
旋翼无人机大比例尺测图应用及精度分析
2018-11-01 03:30侯树慧李杰牟冬星孙伟达
城市勘测 2018年5期
侯树慧,李杰,牟冬星,孙伟达
(石家庄市勘察测绘设计研究院,河北 石家庄 050019)
1 引 言
无人机航空摄影测量技术以其机动、灵活、高效率、低成本、易操作以及在应急救灾和小范围数据快速获取和成图方面的独特优势成为常规航空摄影测量手段的有效补充[1],带来航空摄影测量应用领域的变革,同时为大比例尺地形图测绘提供了新的技术手段。
多旋翼无人机,操作简单、安全系数高、带有小型云台[2],起降方便灵活,受起飞场地限制影响小,利于获取清晰准确的影像信息[3];倾斜摄影,通过在一个飞行平台上搭载多台传感器(如五镜头、两镜头相机等),同时从垂直、倾斜等不同角度采集影像,从而获取到地面物体更为完整、全面和准确的信息。相对传统摄影测量,无人机倾斜摄影手段获取的成果数据类型更丰富、精度更高,这些特点使其更适用于小区域较高精度的测量任务。
本文紧密结合生产实际,探讨无人机倾斜摄影技术应用于小区域大比例尺地形图测绘的可行性。
2 项目实施
本次试验采用无人机倾斜摄影测量技术获取外业影像数据,以Smart3D Capture作为三维建模软件,在清华山维EPS地理信息工作站平台下采集生成数字线划图,最终通过对线划图精度评定来确定方案的可行性。
为便于数据精度统计分析,选取位于石家庄市勘察测绘设计研究院2017年基础测绘任务范围内的某科技园作为试验区。该区域有最新现势性的全站仪测图成果,面积约 0.15 km2。园区地势平坦,海拔介于 70 m~80 m之间,以多层建筑为主,园区外有少许沟坎,以农田为主,难度类别Ⅱ.0。
为保证结果的普适性,选用市场上常见的A、B、C、D四种不同厂家、不同型号的旋翼无人机为平台搭载高清航拍相机进行低空倾斜摄影测量;采用GNSS-RTK方式进行预设地面靶标像控点测量。为了更好地对比不同型号无人机的测量精度,此次外业飞行均按照 1∶500地形图的要求进行航线设计。航飞前进行了外业实地踏勘、设计,并布测了直径 1 m的纸质地面靶标。
外业飞行选择在5月底,天气晴朗,能见度高,风力较小,确保获取的影像清晰度高,照片色彩均匀,饱和度良好,能够真实地表达地物信息[5]。各型号无人机均飞行1个架次14条航线,飞行时长为 20 min左右。各无人机航摄技术参数如表1所示。
