老旧小区立体车库节能式液压升降系统的设计
2018-10-30 04:56:02陆天宇雍嘉浩顾力强毛文华王一帆
传动技术 2018年3期
陆天宇 雍嘉浩 顾力强 毛文华 王一帆
(上海交通大学机械与动力工程学院,上海 200240)
0 引言
液压升降平台是一种应用范围较广的起重运输机械,它主要由基座、载重平台、支撑杆件、液压系统等部分组成。当升降平台载着重物上升时,由液压泵驱动平台上升,将液压能转化为势能;升降平台下降时,又将势能释放出来。因而,实现下降时释放的那部分势能的有效回收和利用,是实现其节能减排的关键点。近年来,这类升降平台的能量回收设计主要是通过液压蓄能的方式实现[1-4]。
液压系统的能量回收方式主要包括回馈电网式、液压蓄能式、机械式、变频调速式、变频-蓄能式等几种类型,其中变频-蓄能式能够实现较为理想的节能效果,同时实现对控制对象的调速。在液压电梯领域,目前已经有一些应用变频-节能方式的设计成果[5-6]。
本文涉及的立体车库剪叉式升降平台,在实现节能效果的同时,也需要保证系统平稳可靠的运行,使平台能够按照给定的速度曲线运行,保证平台上运载车辆的安全。因此,本文将液压蓄能、变频调速、阀控调速等技术结合起来,设计出一种液压升降系统,以实现上述目的。
1 立体车库结构设计
1.1 立体车库概述
老旧小区无法提供连续的大片场地,且车位比较靠近住宅楼,立体车库会对住户的采光造成一定的影响。考虑到这些因素,我们设计了如图1所示的立体车库,它由车库框架、搬运器、液压升降机构等部分组成。车位架被放置在二层,上面能够停放三辆汽车,在车位架的下方,还能够像原来一样停放三辆汽车。车库通过液压升降机构和搬运器实现二层车辆的停放。升降平台上放置三组光电传感器,其中前后两组用于检测驾驶员是否正确停放车辆,中间一组用于感知升降平台与搬运器是否完成车辆交接。
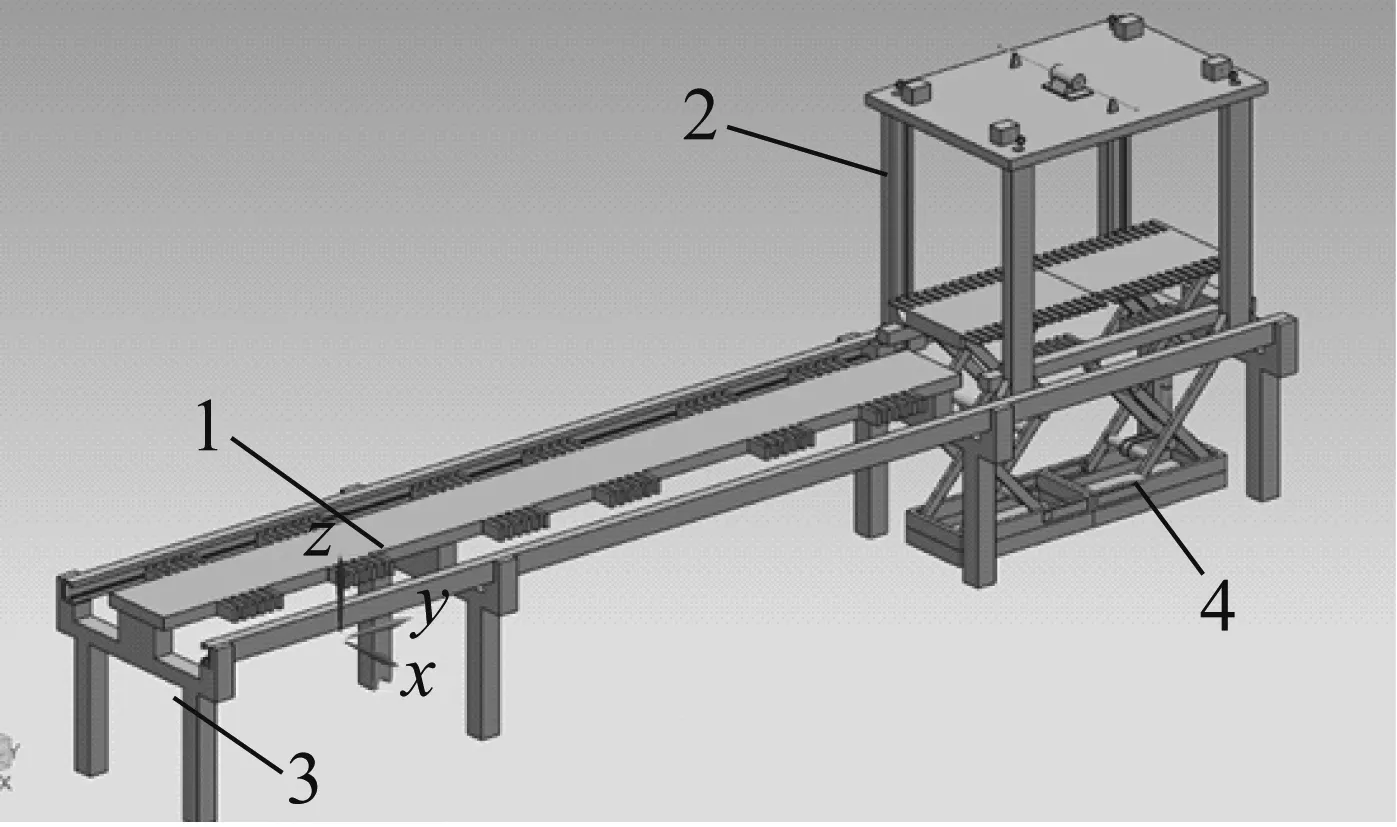
1.车位架 2.搬运器 3.车库框架 4.液压升降机构
1.2 立体车库工作过程
