
基于入侵的海洋浮标传感器应用分析
2018-11-06 04:59邱兵
电子元器件与信息技术 2018年8期
邱兵
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引言
海洋监测是研究与开发海洋资源的重要基础,同时也是保证国土安全的重要依据。当前在该领域中,海洋测量船以及调查飞机的作用不容忽视,但是随着技术的发展,海洋浮标正在扮演着越来越重要的角色。相对于其他海洋监测手段,海洋浮标检测在自动化、连续性以及长期等方面具有良好特征表现,目前已经成为实现综合性海洋监测的不可或缺的手段之一。就其发展而言,目前我国自主研发了多种浮标观测系统可以对指定海域进行长时间的定点观测,相关技术日趋成熟,已经得到广泛应用。
当前通信领域相关技术蓬勃发展,线数传电台以及各类移动通信大量投入应用的同时,也在开始朝向卫星通信系统缓慢过渡。这种通信技术的变迁,让通信距离不断延伸,从数十公里朝向更远的地方进发,并且通信成本也在逐步得到控制。与之对应地,对海洋浮标的要求也越来越高,因为通信的发展,允许将浮标放置于更远的地方,这样自然能够实现更大范围的监控,但是也从客观上对海洋浮标提出了更高的要求。就目前的技术发展而言,海洋浮标监控应当能够对周围事件以及相关数据信息进行获取并且传输,这些数据中包括离散的参数以及连续的视频流媒体,便于实现时候取证调查支持[1-2]。这些浮标的作用,不仅仅在于第一时间发现海洋环境的变迁,更加是对海上事故现场进行精确定位,甚至于保护国家领海安全的重要基础。在这样的背景之下,入侵目标探测,对于海洋浮标传感器而言,就成为了不可或缺的重要职能之一。以下分别就入侵目标探测实现的两个关键,来对海洋浮标传感器展开深入分析。
1 红外传感器工作特征分析
红外传感器的作用主要是生物体,或者说,主要聚焦在人体检测领域。常规的情况下,人体会辐射出稳定的10μm波长红外线,因此在海洋浮标上增加热释电红外传感器,能够对其监视范围内是否存在人体进行有效探知。当热释电红外传感器检测范围内出现红外辐射源的时候,热释电效应会导致传感器内部形成流动电荷,并且以电信号的形式输出。输出的信号经由滤波以及放大,就可以形成能够被检测和感知的信号。通常而言,热释电红外传感器能够有效探测0.2μm-20μm范围内的波长,如果想要对入侵该检测范围内的人体进行感知,则可以在设备的感光元件前面加对应的波长滤光片,将其他波长的红外波滤除。此种操作能够有效识别入侵其检测范围的人体,并且可以适当增加检测范围,滤除不良数据。实际应用中,红外传感器不需要另外的发射源即可投入工作,且具有灵敏度高、控制范围大、隐蔽性高、安装简便等特点,已经得到广泛应用[3]。
目前在我国的海洋浮标领域,常用的是LHI778热释电红外传感器,这是一种可以面向变化环境实现良好工作的传感器。从内部结构的角度看,其包含了一个双元的释热陶瓷元件和FET相连,并且呈现出高敏感度特征,且能够对温度变化保持透明和低噪声。通常将该型号的传感器与集成电路BISS0001保持联系,共同工作。对于BISS0001而言,其内部独立的放大器能够面向多个型号的传感器实现对接,并且包含了双向鉴幅器,可以有效控制干扰所带来的影响。其电路结构参见图1。
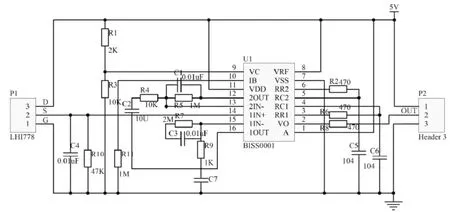
图1 红外传感器工作电路Fig.1 Infrared sensor operating circuit
由红外传感器输出的信号经过无源RC滤波之后,输入到BISS0001第一季放大其中,并且经由二级放大器以及双向鉴幅器之后,将信号输出。实际工作中,红外传感器大多只能覆盖有限的面积,因此还需要在增加菲涅耳透镜的基础之上,合理安排传感器阵列,才能获取良好效果。
