
3D SLAM移动测量系统在城市测绘工程项目中精度分析
2018-11-01 03:15:52严立井发明
城市勘测 2018年5期
严立,井发明
(宁波市测绘设计研究院,浙江 宁波 315042)
1 引 言
三维激光数据扫描具有不接触物体、测量精度高、速度快、信息丰富等特点,目前在测量领域应用广泛。基于三维激光扫描仪的数据采集方式包括静态激光扫描、移动车载扫描、推车扫描、机载激光扫描等,静态扫描需要大量搬站,扫描效率低,容易造成地物遗漏,不适合城市测量中较大范围的扫描;推车扫描适用于路面较平整的室内外,无法在复杂的城市测量环境中应用;移动车载扫描适用在道路开阔平整的街道等,且无法进行室内扫描;机载激光扫描需要无人机作为载体,且只能扫描顶部和部分侧面数据,其也无法满足城市测量应用要求。
3D SLAM移动测量系统在传统移动式三维激光测量基础上,进一步改善数据采集方式,采用背包式激光扫描,提高数据采集的便携性和适用性。目前基于3D SLAM的移动测量系统主要分为集成GPS和非集成GPS。后者采集的数据无法直接获取绝对坐标系坐标,需布设大量同名控制点进行纠正,而3D SLAM和GPS结合的移动测量系统可实时获取WGS84坐标系下三维激光点云数据。本文在城市测绘具体项目中(室内测量、道路竣工、小区竣工、普通建筑竣工),引入该系统数据测量方式,将采集的三维点云数据与传统方式采集的数据进行精度验证分析,证明基于3D SLAM移动测量系统在城市测绘中的适用性。
2 3D SALM移动测量系统
本文中所采用的移动测量系统是一款徕卡公司基于3D SALM研发的背包式测量系统(Pegasus Backpack),可实现室内外一体化三维激光扫描测量,适应于移动测量、地图制图三维建模等领域。系统主要包括2个激光扫描仪、GPS接收机、5个全景相机、IMU、平板控制平台、电池和框架。移动实景测量系统克服复杂环境对普通移动测量的限制,可应用于楼梯、矿场、码头和隧道等场景。在人行走过程中,即可实时获取点云和全景数据,无须架站搬站,且在控制平台实时显示当前采集点云范围。该系统具有如下特点:①高精度GNSS和IMU惯性导航定位;②室内外一体化测量;③同步获取真彩色点云和照片;④操作简单、使用灵活。
3D SLAM(Simultaneous Localization And Mapping)是一种在人工智能领域广泛应用的技术,主要解决物体在移动过程中根据位置估计和特征点迭代匹配,实时进行自主定位并构建增量式地图问题。在测绘领域中,移动测量系统目标是利用SLAM技术在误差最小化约束条件下获取观测点云数据,解决GPS信号弱情况下无法定位问题。3D SLAM移动测量系统的关键步骤主要包括:
(1)基于IMU和GPS初始数据,利用SLAM数据进行连续特征点匹配;
(2)将匹配好的SLAM数据,通过多帧匹配和闭环检测,反过来精算POS数据;
(3)将精算后的POS数据,进行整体连续匹配;
(4)解算精密点云数据。
3 数据采集与验证