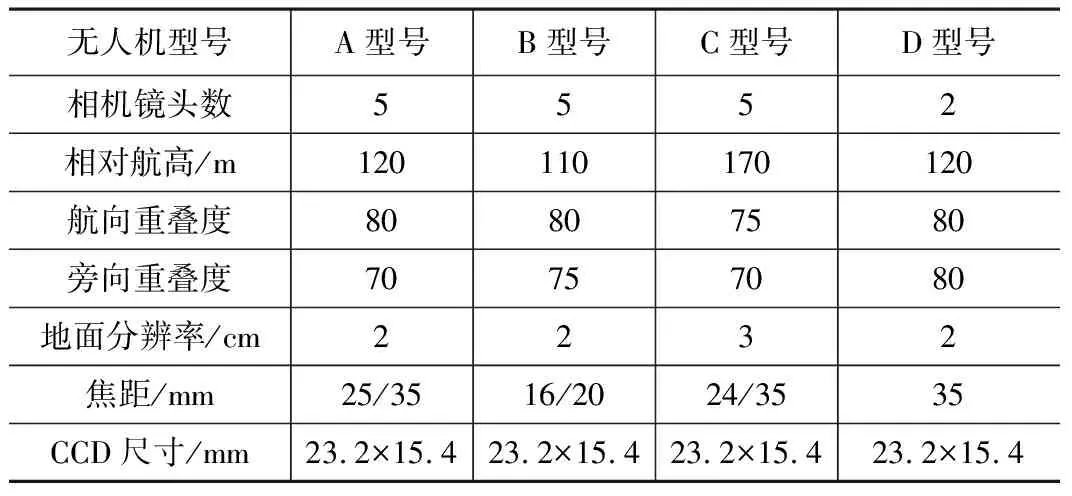
各无人机航摄技术参数 表1
航空摄影完成后,按照航测作业流程进行项目生产:原始数据导入(照片、POS数据及控制点坐标)-数据整理-像控刺点-自动空三解算-点云加密-三维立体模型重建,数据处理完成后将模型导入EPS2012平台中提取出线划图,作为成果精度评定的主要源数据。
3 数据分析与评定
数据分析评定主要涉及两方面,一是分析三维模型成果的表观质量,主要查看其色彩、纹理效果,特别是核查可能出现纹理漏洞的地方;二是评定基于倾斜数据采集的线划图的数学质量,选取图中明显地物、地形特征点作为被检测点,与全站仪采集的实测坐标或高程进行比对。
3.1 表观质量对比
通过模型的色彩、纹理对比发现:各三维模型产品成像清晰,无污点;色彩、纹理表观质量差异不大,只有1个成果纹理效果稍差,主要原因是航飞时接近中午,光照过强。
3.2 空三加密精度情况
本次各型号无人机成果的地面分辨率、重叠度、航飞质量以及控制点选取差别不大,因此,空三加密精度相差无几。
各成果的区域网空三误差在0.114~0.125像素之间,控制点误差在X、Y、Z方向的值均在 5 mm~10 mm,没有明显差距。
3.3 成果精度评定与分析
为确定成果数学精度,采集三维模型中纹理清晰的特征点进行平面精度评定,选取局部高程变化小的点状要素或路面进行高程精度评定。
试验分别选取了具有代表性、分布均匀的57个平面检核点,34个高程检核点进行精度统计分析。具体统计数据如表2、表3所示:

平面精度统计表 表2
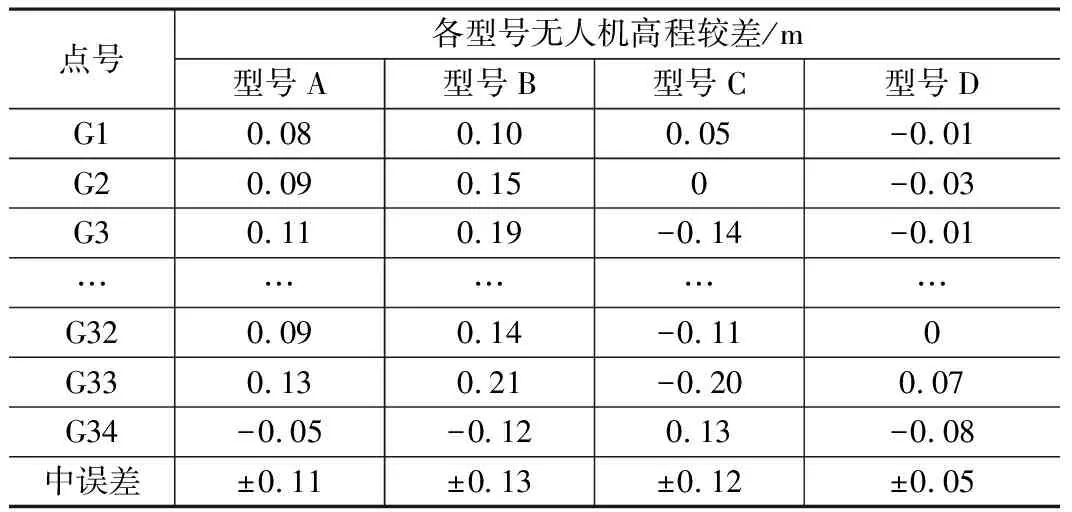
高程精度统计表 表3
从表2可以看出:平面中误差最大的是B型号无人机,平面中误差为 ±0.18 m,均满足规范关于 1∶500地形图平面点位中误差不大于 ±0.25 m的要求;
从表3可以看出:高程中误差最大的是B型号无人机,高程中误差为 ±0.13 m,均满足规范关于 1∶500地形图高程中误差不大于 ±0.15 m的要求。
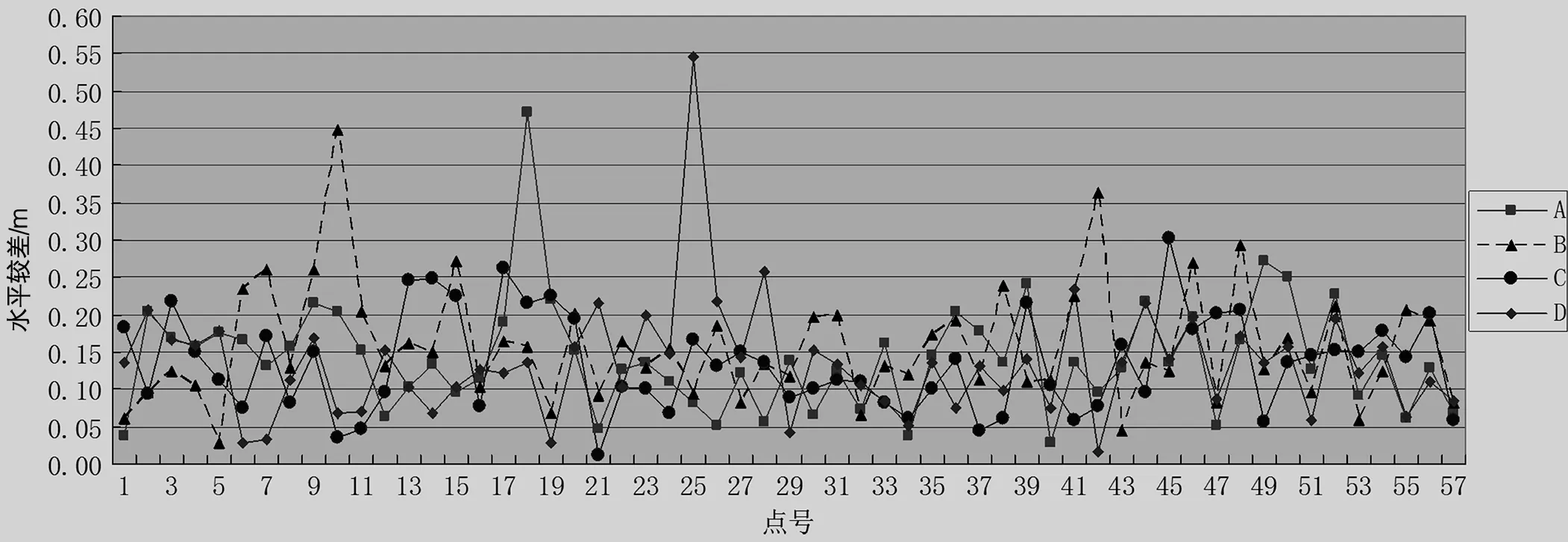
图1平面点位较差对比分析图