(1) 存车流程。汽车驶入立体车库出入口的液压升降平台的提升叉梳的指定位置上后,司机停好车后下车并刷卡,控制系统运行并进行检测,判断无误后,开启阻车装置,选取空车位,判断要停车的位置。通过液压升降机构将车辆抬升至第二层,再通过搬运器将汽车停放至预定车位,此后各机构复位,等待下次存取车命令。
(2) 取车流程。司机在立体车库出入口刷卡后,控制系统运行,并根据卡号查找对应车辆的停放位置,再通过存取装置逆向运行存车动作,最后将汽车取到立体车库出入口,关闭阻车装置,司机将车辆开离立体车库。系统检测到汽车驶离后,各机构复位,等待下次存取车命令。
1.3 升降机构的选择
本立体车库中的搬运器需要在车库框架上的水平轨道上移动,因此此系统需要升降机构不借助四周的轨道,而是通过车辆入口上方的空间将车辆抬升至第二层。而且,考虑到老旧小区中可用于规划立体车库的空间大多靠近小区居民楼,两层车位的设计对住户采光的影响相对较小,因此车库的升降机构在垂直方向的移动距离不大。我们考虑过通过开关磁阻电机驱动升降系统,并通过蓄电池与超级电容组成的储能元件作为储能元件,回收升降系统制动过程中的能量。但是考虑到老旧小区对系统可靠性、成本方面的要求,我们选择系统相对简单、技术更加成熟的剪叉式液压升降系统,并在此基础上进行节能方面的设计。液压传动具有操作控制简单方便、可实现过载保护、噪音小、工作平稳等优点。
2 液压升降系统设计
2.1 系统概述
本方案中将蓄能器节能、阀控调速、变频调速等技术结合起来,设计出如图2所示的适用于上文立体车库中剪叉式升降机构的阀控-变频式液压系统,以达到节能的目的。
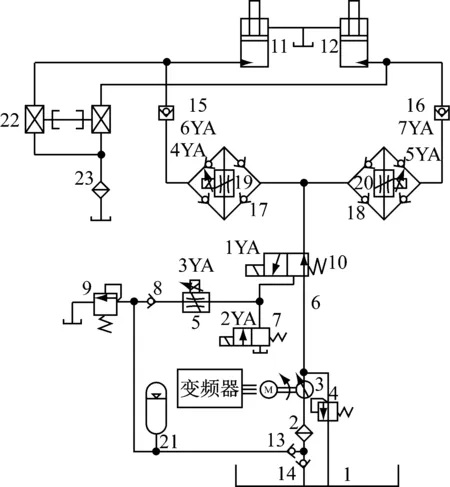
1.油箱2,23.滤油器3.液压泵4,9.安全阀5,19,20.电液比例调速阀6,8,13,14.单向阀7.二位二通阀10-二位三通方向阀11,12-液压缸15,16-电磁单向阀17,18-桥式整流板21-蓄能器22-手动下降阀
图2 液压升降系统原理图
Fig.2 Hydraulic lifting system schematic diagram
2.2 系统设计
此系统的能量回收原理为:平台下降时,一部分势能可以转化为液压能,可将其储存于蓄能器中;另一部分势能在油液流动过程中转化为热能。平台上升时,蓄能器内部的压力油液释放出来,补充给液压泵,使再次上升过程中液压泵消耗的电动机功率减少;同时,容积调速技术的使用,也能够减少节流能量损失,从而达到节能的目的。
