基于交叠视场亮度优选算法的导航星库构建方法
2018-11-03 03:50:02叶宋杭孙朔冬叶志龙李金晶
上海航天 2018年5期
叶宋杭,孙朔冬,叶志龙,李金晶
(1. 上海市空间智能控制技术重点实验室,上海 201109; 2. 上海航天控制技术研究所,上海 201109)
0 引言
星光导航在卫星导航、深空探测等空间领域应用广泛。导航星库是星光导航不可缺少的组成部分,是天文导航系统实现导航功能的关键,是影响星敏感器星图识别效率和姿态解算精度的重要因素[1]。导航星库通过基础星表在地面制作完成,包含了一定规模的恒星信息。在实际应用中,基础星表中所有的恒星不适合都选为导航星。
导航星库构建方法[2]一般需要优选导航星,以实现导航星均匀分布,降低导航星库的冗余度。主要构建方法有星等阈值过滤[6]、自组织导航星选择[7]、星等加权[8]、回归选取[6]等。星等阈值过滤方法是直接设定星等阈值,提取基础星库中的星等小于该阈值的恒星构成导航星库。该方法简单方便,与探测星匹配性好,但恒星不均匀分布会产生一些不良影响。若某个天区恒星数量太多,则会降低星图识别的准确率,增加星图识别时间,导致星敏感器的性能受到影响;若恒星数量太少会造成空洞,导致星图识别失败,星敏感器无法测定姿态。自组织导航星选择方法通过多级缩减导航星数量,能得到导航星数量少且分布均匀的导航星库,但在实际应用中,由于该方法复杂度很高,一般只能做到二级缩减。恒星星等越低,被星敏感器捕获到的概率越高。星等加权方法基于该原理,根据恒星的星等赋予每颗恒星不同权值,对低星等的恒星赋予较大权值,对高星等的恒星赋予较小权值,当选择恒星作为导航星时,低星等被选择的概率大于高星等的概率。该方法类似于视星等阈值过滤方法,但仍没有解决与星等阈值过滤方法相同的问题。回归选取方法构建了新的动态星等阈值过滤选择模式,用动态星等阈值代替星等阈值过滤方法中的静态阈值。该方法为了求解高维非线性动态星等阈值分布函数,采用了统计学习理论的支持向量机的方法,所得导航星库中的导航星数量少,分布均匀性好。但由该方法求得的动态阈值与真实阈值之间存在误差,在恒星星数量较少的天区,会导致所选的导航星数量变得更少,因此该方法动态阈值自适应性仍不够完善。
上述方法存在导航星库制作过程复杂、导航星分布不均等问题。为解决这些问题,综合考虑现有导航星库制作方法的优劣势,并满足制作导航星库的通用要求,本文提出一种基于交叠视场亮度优选算法的星敏感器导航星库构建方法。
1 星库预处理