从图1可以看出:D型号无人机25号点存在粗差,其他点较差大小分布比较集中,C型号无人机误差分布相对集中,精度最优,A型号18号点误差较大,其他点差别不大,B型号无人机平面误差离散性分布较强。经分析:D型号无人机25号粗差原因是受建筑物阴影影响所致;A型号无人机18号点误差较大主要是内业立体采集量测时的切测误差造成的,多次、多人采集证明,该点点位较差 0.31 m,差值仍稍显大,可能还有其他误差因素掺杂其中。
从图2可以看出:个别机型个别高程点存在粗差,粗差比例不超限;D型号、A型号无人机误差分布较集中,精度较好,B、C两种型号的高程较差起伏变化较大,分布均比较离散,高程中误差也很接近。

图2高程较差对比分析图
无人机航摄测量自带的非量测型相机,像幅小、基高比小,从而影响高程精度;飞行质量(如航行高度、航向及旁向重叠度、航带弯曲度、像片旋偏角等)和影像质量(如清晰度、分辨率、层次、色调等)等也会影响精度。
对各型号参数综合分析,D型号无人机的飞行高度低、镜头焦距长、重叠度高,所以精度优;A型号正摄镜头焦距为 25 mm,与D型号焦距 35 mm相比较小,对航测精度有影响;B型号无人机飞行高度低,但镜头焦距较短,成像精度不太高;C型号无人机为了追求效率,飞行高度较高,但地面分辨率较低,对提高精度不利。
通过以上数据分析表明:4种不同型号的旋翼无人机高程和平面误差均满足城市测量规范 1∶500地形图精度要求,验证了低空旋翼无人机倾斜摄影技术可以用于 1∶500大比例尺地形图测制。为了获得高精度航飞成果,建议综合考虑无人机设备技术参数,像控点布设采用预设靶标可较好保障成果精度。
4 结 语
本文以某园区为试验区,采用不同型号的旋翼无人机以倾斜摄影测量技术生成线划图,通过对成果的数学精度分析评定,验证了无人机航空摄影测量技术用于 1∶500大比例尺地形图的可行性。
本次选择的测区为小范围平坦厂区,对于地形起伏较大区域的 1∶500大比例尺测图精度能否满足要求,还有待进一步的验证和研究。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
当代陕西(2020年23期)2021-01-07
航天工业管理(2020年11期)2021-01-04
航天工业管理(2020年9期)2020-12-28
航天工业管理(2020年4期)2020-06-16
电子制作(2019年9期)2019-05-30
北京航空航天大学学报(2016年8期)2016-11-16
铁道通信信号(2016年8期)2016-06-01
安徽地质(2016年4期)2016-02-27
