基于鱼群逃逸仿生学的智能车队安全行驶模型研究
2018-11-05 03:54朱畏畏江浩斌马世典曹福贵
机械制造与自动化 2018年5期
朱畏畏,江浩斌,马世典,b ,曹福贵
(江苏大学 a. 汽车与交通工程学院; b. 汽车工程研究院, 江苏 镇江 212013)
0 引言
随着我国汽车工业的飞速发展,汽车保有量迅猛增加,随之而来的交通事故频发、道路拥挤等问题正受到了社会各界的关注。传统环境下,当车队行驶受到干扰时,车队中所有驾驶员的反应时间、制动器延迟时间等具有叠加性,这就直接导致了跟随车与前车的车距逐渐扩大,不断向后发散,很容易引发交通拥堵和碰撞事故。为解决这些问题,一方面在智能交通系统(intelligent traffic system,ITS)发展的背景下,基于无线通信的多车协作式安全的应用[1]以车队为控制目标,通过车辆之间的信息共享,实现多车之间的协作行驶,从而提高道路的利用率,缓解交通拥堵;另一方面,谷歌、宝马、特斯拉等厂商不断加快对无人驾驶汽车的研究[2]。无人驾驶技术能够大大减少由于人的生理因素引起的交通事故,例如疲劳驾驶、操作不当等。
目前车队安全行驶的控制研究主要从现代控制理论和生物仿生的数学建模两个方面出发。例如,文献[3] 中提出考虑车辆控制延迟下的车队纵向控制算法,并通过黄金分割搜索方法确定车队稳定行驶条件。文献[4] 中提出以安全车距作为直接反馈控制项的车队协同跟驰模型,头车速度呈现周期、非周期性变化时,后车都能够实现稳定的跟随。文献[5] 中从生物仿生学角度提出多车协同运动的方法,具体采用邻域平均法和改进的人工势场函数构造鱼群群体移动数学模型,建立基于群体行为的车辆群体行驶、避障、队形变换控制方法。上述文献在一定程度上能够很好地实现车队在单车道环境下的安全稳定行驶,但经过分析发现:仅考虑车队纵向避撞的算法并不能保证车队的安全行驶。当车队前方出现静止障碍物时,就需要对车队车辆横向进行控制。
为了进一步提高车队行驶安全性和行驶效率,本文以智能车队为研究对象,将同一车道内同向行驶的智能车辆看作一个群体,各车辆通过通信设备共享运动状态,目标车辆根据周围车辆的行驶状态进行纵向控制和横向控制,利用鱼群逃避捕食者的仿生学原理,建立车辆的行为规则;基于鱼群逃逸行为的运动学方程,建立二维车队协同避撞模型,计算出各个车辆的期望加速度和航向角,从而保证车队在受到内部和外部干扰时的横向与纵向的行驶安全性。
1 鱼群效应理论
1.1 鱼的生物结构模型
个体鱼可以看作为一种单智能体,能够独立感知环境,对刺激信息作出相应的反应活动,并通过运动系统执行这些活动。个体鱼结构[6]由3个子系统组成,包括:1) 感知系统:单个鱼依靠眼睛等感官获取周围动态环境的信息,传送至鱼的大脑,并过滤掉多余的感知信息;2) 运动系统:该系统主要由鱼的动力学模型、运动控制器等组成,是单个鱼的行为执行单元;3) 行为系统:该系统是单个鱼的“运动意图产生器”,处理由感知部分收集到的环境信息,从行为库中选择行为,并产生相应的运动控制参数,由运动系统执行。