星表记录了全天球中恒星的详细天文参数,包括位置、星等、光谱特性、变星标识、伴星标识等。常用的星表及其基本特性见表1。表中Hipparcos星表较容易获得,且精度很高,为0.000 8″,因此本文选择该星表为基础星表。由于基础星表中星等过大的恒星很难被星敏感器探测到,本文取基础星表中星等小于等于7.0的恒星构成基础星库,包含15 537颗恒星,在全天球中的三维分布如图1(a)所示。由图可知,基础星库中的恒星在全天球中的分布过于密集,不适合直接用于制作导航星库,而需要进行预处理。
基础星库的预处理流程如图2所示,具体处理思路如下:
1) 考虑到星敏感器的光谱特性、仪器星等与视星等存在差异,观测星不可能与导航星库中的导航星完全对应,本文采用星等阈值过滤方法来筛选导航星。为尽可能使观测星都包含在导航星库中,令星等阈值Mth略大于星敏感器灵敏度,删除基础星库中所有星等大于Mth的恒星。
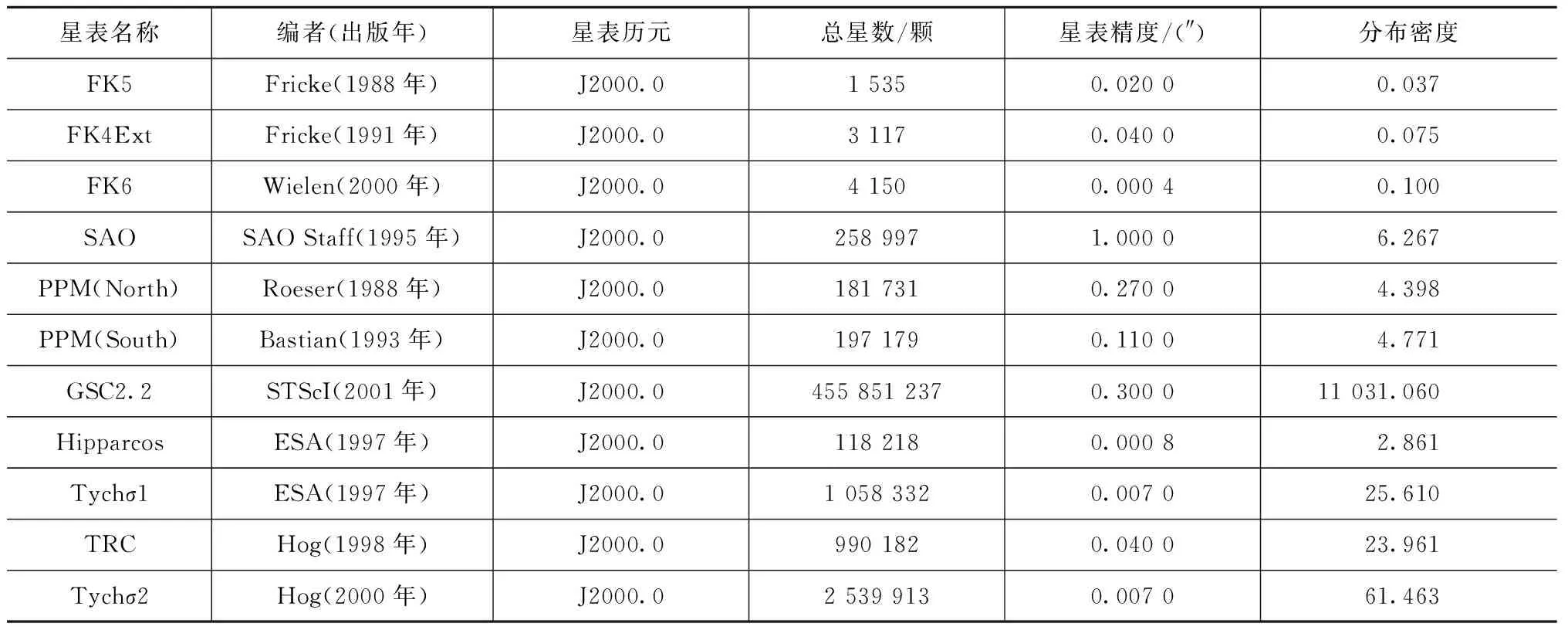
表1 常用星表系统基本特性

图1 基础星库和备选星库三维图Fig.1 Three-dimensional diagrams of basic and alternative star databases
2) 为提高恒星质心位置计算的精度[10],目前处理“双星”的方法有两种:一是删除“双星”,合并成单星[9];二是直接删除“双星”[6]。本文采用第二种方法,删除星库中所有恒星之间角距小于θth的“双星”。
3) 考虑到周年光行差[12]较大的恒星留在星库中,将影响星图识别的准确性。根据星敏感器的精度,设定恒星周年光行差阈值dg,删除周年光行差大于dg的恒星。
4) 现有方法都是无条件剔除变星,但由于变星分等级,删除所有等级的变星会丢失大量信息。因此,将星等变化大于0.6的不稳定星,以及星等大于(Mth-0.6)的次稳定星(星等变化=0.06~0.60)全部删去,以避免这部分变星的星等变化超出星敏感器的敏感极限。
5) 星敏感器的存储空间有限,为减小存储空间,缩短星图识别时间,本文将星库中星等大于星敏感器敏感极限的恒星删除,得到含有5 046颗星的备选星库。备选星库在全天球中的三维分布如图1(b)所示。由图可知,备选星库的密度相比基础星库大幅减小,但恒星分布不均匀,因此将利用交叠视场亮度优选算法进一步筛选备选星库。
2 基于交叠视场优选亮度算法
合理的导航星库不仅能有效提高星图识别成功率和匹配速率,而且可提高星敏感器的姿态精度,对星图识别必不可少。根据星敏感器的工作原理,其仿真评价使用的姿态精度公式[12]为
(1)
式中:σcross-boresight为探测器平面与视轴正交轴的测量精度;σroll为绕视轴滚动的精度;F为星敏感器视场;σcentroid为质心定位精度;Npixel为芯片的像元数目;Nstar为参与姿态解算的星颗数;θsep为参与姿态解算的平均角距。
