
一种纯电动汽车远程控制策略
2018-11-01 01:17王界行
汽车电器 2018年10期
石 也,王界行,肖 俊
(东风汽车股份有限公司新能源事业部,湖北 襄阳 441000)
由于新能源汽车的迅速推广与应用,带动了各种模式下的汽车租赁行业的蓬勃发展。为了对其进行有效监管,远程数据监控及锁车功能就显得尤为必要。为此在一定情况下,通过运营管理监控平台发送相关指令便可以使车辆进入限速行驶或者无法起动的状态。因此如何制定合理的控制策略成为远程锁车功能应用的关键所在。
1 相关名词
1)远程监控锁车:远程监控终端 (TBOX)接收到远程监控平台的锁车控制信号之后,通过CAN总线向整车控制器 (VCU)发送远程锁车控制信号。VCU根据锁车控制信号来决定是否限制车辆行驶。
2)远程锁车控制信号:TBOX_Lock信号 (TBOX_Lock=0x0101为解锁信号;TBOX_Lock=0x0102为锁车信号)。
3)行车限速模式:车辆能够行驶,但是速度限制在10 km/h范围内。仪表显示“远程限制功能开启”。
4)正常工作模式:包括车辆正常行驶模式和正常充电模式。
5)远程监控唤醒信号:整车低压上电后,VCU通过闭合低压主继电器给远程监控终端12 V电压唤醒信号。
2 工作原理
2.1 整车工作原理介绍
车辆的行驶模式和充电模式均需要先唤醒VCU,然后VCU再去唤醒其它低压用电器 (包括TBOX)。与此同时,VCU根据唤醒源进入到不同的工作模式,此处分为车辆行驶模式和充电模式。
2.2 锁车工作原理
锁车工作原理过程可以参考流程图 (图1)。
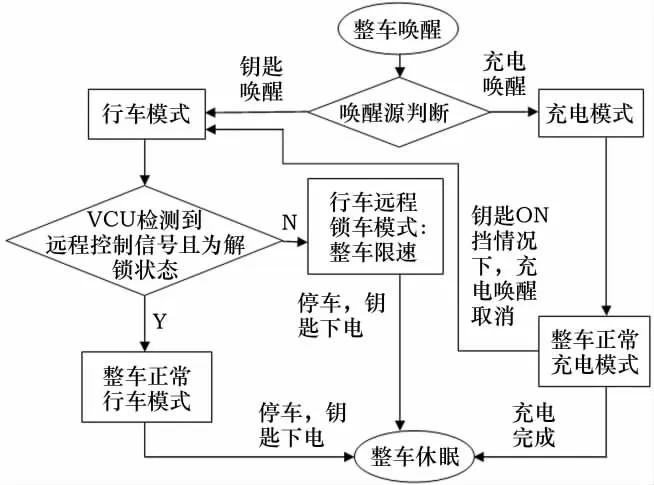
图1 锁车工作原理
2.3 锁车动作作用条件
1)“黄金1 s判断法则”,对于车辆处于行驶模式,VCU执行锁车动作的判断时间仅在唤醒TBOX的第1 s时间内,超过该检测时间的任何锁车指令对车辆无效,除非下电后再次上电,重新判断。
2)VCU唤醒TBOX后开始计时,1 s内收到TBOX的远程控制锁车信号则进入锁车工作模式,接收到远程解锁报文则进入正常工作模式。如果在这1 s内检测不到TBOX的远程控制报文也进入锁车工作模式。
3)充电唤醒后不去判断锁车信号,车辆能够正常充电。但是车辆工作模式由充电模式转换到行车模式,中间过程不断电情况下,可以从ON挡唤醒生效时刻开始执行“黄金1 s判断法则”。
3 远程锁车相关报文定义
3.1 网络拓扑
CAN网络中跟远程锁车相关的有整车控制器、远程监控、组合仪表 (ICU)等,其在CAN网络中的布置如图2所示。
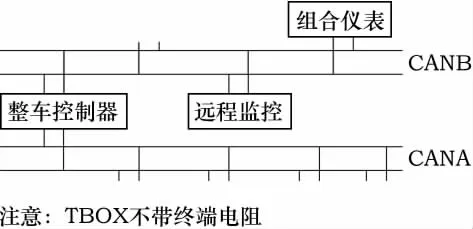
图2 远程锁车相关电器在CAN网络中的布置
3.2 网络链路层
遵循SAE J1939数据链路层协议 (J1939-21)的定义,以下为强调和补充的内容。
1)通信采用29位标识符的扩展帧,通信速率为250 kb/s。
2) 采用Intel格式。
3)采用单帧报文。
4)周期发送机制。
3.3 报文定义
远程监控锁车报文见表1。锁车信息仪表显示报文见表2。

表1 远程监控锁车报文
4 远程锁车控制流程图
1)整车行车模式下的远程锁车过程如图3所示。
2)整车充电模式下的远程锁车过程。
整车进入充电模式不进行锁车判断,也不执行锁车动作,充电功能正常进行。但是在钥匙处于ON挡位置的前提下,充电唤醒信号取消后,整车自动进入行车模式,则从此时开始1s内继续判断锁车信号。

表2 锁车信息仪表显示报文
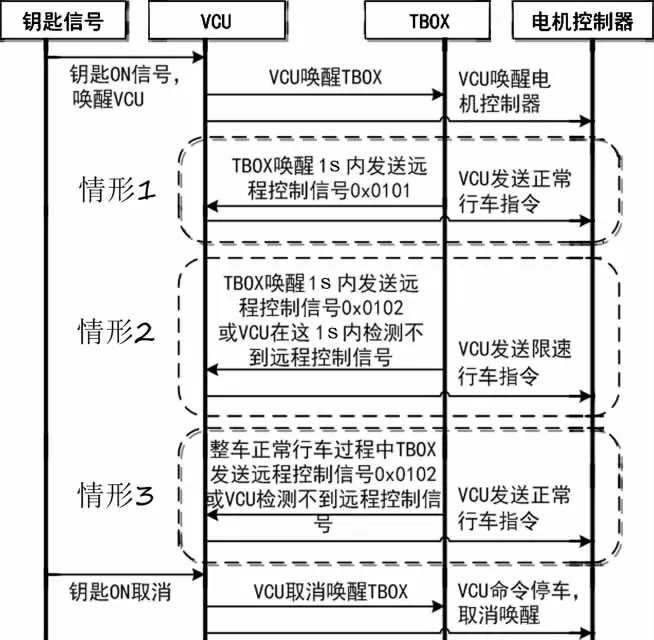
图3 整车行车模式下的远程锁车过程
5 总结
本文对一种纯电动汽车远程控制策略进行了详细的定义和论述,重点对远程锁车的控制方法和控制逻辑进行了具体的分析和研究,并以具体的流程图的形式来体现以便于理解。该控制策略已经实现成功应用,给运营方带来了高效可靠的车辆管理解决方案。
猜你喜欢
汽车电器(2022年9期)2022-11-07
电子技术与软件工程(2022年11期)2022-09-09
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年13期)2022-07-19
汽车实用技术(2022年12期)2022-07-05
防爆电机(2022年3期)2022-06-17
能源工程(2022年2期)2022-05-23
中国外汇(2019年11期)2019-08-27