广义牛顿运动方程决定了个体鱼的运动模型[7]为一组耦合的二阶常微分方程:
(1)

1.2 个体鱼的行为规则
鱼群中个体鱼的行为是简单的,包括加速、减速、变向3种行为。当这些简单的个体行为通过鱼群来表现时,就形成了鱼群效应。在鱼群效应中,鱼群具有觅食、聚群、追尾、随机、逃逸等基本高级自组织行为。与个体鱼相比,鱼群能够更有效、更安全地移动和觅食,例如,通过鱼群的群体觅食行为能够更快地寻找到食物浓度最高的位置。
个体鱼具有环境感知、行为选择、行为执行3种基本功能,能够根据此刻自身状态和感知区域内其他鱼的运动状态,选择下一时刻的行为并执行。
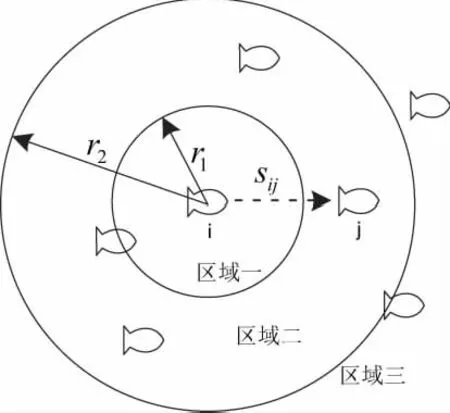
图1 Aoki模型单个鱼的行为规则
个体鱼在行为选择过程中,是通过周围个体鱼的距离来确定自身的行动规则。如图1所示,日本学者Aoki分析了单个鱼的运动机理[8],并制定出3种基本行动规则:避让、并行、接近,这称之为Aoki模型。
在Aoki模型中,鱼i的感知区域由2个同心圆构成,根据相邻的鱼j所在的区域,决定鱼i的行动模式。t+1时刻鱼i的运动方向θi(t+1)由t时刻的运动方向θi(t)和t时刻调整的方向Δθ(t)决定,即:
θi(t+1)=θi(t)+Δθ(t)
(2)
当鱼j在区域一范围内时,即0≤sij≤r1,那么鱼i采取避让行为,将鱼i的态势角调整为与鱼j较远的方向且为90°朝向,即:
(3)
当鱼j在区域二范围内时,即r1≤sij≤r2,那么鱼i采取并行行为,将鱼i的态势角调整为与鱼j的态势角整合,即:
(4)
当鱼j在区域三范围内时,即sij≥r2,那么鱼i采取接近行为,将鱼i的态势角调至为鱼j存在的方向,即:
(5)
1.3 鱼群的逃逸行为
鱼群可以看作为一种群智能体,鱼群效应理论本质上属于群智能理论。鱼群逃逸行为[9-11]是指在海洋中,鱼具有感知环境信息、识别危险信息、选择行为模式等能力,通过个体之间的协作运动,整齐有序地躲避海豹、鲨鱼等捕食者的袭击的群体性行为。智能车队作为一种智能群体,它的安全行驶问题与鱼群的协作运动躲避捕食者有着非常相似的特征,包括:
1) 车辆和鱼都可以看作为智能体,具有感知环境信息、有效的行为评价与选择、行为执行等基本功能。
2) 车辆和鱼的行为结构相似,属于“刺激-反应”结构,当两者接收到动态环境的刺激信息时,都能够作出相应的应激活动。
3) 车辆和鱼能够与其他智能体进行交互,并协同工作。