此系统采用桥式整流板9、10保证液压缸同步;采用二位二通阀7实现平台的快速下降,分别采用PLC控制的电动机和电液比例调速阀5调节速度,以实现预定的速度曲线;采用二位三通方向阀10控制液压缸的运动方向。系统的工作压力由溢流阀4限定;蓄能器9的工作压力由溢流阀9限定。手动下降阀22用于断电或液压系统因故障无法正常运行时,通过手动操作使平台以较低的速度下降。在此系统的设计过程中,在实现能量回收功能、满足系统平稳可靠运行的条件下,尽量减少元件数量,简化系统结构,以降低系统成本,便于系统维护。
2.3 主要参数
此系统的主要参数如表1所示。
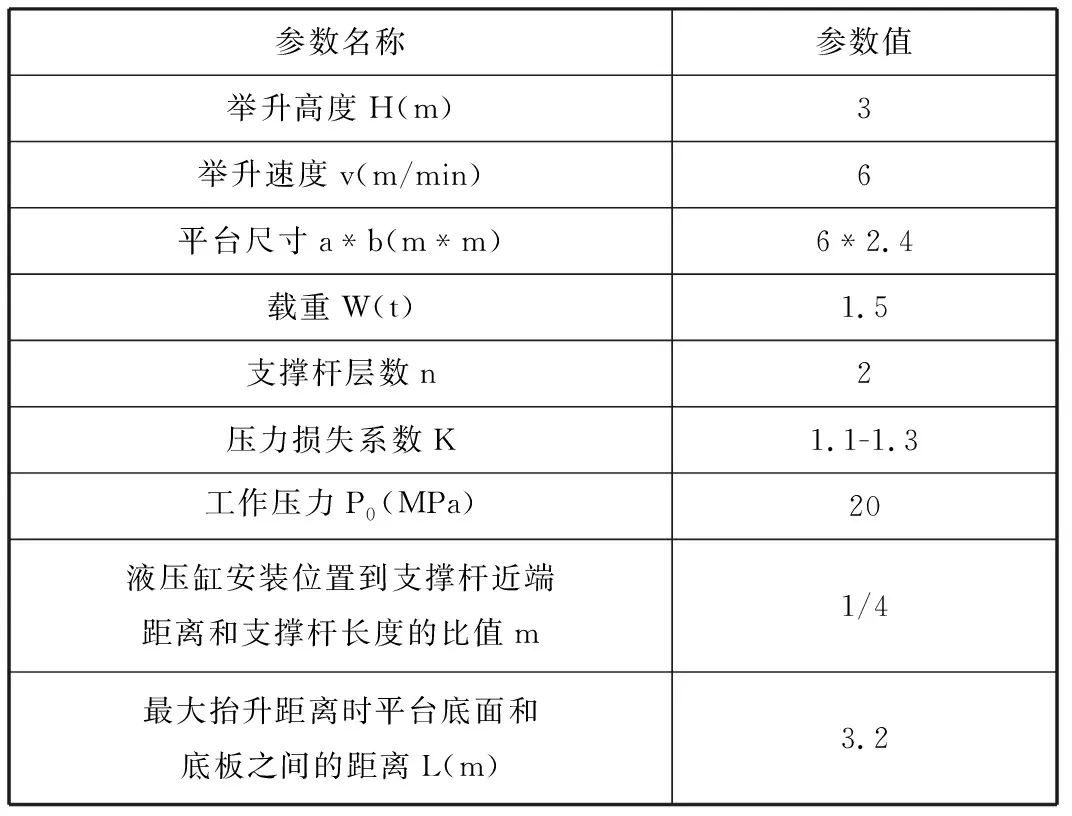
表1 系统主要参数Table 1 Main parameters
根据表1,由式(1) 可计算得到液压缸行程:
S=2mL/n(mm)
(1)
此外,系统流量由抬升速度及液压缸有效直径决定,蓄能器的压力可根据式(2)计算得到:
p=KWH/V(MPa)
(2)
蓄能器的工作容积应略大于平台从最高处下降至最低处时液压缸所排出的油液总体积。
3 系统工作原理
本液压系统存在以下5个工作状态:
(1) 初次上升。最初,蓄能器21中没有压力油。PLC得到平台上升指令后,主电动机启动,液压泵从油箱里吸油,使油箱中的油液进入液压缸11和12,使得液压缸的活塞杆伸出,提升升降平台。在平台上升的过程中,控制器将读取并处理检测到的平台位置信息,然后将先后传递至变频器,这样液压泵能够按照控制器的速度指令工作,升降平台能够按照预先设定的速度曲线完成加速-匀速-减速的运动过程。
(2) 停留。升降平台到达指定位置时,控制器接收到停止信号,此时液压泵3停止工作,升降液压缸的回油通道都被可靠封闭,升降平台能够可靠地停留在指定位置。