影响精度指标的因素有很多,其中首要因素为参与姿态解算的星颗数。由某国产星敏感器的分析结果可见:在σcentroid、Npixel、F值固定的情况下,当精度要求优于3″时,参与姿态解算的星颗数为15~20颗;当精度要求优于5″时,星颗数为8~15颗;为不丢失跟踪目标,视场内至少需要5颗星。影响精度指标的次要因素为参与姿态解算的平均角距,其值表示视场中导航星分布的均匀程度。在不改变其他影响精度指标时,可适当增加参与姿态解算的星颗数,以提高视场内导航星分布均匀程度和星敏感器姿态精度。
根据星敏感器的精度要求,确定参与姿态解算的星颗数为Nstar颗。由于实际拍摄的星图中亮度较高的观测星通常不是干扰星,且容易获得更高的质心提取精度,因此在各视场星图识别过程中,优先采用各视场中亮度较高的星点。在保证视场中的探测星数量尽可能接近Nstar颗的同时,确保恒星的星等足够小。为了在最少的识别次数中获取与导航星匹配的观测星组合,需根据亮星优先的原则选取导航星。如在实际应用中,星敏感器将星图中所有Nd颗探测星按照亮度排序,取前Nstar颗亮星参与星图下一步识别过程,删除剩余暗星。因此,在构建导航星库时,生成覆盖全天球的交叠视场,选取每个视场内亮度排名前Nth颗(Nth≥Nstar)的恒星作为导航星。
为增加参与姿态解算的导航星的平均角距θsep,均匀分布每个视场范围内天区的导航星。由于星敏感器实际视场内的天区只占天球很小一部分,因此将视场范围内的天区视作平面区域,如果能实现任意光轴指向的视场内导航星的星像在像面上均匀分布,那么所有导航星在天球上可近似均匀分布[14]。基于上述思想,将像面上的星像密度作为筛选导航星的指标,把导航星在天球上的分布问题转化为星像在像平面上的分布问题。
导航星均匀分布的实现步骤如下:
1) 以星敏感器视场的内切圆为视场,将视场范围内的天区恒星三维坐标转换为像平面上的二维坐标,则基于光轴指向计算转移矩阵为
(2)
恒星映射在探测器像平面上的坐标为
(3)
式中:r、p、q分别为星敏感器光轴指向的赤经、赤纬、旋转角;(v1,v2,v3)为恒星在天球坐标系下的坐标;f为星敏感器的镜头焦距;xpixelsize、ypixelsize分别为探测器像平面沿X、Y轴方向的像元数;Dx、Dy分别为每个像元沿X、Y轴方向的尺寸。
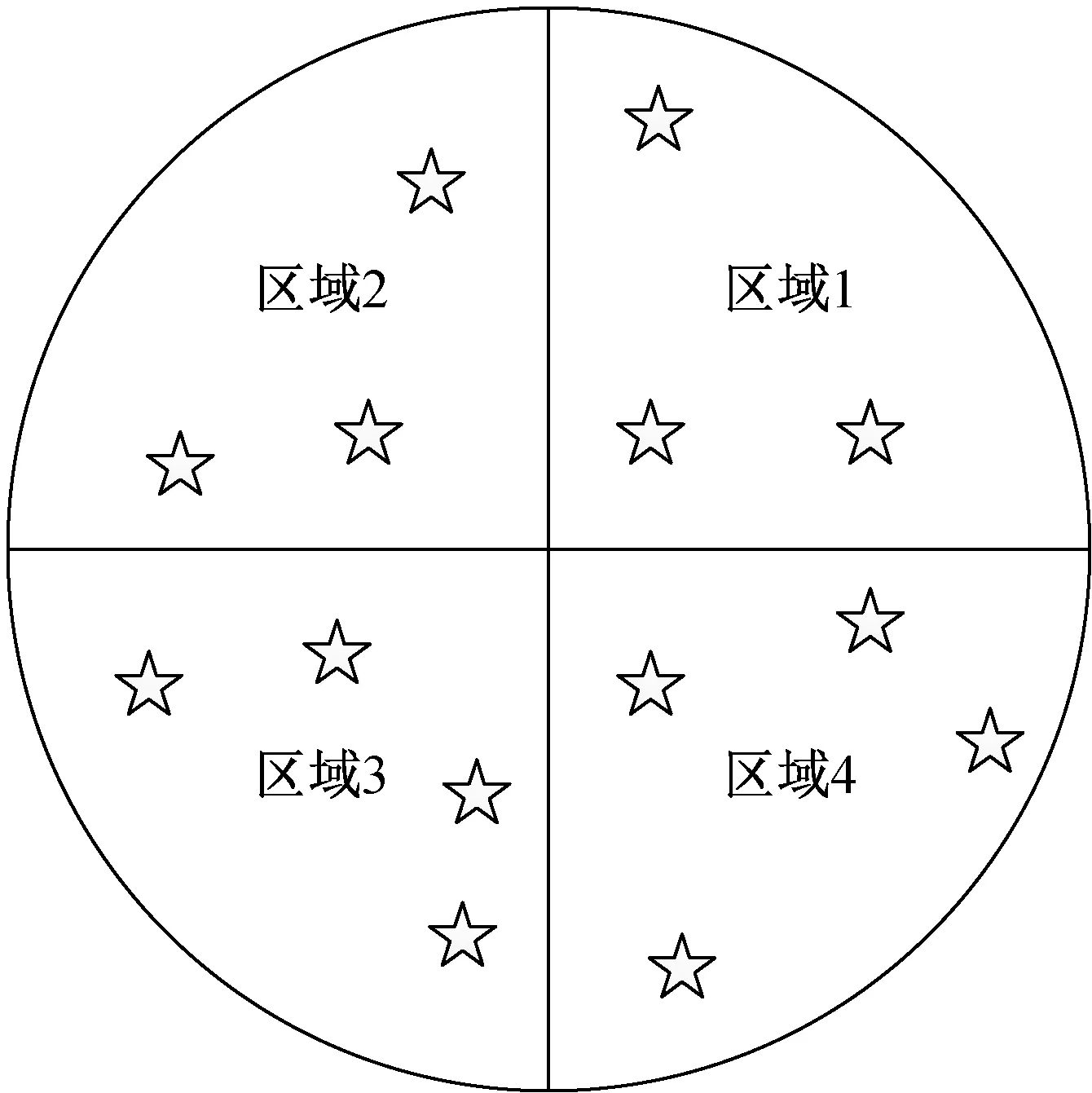
图3 视场内扇形区域划分示意Fig.3 Schematic diagram of fan section partition in FOV