当车队中的某辆车采取不规范操作时,如突然减速,可以将该车视为对车队袭击的“捕食者”。文献[12]中对鱼群的高级自组织行为进行了模型构建,鱼群逃逸行为的运动学模型原理为:鱼群在遇到天敌时的逃逸,通过个体逃逸及过程中相互作用表现群体逃逸行为。当某个个体鱼发现捕食者时将发送消息给其他的个体鱼。假设个体鱼i接收到危险信号,将分析捕食者的位置、方向,作出相应的逃逸选择。

(6)
同时定义人工鱼逃逸期间避免碰撞的斥力为:
fij=Aiexp[(rij-dij)/Bi]nij
(7)

2 基于鱼群逃逸行为的车队行驶模型
2.1 车队运动学模型
假设车队是由n辆在高速公路上沿相同方向行驶的智能车辆组成,图2所示为智能车队的结构。
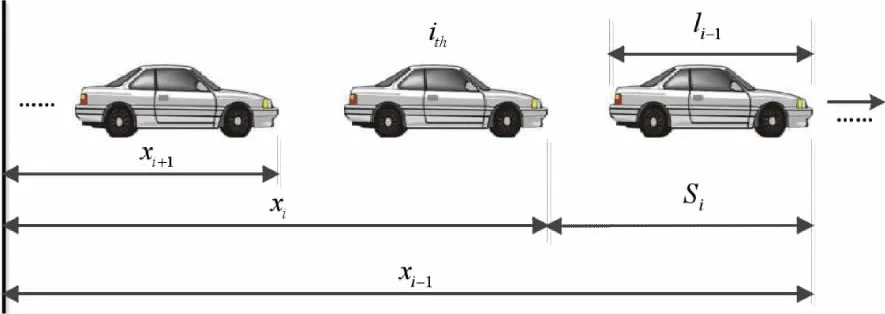
图2 智能车队行驶结构
(8)
其中:xi(i=1,2,…,n)是第i车辆的参考位置;Ldes是期望的车间距离;δi是期望车间距离与实际距离误差。
2.2 个体车辆行为规则的建立
通过对交通流理论的分析[13-14],提出了车辆底层行为规则,即车辆通过对自身和相邻前车的信息感知而采取加速、减速、变道动作。与个体鱼一样,假设当赋予车辆一些基本的、简单的底层行为后,集群后形成的车流也相应的具有一种群体效应。这些效应能够帮助车流整齐有序的行驶,并能够有效地规避危险。
根据车辆的行驶特点与道路环境的约束,设定个体车辆的底层行为包括跟驰行为[14-16]与换道行为[17]两种,图3为个体车辆的行为规则。
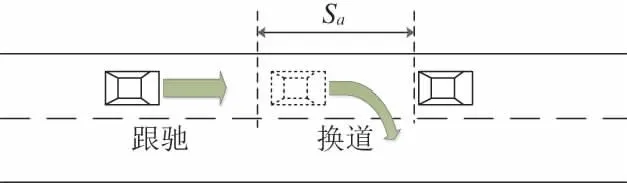
图3 个体车辆行为规则
1) 跟驰行为是车辆最基本的微观行为之一,描述了跟随车辆与前车的纵向运动关系,具体是指在前后两车保持在固定车道内运动,并保持相对安全和稳定的车距。其中,利用人工势场理论去解决车辆跟驰的控制问题是常见的一种方法,通过设计势场函数[18]来表现车辆之间的约束关系:当两车车距过大时,前后车辆会相互吸引,缩短车辆的车距;当两车车距过小时,车辆会相互排斥,扩大车距。
2) 换道行为也是车辆常见的交通行为之一,描述了跟随车辆与车队的纵向运动关系,具体指当两车之间的车距不能保证安全行驶时,通过变更车道来保证行车安全性。换道过程中车辆的运动轨迹是由路径和速度组成的,由于此过程的时间比较短,且在车辆换道的过程中不会出现比较激烈的加减速状态,因此本文合理的假设换道过程中车辆的速率变化很微小,这样换道行为基本是由行驶的路径来决定。
个体车辆行为由感知动态环境、邻车运动状态来决定。基于专用短程通信(DSRC)的车车通信技术能够在车辆高速运动的时相互传输本车的运动状态,因此汽车在运动过程中可以获取周围车辆的速度、位置等信息;同时,跟随车辆可以通过毫米波雷达等传感器获取车距、相对车速等信息。个体车辆行为边界条件确定如下:
1) 当Sa小于跟随车与前车的车距时,跟随车辆通过制动器和油门来控制车辆的速度,对前车进行跟随,避免追尾碰撞。