(3) 下降。PLC得到平台下降指令后,二位三通方向阀10的电磁铁1YA通电,电磁单向阀15、16得电,液压缸中的压力油液将被存储在蓄能器内。油液蓄能器中的压力液体可能导致液压缸下降不到位,此时可以使2YA通电,液压缸中残留的油液就可以经过二位二通阀7的左位回到油箱,使升降平台复位。平台下降时,控制器接收平台位置信号,并向电液比例调速阀5发送速度调节指令,调节调速阀阀口的开度,进而使平台按照预先设定的速度曲线下降。平台复位后,控制器接收到相应的信号,电磁铁1YA断电,二位三通方向阀回到右位。
(4) 快速下降。当遇到车辆进出频繁等需要平台快速下降的特殊情况时,可以使5YA、6YA、1YA和2YA都通电,使液压缸中的油液无阻力地回到油箱,从而实现快速下降。单向阀8可以防止蓄能器中的油液回到油箱。
(5) 再次上升。此时二位三通方向阀10处于右位,且单向阀16中上腔的压力大于下腔,液压泵3优先从蓄能器21中吸收油液供给至两个液压缸中,进而完成相应的上升动作。若蓄能器中的油液不足以使平台到达指定的高度,液压泵3将从油箱中吸油,使得平台上升到指定位置。
动作中,各电磁阀的电磁铁得失电情况如表2所示。

表2 电磁铁动作表Table 2 Action of the electromagnets
4 系统控制部分设计
立体车库整体控制系统的核心为PLC,液压升降平台也可以作为其中的一部分接入控制系统中,从而实现上文所述的工作过程。升降平台部分包括平台上的位置传感器、光电传感器、监测平台是否到达上、下两个指定位置的两个行程开关等6个输入信号,和控制主电动机的变频器、液压系统中的电磁阀等8个输出信号。I/O口地址分配表、升降平台部分的程序流程图以及存车过程的梯形图分别如表3、图3和图4所示,其中sensor1、sensor2、sensor3分别表示上升、下降两个过程中指定位置的行程开关以及检测是否完成车辆交接的光电传感器。
在升降平台的工作过程中,PLC接收平台上位置传感器的输入信号,通过对变频器或电液比例调速阀5的控制,实现上升、下降阶段的调速。PLC也会接收上、下两个指定位置限位开关的输入信号,控制相应的电磁铁,实现工作状态的切换。系统突然断电时,所有电磁铁均断电,此状态与升降平台的停留状态相似,液压缸中的压力油液无法流出,平台可以可靠地停留在断电前的高度上,不会突然坠落,造成车辆的损坏。此时,如果需要平台下降,可以操作手动下降阀22,使平台以较低的速度下降。