3.1 数据采集
移动测量系统采集流程主要包括GPS接收机架设,系统初始化,数据采集,数据处理等,如图1所示。在已知控制点上架设静态GPS接收机主要是为了数据后差分处理;系统初始化主要包括惯导启动;数据处理包括坐标转化、差分计算、点云抽稀等。
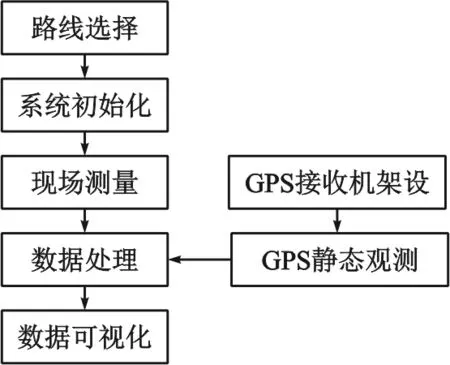
图1 移动测量系统数据采集流程
3.2 精度检验方法
精度检验主要包括相对精度检验和绝对精度检验。相对精度检验主要是在不同坐标系下,量取传统方式获取成果中的特征点和特征线,然后量测对应点云数据的特征线值,比较两个特征线误差;绝对精度是在同一坐标系下,比较相同位置特征点的坐标误差。
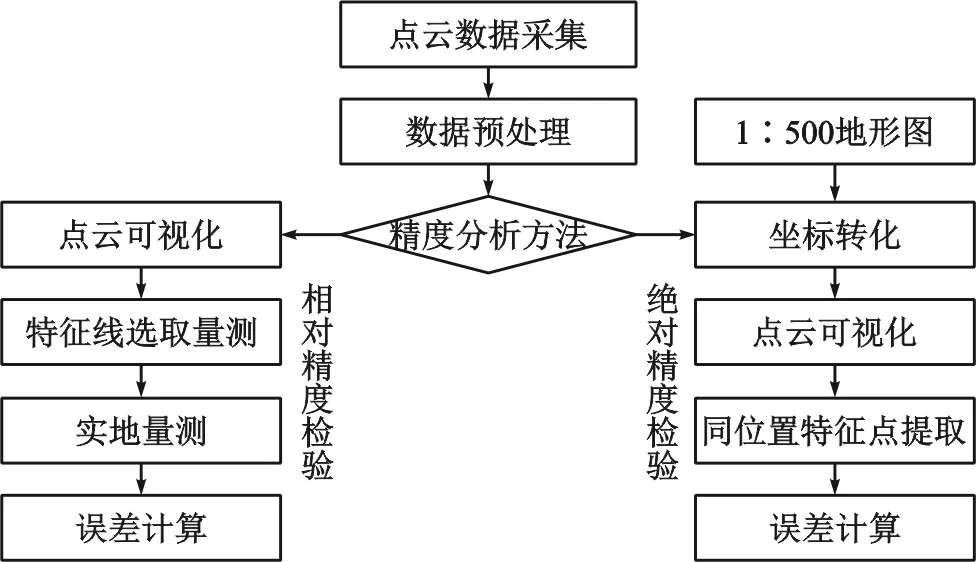
图2 相对精度检验和绝对精度检验流程
相对精度验证的主要步骤如图2所示,包括背包测量数据采集,点云数据可视化,传统方式数据采集(全站仪、RTK),数据特征点选取,特征线距离量测,点云特征线作为观测值,传统方式采集的特征线作为检核值,按照式(1)计算差值:
特征线差值=观测值-检核值
(1)
绝对精度验证的主要步骤包括背包测量数据采集,数据预处理,坐标转化,点云数据可视化,传统方式数据采集,数据特征点选取,将点云特征点作为观测值,传统方式作为检核值,按照式(2)计算点位差值:
(2)
其中x0、y0为点云观测值坐标,x1、y2为点云观测值坐标。
最后,根据差值计算点位中误差作为试验评价精度的标准:
(3)
4 数据采集与精度分析
4.1 室内测量
本次测量的室内区域为宁波规划大厦地下停车场,背包测量约为 20 min,采集的点云数据经过预处理后在Terrasolid中展开,如图3所示,在点云数据内选取柱子和房角点作为特征点,然后获取特征点间的水平距离作为观测值;同时利用全站仪在实际停车场内获取对应的同名特征点和特征线的水平距离作为检核值,得到室内停车场平面精度结果,如表1所示。
4.2 道路竣工
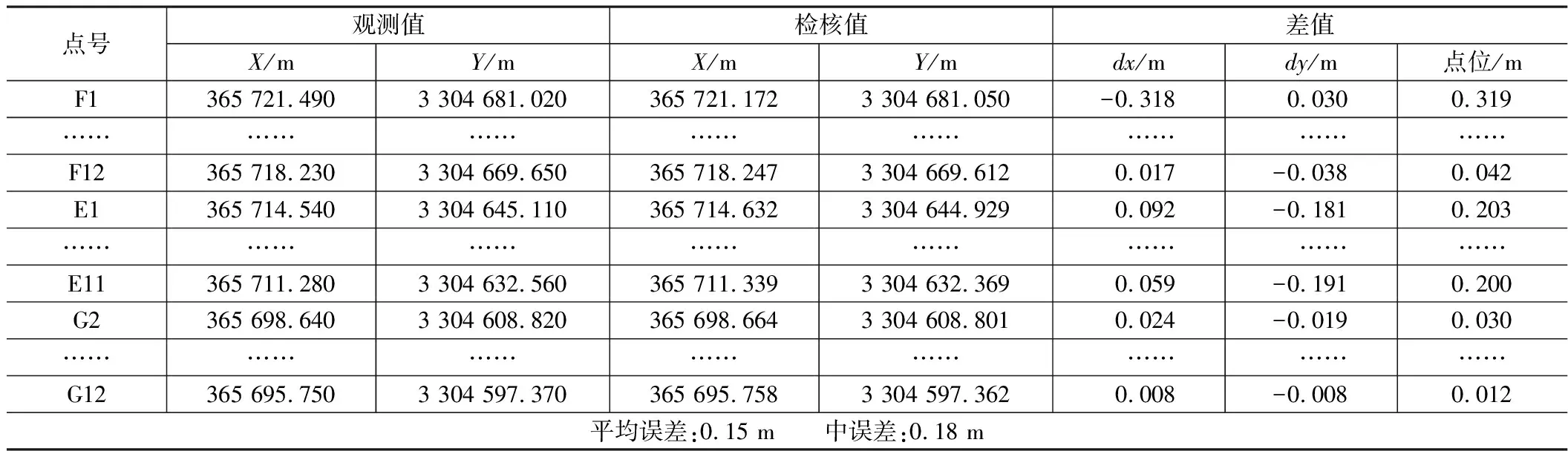
本次实验的道路为新竣工道路,长500 m,宽 10 m,包含完整路面、路灯、广告牌、斑马线等地物,扫描的点云数据经过静态差分、影像着色、坐标转化等预处理后,将点云数据和 1∶500地形图数据进行叠加,两者基本上吻合,在道路边线上存在一些偏差。从点云测量数据中提取两侧路灯中心点作为平面坐标观测值,然后从地形图中获取的路灯坐标作为检核值,19个点计算误差,结果如表2所示:

道路平面精度检核结果 表2
4.3 规划小区竣工
本次实验的小区为新建成规划小区部分数据,包含两幢30层高层建筑,一幢17层小高层,4幢6层的多层建筑,获取的点云数据如图4所示。
获取的点云数据经过影像着色、坐标转化等预处理后,将小区规划竣工图与地形图进行叠加,获取点云房角点作为观测值,在竣工图中获取其同名房角点作为检核值,并对34个点进行误差计算,结果如表3所示。