2) 当Sa大于跟随车与前车的车距时,跟随车变换车道脱离车队行驶,以保证车队的安全行驶。
Sa为理论安全距离,具体公式为:
(9)
(10)
其中:TTCi为第i辆车的距离碰撞时间,vi为车队中第i辆车的速度,vi-1为车队中第i-1辆车的速度,L为最小停车安全距离,通常取值为5m。
2.3 车队行驶模型建立
车队是指在两辆及以上的车辆保持在同一车道行驶,各车辆之间保持稳定的车距和相同的速度,且车队中的车辆可以离开车队、加入车队,而不影响车队的安全行驶。
由式(6)可知,鱼群协同避撞的数学模型是由广义牛顿运动方程演化而来,本质上属于二阶常微分方程。根据鱼群避撞的运动学机理,车队中个体车辆横向与纵向加速度控制是由前后车的速度差、车距与安全距离之差决定的。根据人工势场理论,本文假设在车队协同避撞过程中,跟随车辆的加速度由前后两车的速度差引起的力、实际车距与安全车距之差引起的力决定。
1) 当两车之间的车距大于理论安全距离Sa时,需要对跟随车的纵向进行控制,即可满足车辆的安全行驶,具体描述为:
(11)
其中,mi为车队的第i辆车的质量;xi-1(t)、xi(t)分别表示t时刻车辆i-1、i的位置;vi-1(t)、vi(t)分别表示t时刻车辆i-1、i的速度;f[Δvi(t)]为车辆i在t时刻遇到碰撞危险时与前车的速度差所产生的作用力;δi是安全距离与实际距离误差;f[δi(t)]为车辆i在t时刻遇到碰撞危险时车距与安全距离之差所产生的作用力,其中:
f[Δvi(t)]=k1[vi(t)-vi-1(t)]
(12)
(13)
其中,k1、k2分别是速度差、车距和安全距离差引起排斥力的权重系数。此行为第i辆车与第i-1辆车保持相同的航向角,即:
θi(t)=θi-1(t)
(14)
2) 当两车之间的车距小于理论安全距离时,需要通过方向盘来改变车辆的车道位置,脱离车队行驶,此时由速度差引起的排斥力可以忽略,具体描述为:

(15)
脱离车队运动本质是一个换道过程[11],其中,余弦换道轨迹计算较为简便,还具有较好的平滑特性,是目前众多换道模型轨迹中被广泛采用的轨迹之一 。在此过程中,跟随车辆i的运动航向角定义为:
(16)
3 仿真验证
PreScan是用于主动安全研究的软件,是一种基于雷达、摄像头和全球定位系统等传感器技术并用于发展先进驾驶辅助系统(ADAS)的仿真平台,相对于Carsim等软件,Prescan具有以下几种特点:1) 拥有高精度的传感器、无线通信设备等。雷达包括普通雷达、激光雷达、超声波雷达;摄像头包括普通摄像头、鱼眼摄像头;无线传输设备包括DSRC、Antenna、OBU、Beacon;2) 精确的动力学模型;3) 可以模拟不同的天气环境;4) 可以模拟分析不同安全系统和路况下的驾驶行为。
