
小型条纹管数值模拟及实验研究∗
2018-10-26 09:42田丽萍李立立温文龙王兴陈萍卢裕王俊锋赵卫3田进寿3
物理学报 2018年18期
田丽萍李立立温文龙王兴陈萍卢裕王俊锋赵卫3)田进寿3)
1)(中国科学院西安光学精密机械研究所超快诊断中心,西安 710119)
2)(中国科学院大学,北京 100049)
3)(山西大学极端光学协同创新中心,太原 030006)
1 引 言
作为非扫描式成像激光雷达之一的条纹变像管成像激光雷达(streak tube imaging lidar,STIL),具有宽视场、高帧率、高可靠性和体积小的巨大优势,广泛应用于军事和航天等领域[1,2].条纹管成像激光雷达系统的探测视场由阴极可探测狭缝长度和狭缝方向的空间分辨率二者共同决定,狭缝长度越长,空间分辨率越高,相同精度要求下的探测视场越大[3−5].传统条纹变像管在追求较高时间分辨率时往往引入了超精细结构栅网以提高阴极附近的电场强度,但也增加了打火的概率而影响条纹相机的稳定性和可靠性[6,7].而且,传统的条纹变像管体积较大,严重制约了STIL系统的小型化,进而限制了STIL系统在无人机载及星载探测领域的应用.
为满足STIL系统对条纹管的大探测面积、高空间分辨率以及小型化等应用需求,各单位研制出了一系列条纹变像管.其中,Photonis研制的P920型条纹管长度为159 mm,但其可探测狭缝有效长度也极为有限,仅为10 mm;俄罗斯科学院研制的PF-M型条纹管长度仅为110 mm,且空间分辨率高达30 lp/mm@Φ25 mm,但其放大倍率为1,亮度增益较低,不利于成像激光雷达的远距离高信噪比探测[8];英国Photek公司研制的ST-X型条纹管,其探测面积为18 mm×3 mm且扫描方向的空间分辨率高达36 lp/mm,但对狭缝方向的空间分辨性能研究较少[9,10].
本文以提高条纹变像管狭缝方向边缘空间分辨率为主要研究目标,同时兼顾尽可能高的时间分辨率及亮度增益,通过分析影响条纹变像管时空分辨率的物理机制,研制了一款适用于无人机载及星载成像激光雷达探测系统的高电耐性和高可靠性的高亮度增益小型化条纹相机.数值计算了球面光电阴极和球面荧光屏时条纹变像管的时间分辨率和空间分辨率.模拟分析了平面阴极和球面阴极时的荧光屏动态扫描像畸变情况,结果显示,球面光电阴极能够明显减小狭缝像边缘部分的畸变,提高时间-空间(光谱)探测精度.相机测试结果显示:光电阴极有效工作面积区域16 mm×2 mm内,狭缝方向静态空间分辨率远高于15 lp/mm@CTF=11.64%(CTF表示对比度传递函数),边缘(距离光轴8—9 mm 处)动态空间分辨率高于9.8 lp/mm@CTF=5.51%.时间分辨率优于54.6 ps@Tscreen=4.3 ns(Tscreen为全屏时间),且在整个有效工作面积内具有较好的一致性,动态范围为345:1@54.6 ps.此款小型条纹相机不仅具有较高的边缘空间分辨率,更重要的是其亮度增益高达39.4.
2 条纹变像管电子光学设计
2.1 相机组成
图1所示为小型条纹相机系统的结构及实物图.其基本组成部分有:前端输入狭缝光学耦合系统、7200型条纹变像管、像增强器、后端输出耦合透镜、电荷耦合器(CCD)记录系统、变像管高低压供电电源模块和扫描电控模块及信息处理系统.当外界待测目标反射信号通过狭缝及输入光学系统成一维空间图像并耦合进光电阴极时,光电阴极由于外光电效应产生携带相同信息的光生电子信号,在外部电场作用下加速、聚焦,光电子到达偏转板系统入口处时受偏转板上所加载的线性斜坡电压作用,在荧光屏上沿扫描方向依次展开,从而获得三维信息.在狭缝方向表示一维空间信息,在扫描方向表示不同时刻的景深信息,扫描图像的强度表示阴极输入目标光信号的强度.单次扫描图像只能给出选通区域内待测目标的一个剖面轮廓像,利用相应的算法对多次扫描图像进行重建可以给出目标物的四维像(三维距离像+一维强度像)[11,12].像增强器将条纹变像管荧光屏上强度微弱的图像信号放大增强,并由后端耦合CCD图像采集系统进行记录,从而实现超快时间信号向低速空间图像信号的等价转换,完成对输入光信号的时间、空间和光强等信息的记录.