图4 规划小区
规划小区平面精度检核结果 表3
4.4 普通建筑竣工
选取的建筑为宁波东部新城新建的写字楼,包括规划大厦和工商大厦,相对于小区居民建筑,该建筑物间距离为 40 m左右,GPS信号较好,按“8”字形路线行走,行走距离为 700 m左右,获取其点云数据如图5所示。
在获取的建筑物点云数据中,选取房角点作为观测值,并在竣工图中获取对应的房角点作为检核值,对23个点进行点位差值和中误差计算,得到的结果如表4所示:

图5 规划大厦建筑群
4.5 精度分析
(1)将室内测量数据和普通建筑测量数据,根据选取特征点间距离和对应检核距离间的差值建立误差统计分布图,如图6所示,可以发现随着距离的增加其误差存在一个增大趋势。
(2)在小区测量中,将检核点和对应的误差在ArcGIS进行可视化分级表示,并与 1∶500地形图进行叠加,颜色越深误差越大,可发现北面的房子误差较大,南面的房子误差较小,如图7所示。经过分析发现北面有30层的高层对GPS信号产生遮挡,而南面为7层的多层,GPS信号相对较好,因此小区等建筑密集区GPS信号的强弱对测量有着重要影响。
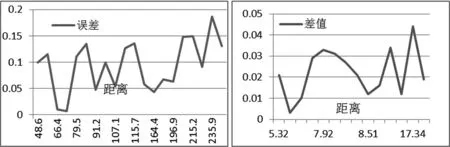
图6距离差值统计分布
图7 小区检核点误差分布
(3)通过扫描的点云数据完整性,发现移动测量系统的有效观测距离为 50 m~70 m,不能满足远距离测量项目,比如高层房产侧面测量等。
5 结 语
本文基于移动测量系统在城市测量应用中进行研究,分析其在具体测量业务中的精度。试验表明室内测量中,在相对坐标系下具有较高的平面精度,室内为 2.5 cm;在室外测量的绝对坐标系下,道路竣工为 14 cm,小区规划竣工 18 cm,建筑群竣工为 9 cm,且根据误差分布情况发现GPS信号对测量数据精度有重要影响,随着观测点间距离越大误差也存在增长趋势。由此看出,移动测量系统可满足室内和GPS信号较好区域的高精度数据采集,相对于车载移动测量对环境的限制,背包式移动测量更具有广泛的应用价值。如何利用SLAM技术解决室外GPS信号失锁区域的数据采集精度是下一步解决的问题。
猜你喜欢
幼儿教育·教育教学版(2023年2期)2023-06-23 11:18:58
昆明医科大学学报(2021年6期)2021-07-31 07:40:36
科学(2020年5期)2020-11-26 08:19:24
装饰装修天地(2020年7期)2020-06-01 18:43:59
小哥白尼(趣味科学)(2019年2期)2019-04-17 02:18:18
电子制作(2018年11期)2018-08-04 03:25:38
工业设计(2016年7期)2016-05-04 04:01:15
测绘科学与工程(2016年5期)2016-04-17 06:51:15
新校长(2016年8期)2016-01-10 06:43:49
电子设计工程(2015年3期)2015-02-27 12:03:45