2 磁传感器工作特征分析
用于实现入侵检测的海洋浮标传感器,除了需要面向人体实现检测以外,更重要的是要能够实现船体检测。对于船体的检测,目前主要用的方法是磁检测,这是一种针对环境中存在的磁场数进行分析,并且判断铁磁性物体以及其位置的检测方法,主要基于磁异常信号的测量[4]。磁探测本身是一种非接触的测量方式,并且针对性和成功率等方面都保持良好,因此在矿山、车辆以及轮船等探测领域都有着广泛的应用。
从工作原理的角度看,铁磁性物体会在地磁场内感应出属于其自身的新的磁场,从而扰乱其周围的磁场分布,即磁异常现象。磁传感器的工作,正是捕捉这种磁异常信号,并且对其进行解读,从而确定出检测范围内的铁磁物体,并且对其进行定位[5]。
磁传感器种类繁多,性能也呈现出一定差异,但是都具有体积小功耗低的突出特征[6-7]。目前比较常见的小型磁传感器,包括AMR、GMI、微磁通门、原子磁力仪以及GMR几种。其中AMR的应用状况最为成熟,这一个类别的产品也相对更多,但是因为其磁阻变化率基本被限定在5%以内,因此磁阻磁传感器的磁场探测能力也很难得到提升,形成了应用界限壁垒,其分辨率通常保持在几十nT水平上。GMI传感器的问题在于其核心组件的制造难度较大,但是从提及以及分辨率方面看,比AMR表现都要更胜一筹,其最大分辨率能够达到15nT[8]。微磁通门大幅减小了磁通门磁芯,但是磁场探测灵敏度和磁噪声的表现却有所不足,因此在海洋浮标探测领域的应用并不多,虽然其与AMR以及GMI一样都属于成熟技术,但是其探测能力比较有限,最大分辨率致能大道500pT水平。而GMR传感器和原子磁力仪,从技术层面看都略有不成熟的地方,仍然有待于进一步的发展。其中GMR传感器相对而言更具优势,在功耗、提及以及可靠性方面都明显优于既有产品,但是其固有的1/f噪声却成为影响探测能力的重要因素[9],因此目前的研究仍然停留在这一个方面。而原子磁力仪虽然在磁场探测能力方面表现不俗,但是其无法有效测量磁场方向以及磁场分量,并且在结构设计以及信号检测等方面都不太成熟。
一个典型的磁传感器与微电路连接参见图2。
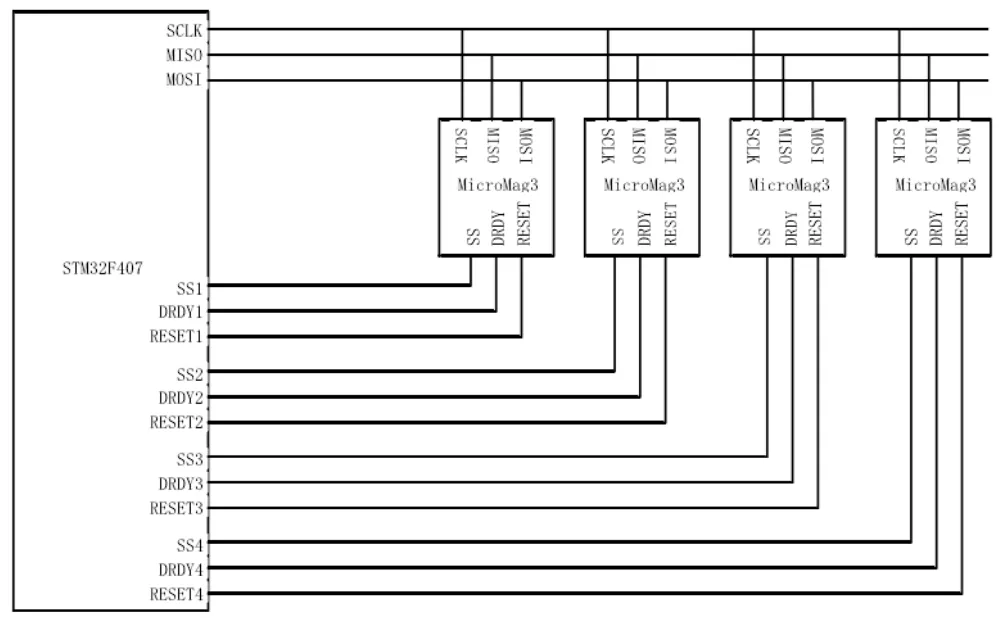
图2 磁传感器微电路连接图Fig.2 Magnetic sensor micro-circuit connection diagram
在图2这个例子中,选用了美国PNI的MicroMag3系列磁传感器,这个系列中的GMI三轴磁传感器的分辨率为15nT,测量范围为±1100μT,具有尺寸小安装灵活的特征。该传感器自带一个SPI接口,可以直接连接单片机。
3 结论
海洋探测的兴起,推动着海洋浮标系统的价值日渐突出,其不仅仅成为自动监测海洋的有力武器,对于保证航海安全以及领海安全,同样意义重大[10]。未来该领域的发展,会朝向更为精确的探测跟踪,以及图像识别的方向迈进,并且在通信技术不断成熟的基础之上有更大作为。
猜你喜欢
家教世界(2023年4期)2023-03-04
垂钓(2022年3期)2022-05-14
当代陕西(2022年6期)2022-04-19
娃娃乐园·综合智能(2021年12期)2022-01-18
舰船电子工程(2021年5期)2021-06-04
垂钓(2019年2期)2019-09-10
数学物理学报(2019年3期)2019-07-23
家庭影院技术(2018年9期)2018-11-02
自动化学报(2017年5期)2017-05-14
成都信息工程大学学报(2017年6期)2017-03-16