图1 小型条纹相机结构及实物图Fig.1.Schematic and photo of the small-size streak camera.
条纹变像管是决定条纹相机整体性能指标的核心器件.针对影响条纹变像管时空分辨率的主要因素[13],本文在理论设计中采取了以下措施:1)采用球面光电阴极和球面荧光屏,有助于减小傍轴和远轴处电子脉冲的光程差和球差,提高条纹管边缘空间分辨率以减小时间畸变;采用使中心电子束欠聚焦、边缘电子束过聚焦、最佳成像点位置偏移阴极中心的方法进一步提高边缘空间分辨率;2)采用狭缝栅极代替传统的栅网式加速电极,有利于提高条纹管的光子效率及亮度增益;采用狭缝栅极各向异性加速结构能够增大电子束斑最小直径,从而减弱空间电荷效应,增大条纹变像管的动态范围;更重要的是,相比于栅网式加速结构,采用狭缝电极能够避免电子与栅网碰撞生成二次电子,有利于降低条纹变像管的背景噪声;3)采用二折偏转板以保证光电子在不被偏转板截获的情况下获得较高的偏转灵敏度,从而降低偏转系统功率,提高时间分辨率,同时又能够降低条纹相机对扫描电压斜率的要求;4)采用具有圆孔阑的球面锥状阳极,不但能截获大角度发射电子,更重要的是能够减小聚焦场和偏转场之间的相互干扰,以降低条纹管的偏转散焦[14,15];5)研制的条纹变像管长度仅为140 mm且加速电压高达−15 kV,减小了由于空间电荷效应引起的光电子的轴向时间弥散和横向空间弥散,进一步提高时空分辨率.小型条纹变像管的样管如图2所示.

图2 小型条纹变像管实物图Fig.2.Prototype of the small-size streak tube.
2.2 空间分辨率
在光电阴极内表面沿狭缝方向每间隔1 mm的位置发射初始状态服从特定分布的光电子束[16],追踪电子轨迹并统计其在荧光屏上的分布.定义空间调制传递函数(SMTF)曲线降至5%时对应的空间频率为条纹变像管的空间分辨率.数值计算狭缝方向静态空间分辨率变化曲线如图3(a)所示,最佳成像点偏移中心2—3 mm.条纹管边缘处静态空间调制传递函数(SSMTF)如图3(b)红色曲线所示,静态空间分辨率为48.5 lp/mm@MTF=5%.动态扫描模式下,数值计算了全屏时间为50 ns(扫描速度为1.667×10−3c)档位下狭缝方向的空间分辨率.SMTF如图3(b)蓝色曲线所示,动态空间分辨率为30.26 lp/mm@MTF=5%.条纹变像管的放大倍率为0.76,因此,条纹变像管光阴极处静态空间分辨率为36.9 lp/mm@MTF=5%,50 ns扫描档位下,条纹变像管光阴极的动态空间分辨率为23 lp/mm@MTF=5%.

图3 (a)狭缝方向条纹管静态空间分辨率变化曲线;(b)条纹管边缘处SSMTF和动态空间调制传递函数(DSMTF)Fig.3.(a)Static spatial resolution of the streak tube along slit direction;(b)SSMTF and DSMTF of the streak tube.
2.3 时间分辨率
为了适用不同景深及精度的探测需求,条纹相机设置有6个扫描档位(分别为4.3 ns,50 ns,90 ns,500 ns,1µs和2µs),扫描速度越快,时间分辨率越高[17,18].本文仅数值计算最快扫描档位时条纹变像管的时间分辨率.从光电阴极中心发射如图4(a)所示的半高全宽为8 ps、间隔54.6 ps的三束电子脉冲序列δ1,δ2和δ3,每个脉冲包含3000个光电子.为了使扫描后的电子斑尽可能分布于荧光屏中心位置以降低偏转散焦和像差等对像质造成影响,给偏转板施加444 V预偏电压,偏转板上加载扫描速度为5.8×106m/s的线性时变扫描电压.最终,三个脉冲序列的扫描图像在荧光屏上的分布如图4(b)蓝色电子斑所示.红色曲线给出了光电子沿扫描方向的强度归一化曲线,光电子在扫描方向的概率分布曲线的鞍峰比为0.132,远小于瑞利判据要求的0.7.因此,该条纹变像管的时间分辨率优于54.6 ps.