2) 根据恒星在像平面上的坐标(x,y)与像平面上主点(xm,ym)的关系,对恒星在像面上的位置进行区域划分,共分成4个相等的扇形区域(见图3),其表达式为
(4)
3) 根据赤经从1°至360°每隔M°,再根据赤纬从-90°至90°每隔M°进行光轴指向,生成N个交叠视场,分别统计每个像平面和扇形区域内的星颗数。根据精度要求,参与姿态解算有Nstar颗星,确定像平面星颗数的阈值NFOV,计算每个扇形区域的阈值Nq,Nq≥NFOV/4;优先判断像平面的星颗数是否大于NFOV,若不是,则不作处理,若是,则判断该像平面内每个扇形区域的星颗数是否大于Nq,若某区域的星颗数小于Nq,则不处理,否则,按照亮度排序该区域的恒星,优先选取前Nq颗亮星,将剩余暗星作为待删除星;依次统计每个视场,将所得的待删星库从备选星库中删除,得到最终导航星库。
3 仿真试验及结果分析
某国产星敏感器的敏感极限为6.1星等,视场为14.5°×14.5°,先进摄影系统(APS)的尺寸为2 048×2 048像素。星库预处理中,星等阈值Mth=6.5,角距阈值θth=0.212 °,周年光行差阈值dg=0.5″。参与姿态解算的星颗数Nstar为15颗,阈值NFOV=25,Nq=7。
采取交叠视场亮度优先方法构建星库时,视场间隔参数M对星库均匀性和星库规模的影响较大。通过设置不同M值,对比不同规模星库的均匀性,得出最优的M值。由于星敏感器的视场半径为7.25°,因此M小于等于7.25°。不同星库的星颗数分布见表2。表中通过设置不同的视场间隔参数,得到了不同规模的星库,随机生成10 000个光轴指向,并统计每个光轴指向天区视场内的星颗数,按照星颗数所在区间统计在该区间的光轴比例。由表2可见:当视场间隔参数M为3.625时,得到的3 959颗导航星的星库,在10~25颗和15~20颗的光轴个数分别占97.38%、55.82%,相比其他方法制作的星库比例最高,说明该星库的恒星在全天球中分布最为均匀。随机光轴星颗数如图4所示。由表2、图4可知,导航星库在10~25颗的光轴个数仅占75.65%,比备选星库提高了21.73%。

表2 不同星颗数区间的光轴分布概率

图4 随机光轴星颗数直方图Fig.4 Histogram of random optical axis star number

图5 不同视场内的恒星分布Fig.5 Star distribution of different FOVs