本文运用PreScan与MATLAB进行联合仿真,针对车队前方出现固定障碍物和头车进行紧急制动,分析车队中其他车辆的跟随特性以及车队的安全性。仿真中,设定车队中有6辆车,每辆车的初始状态为匀速稳定行驶,车间通信延迟为0.5 s。
3.1 头车速度周期变化
设定t=0~5s时车队以25m/s匀速行驶;在t=5~10s头车以减速度-3m/s2进行紧急制动,在t=10~15s头车加速运动,头车按此周期性速度变化规律行驶。图4为车队的跟随车辆的速度变化情况,图5为车队中各车间距的变化情况。
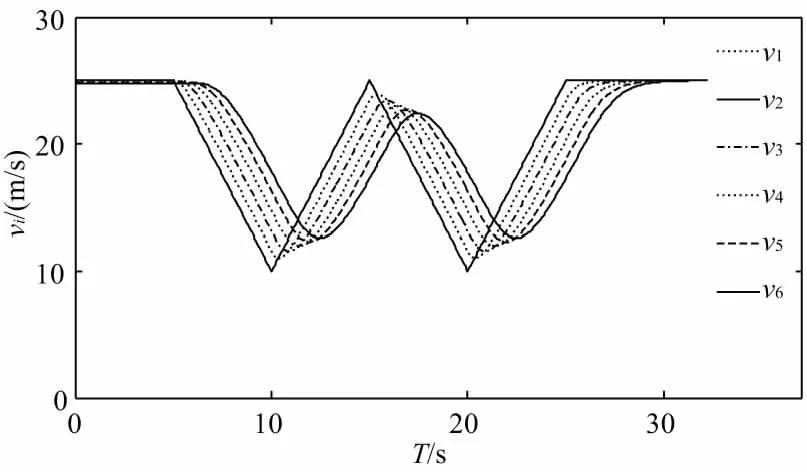
图4 头车与跟随车辆的速度变化情况
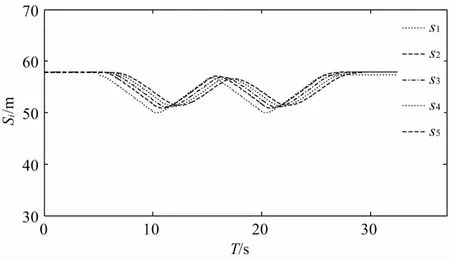
图5 跟随车辆间距变化情况
由图4和图5可以看出,当车队运动受到内部干扰时,即头车速度呈匀加速与减速周期变化时,跟随车辆均能够保持良好的跟随特性,跟随车距相对稳定,未发生扩散现象。
3.2 前方固定障碍物
车队以速度25m/s匀速行驶,两侧相邻车道上分别有一个固定障碍物。图6和图7分别是车队在固定障碍物干扰下的车队速度和行驶轨迹变化情况。
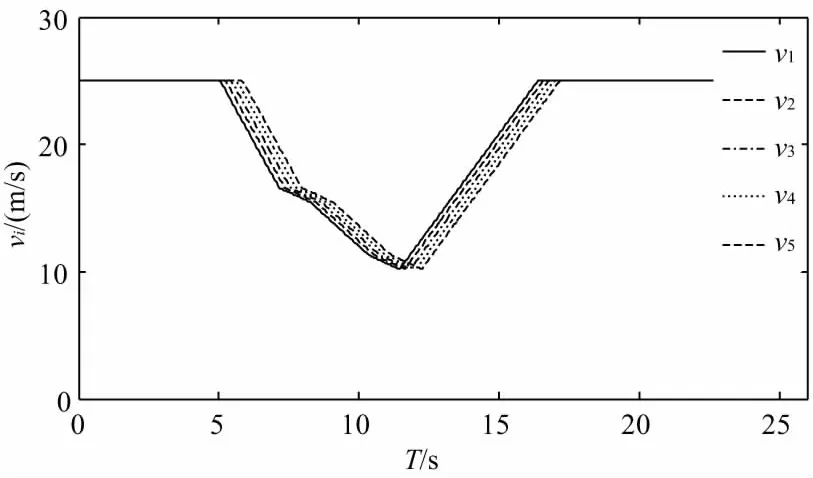
图6 前方障碍物时车队速度变化情况
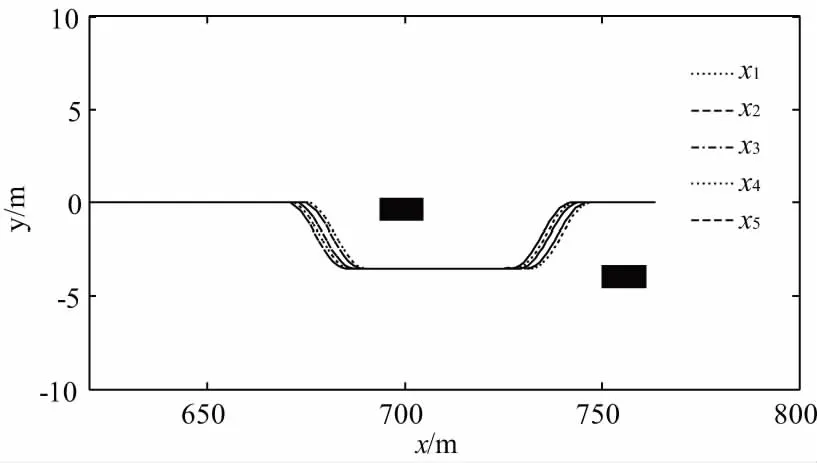
图7 前方障碍物时车队行驶轨迹变化情况
由图6和图7可以看出,当车队受到外部干扰(即前方出现障碍物)时,车队能够提前作出响应并降低车速。当安全车距大于实际车距时,车辆能够自主换道,按照规划的平滑路线行驶,合理地避开前方障碍物,保证车队的行车安全性。
4 结语
针对目前车队安全行驶模型存在的问题,本文在建立车队纵向控制的基础上引入了车辆运动航向角,建立车队二维行驶模型。从鱼群逃逸仿生学角度,对鱼的自组织行为进行了研究分析,并将其应用到车队的协同行驶研究中,描述了车辆的行为特性,构建出车辆的运动规则,并确定各区域内车辆的纵向与横向的控制方法。仿真结果显示,车队在受到内部干扰时,跟随车辆之间能够保持稳定的车距,体现了良好的跟随特性;当受到外界干扰(道路障碍物)时,车队能够有效避开障碍物,避免发生碰撞,实现了车队稳定行驶和协同避障的目的,弥补了一维环境下的车队协同避撞模型的不足,提高了车队运行安全性和行驶效率,一定程度上能够缓解交通拥堵问题。
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
电子制作(2019年23期)2019-02-23
莫愁·时代人物(2018年7期)2018-09-12
莫愁(2018年20期)2018-07-19
中外文摘(2017年19期)2017-10-10
中国篆刻·书画教育(2017年5期)2017-06-08
湖南大学学报·自然科学版(2014年3期)2014-12-30