图4 阴极发射光电子脉冲及扫描结果 (a)间隔54.6 ps的光电子脉冲;(b)扫描图像Fig.4.Emitted electron pulses from photocathode and scanning image:(a)Electron pulses with 54.6 ps interval;(b)results of the scanning image.
2.4 球面光电阴极、球面荧光屏条纹管和平面光电阴极、平面荧光屏条纹管空间分辨率比较
为了评估球面光电阴极、球面荧光屏条纹管(S-条纹管)和平面光电阴极、平面荧光屏条纹管(P-条纹管)的空间分辨特性,模拟分析两种条纹管离轴不同距离处的空间分辨率,如图5所示.S-条纹管在离轴8 mm处的空间分辨率为48 lp/mm@MTF=5%;P-条纹管在离轴5 mm处的空间分辨率为49 lp/mm@MTF=5%,且离轴越远,空间分辨率越低.若取光电阴极空间分辨率高于35 lp/mm@MTF=5%,则S-条纹管的有效探测面积为16 mm×2 mm,P-条纹管的探测面积仅为10 mm×2 mm.

图5 S-条纹管及P-条纹管空间分辨率Fig.5.Spatial resolution for S-streak tube and P-streak tube.
2.5 球面与平面阴极条纹管动态狭缝像比较
平面光电阴极上离轴不同高度的物点,发射的光电子到达荧光屏的渡越时间不同,会导致平直狭缝在荧光屏上的扫描图像成弯曲状,从而影响时间-空间探测精度[19].数值计算平面及球面光电阴极条纹管离轴8 mm处的时间畸变分别为110 ps和−10 ps.此外,计算全屏时间4.3 ns,间隔为200 ps的两条狭缝扫描图像如图6所示,其中蓝色电子斑为平面光电阴极时荧光屏上的扫描图像,红色电子斑为球面光电阴极时荧光屏上的扫描图像.显然,球面光电阴极扫描图像较平面光电阴极畸变小且几乎无弯曲.假设荧光屏处狭缝方向动态空间分辨率为10 lp/mm,取最小可分辨单元计算平面与球面阴极时光电子在荧光屏边缘处沿扫描方向的狭缝像弥散,结果如图7所示.弥散电子斑的半高全宽分别为0.19 mm和0.1 mm.可见,球面光电阴极条纹管电子斑的空间弥散比平面光电阴极条纹管小,具有更好的空间分辨性能.