根据某国产星敏感器的特性,设置探测器主点坐标为(1 024,1 024),镜头焦距f为44.129 2 mm,像元尺寸Dx、Dy均为0.005 5 mm。不同视场内恒星分布如图5所示。随机生成(124.25°,-46.50°)、(1.25°,84.32°)、(62.82°,14.67°)3个光轴指向,将它们分别指向备选星库和导航星库的天球中,分别将图5(a)和(d)、图5(b)和(e)、图5(c)和(f)进行比对,从中可以明显看出,导航星库视场中的星分布明显比备选星库均匀,且表示每个扇形区域最亮2颗星的红色方框都没有改变位置,说明交叠视场亮度优先方法可保证视场中的亮星不被删除,同时删除其他分布密集的暗星,得到局部天区均匀分布的导航星库。
备选星库、待删星库、导航星库的二维分布如图6所示。由图可知:备选星库的恒星在全天球呈“V”形分布,待删星库中的恒星绝大多数都在“V”形内,而导航星库分布均匀。由此证明,本文方法能使导航星在全天球中均匀分布。

图6 不同星库的二维图Fig.6 Two-dimensional diagrams of different star databases
4 结束语
本文提出了一种基于交叠视场亮度优选算法的星敏感器导航星库构建方法。在星库预处理中,按照恒星自行筛选和有选择地筛选变星。该方法与单一的以星等阈值进行星库预处理的方法相比,可有效删除影响星图识别成功率的恒星。在此基础上,采用交叠视场亮度优选算法,成功筛选出视场中亮度高且分布均匀的恒星,使所选的导航星在全天球和局部天区中分布均匀、冗余度低、亮度高。该导航星库能为后续星敏感器节省在轨存储空间,提高星图识别匹配速率和识别成功率。但在导航星库预处理时,“双星”的删除可能会丢失较多有用的恒星,后续可通过对“双星”等效处理,提高星图识别的成功率。此外,可进一步改进所采用的扇形划分和光轴生成方式,得到分布更均匀的导航星库。
猜你喜欢
数学物理学报(2022年1期)2022-03-16 06:15:00
中国交通信息化(2022年12期)2022-02-11 12:05:14
摄影之友(2020年12期)2020-12-23 09:39:39
收藏界(2019年3期)2019-10-10 03:16:30
现代装饰(2019年7期)2019-07-25 07:42:20
收藏界(2018年4期)2018-10-12 00:57:20
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
应用光学(2014年3期)2014-06-01 03:37:36
应用光学(2014年6期)2014-03-27 02:03:30
测绘科学与工程(2013年2期)2013-03-11 15:07:29