)2022-06-01
航天制造技术(2020年4期)2020-09-11
上海大学学报(自然科学版)(2020年4期)2020-05-24
制造技术与机床(2018年12期)2018-12-23
证券市场红周刊(2018年37期)2018-05-14
浙江大学学报(工学版)(2016年10期)2016-06-05
电脑爱好者(2015年6期)2015-04-03