表3 I/O口地址分配表Table 3 I/O address assignment
平台前后两端设置的光电传感器,对停车辆的尺寸做出了限制。车辆尺寸超标时,至少会使其中一个光电传感器无法接收信号,此时车库会提升车主将车辆停放在下层。这两个传感器也可以检测车辆是否正确停放在升降平台上,防止车辆、车库在系统工作过程中受到损坏。平台中间的光电传感器放置在较高的位置上,以确保车辆交接已经完成,确保系统工作的可靠性。
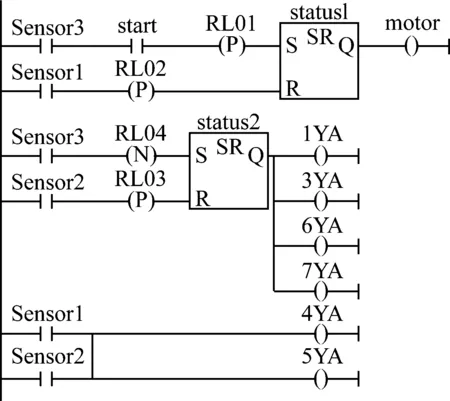
图4 存车程序梯形图Fig.4 Trapezoidal diagram of car storage program
5 结论
本方案在为老旧小区设计的一套立体车库方案的基础上,以剪叉式液压升降平台为原型为其设计了相应的液压系统,并将其控制部分融合至立体车库整体的控制系统中。液压传动具有功率大、结构简单、运行平稳、易于控制、造价较低等特点,适用于本文提出的小型立体车库。同时,设计中综合运用蓄能器节能、变频调速、阀控调速等多种技术,实现了节能的目的。此设计方案也可推广至其他需要频繁升降,且对升降过程中的速度曲线有要求的场合。
猜你喜欢
现代制造技术与装备(2021年9期)2021-04-03 13:44:40
通信电源技术(2018年5期)2018-08-23 01:15:34
电子制作(2017年2期)2017-05-17 03:54:53
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27 06:31:45
湖北农机化(2014年1期)2014-12-29 00:42:50
中国修船(2014年5期)2014-12-18 09:03:08
汽车零部件(2014年10期)2014-11-11 12:25:06
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:56
电子设计工程(2014年12期)2014-02-27 11:58:11
中国新技术新产品(2013年6期)2013-05-12 09:39:26