图6 球面及平面光电阴极狭缝扫描像Fig.6.Scanning image for plane and spherical photocathode.
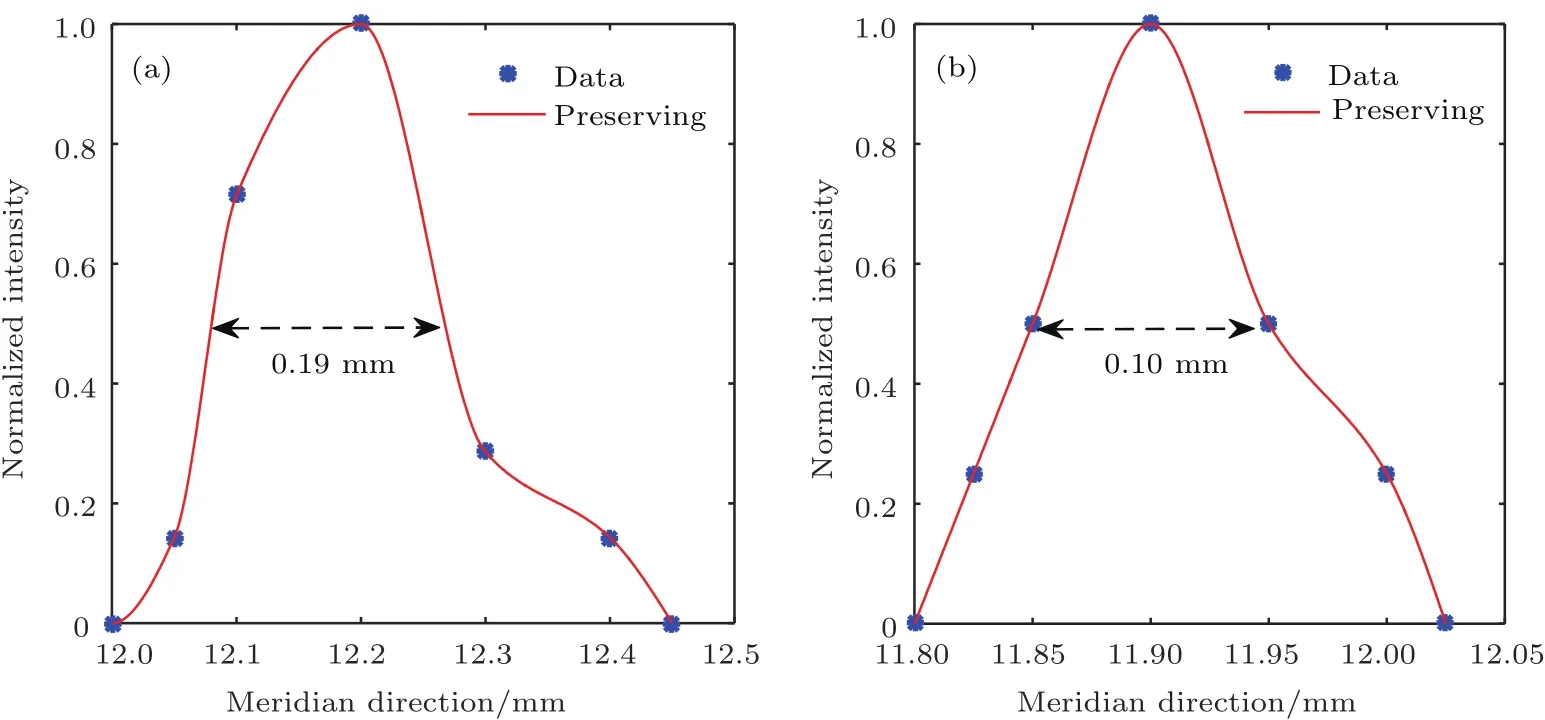
图7 狭缝像边缘处(x=6—6.05 mm)沿扫描方向的电子弥散 (a)平面阴极;(b)球面阴极Fig.7.Electron dispersion along the meridian direction at the edge of the slit image(x=6–6.05 mm):(a)Plane cathode;(b)spherical cathode.
3 条纹变像管静态性能测试
3.1 阴极辐射灵敏度及条纹管辐射功率增益测试
条纹管光电阴极的响应特性直接影响STIL系统的探测距离,而增益特性直接反映了条纹管对输入光信号的增强过程.分别采用阴极辐射灵敏度(PRS)和辐射功率增益(REG)表征光电阴极的光谱响应特性及条纹管对输入光信号的增强能力.PRS测试中,采用遮光孔径为Φ16 mm的光阑,阴栅电极之间加载+200 V(光电阴极几乎辐射饱和)的恒定直流加速电压,光阴极辐照光信号的功率密度为1 mW/m2.测试光电阴极的光谱灵敏度如图8蓝色曲线所示.REG测试中,条纹变像管各电极加载工作电压,由于变像管是像缩小型管(放大率仅为0.76)且加速电压高达−15 kV,因此REG较高,测试结果如图8红色曲线所示.实验结果表明:REG和PRS具有较高的一致性,而且最佳响应波长在550 nm,接近STIL系统常用激光中心波长532 nm,相应的PRS为38.11 mA/W,REG为18.82.采用栅网加速电极的5200条纹管,电子的传输效率较狭缝栅极的低30%—40%,且放大倍率为2,亮度增益仅为0.25.因此,相比于5200条纹管,该小型条纹管对STIL进行远距离探测具有极大优势.

图8 条纹变像管PRS及REG曲线Fig.8.PRS and REG test.
3.2 条纹变像管MTF测试
采用中心波长为590 nm、强度为10 lx的连续光辐照光电阴极,测试小型条纹管光阴极狭缝方向不同区域MTF曲线,如图9所示.光电阴极中心空间分辨率为35 lp/mm@MTF=10%,最佳成像点偏移到了离轴4 mm处的光阴极内表面,空间分辨率为35 lp/mm@MTF=13%.可以看出,在整个阴极狭缝有效长度16 mm内,空间分辨率高于29.3 lp/mm@MTF=5%.

图9 小型条纹变像管SMTFFig.9.SMTF of the small-size streak tube.
4 条纹相机静态及动态测试
4.1 静态空间分辨率测试
图10所示为小型条纹相机静态及动态工作模式下的实验光路.分划板条纹沿狭缝方向周期排列,每个单元包含有7组宽度不同、占空比为50%的亮暗条纹,对应的空间分辨率分别为5,10,15,20,25,30和35 lp/mm.激光器发射1054 nm激光经2倍频后输出中心波长为527 nm、脉宽为8 ps的激光脉冲并辐照条纹相机光电阴极,激光脉冲所形成的光斑中心和边缘亮度相差较大,因此在光电阴极前适当位置处放置毛玻璃板,可以衰减和散乱强光,使激光脉冲信号较为均匀地辐照在分划板上.小型条纹相机采用外增强方式,增强器与荧光屏近贴耦合.实验过程中,根据条纹管静态实验电参数调节条纹相机各电极电压,合理调节像增强器电压,使CCD采集的分划板图像亮度适中便于观察记录.由于相机各模块之间的耦合会不可避免地降低空间分辨率,导致整机的空间分辨率较条纹变像管空间分辨率有所下降.
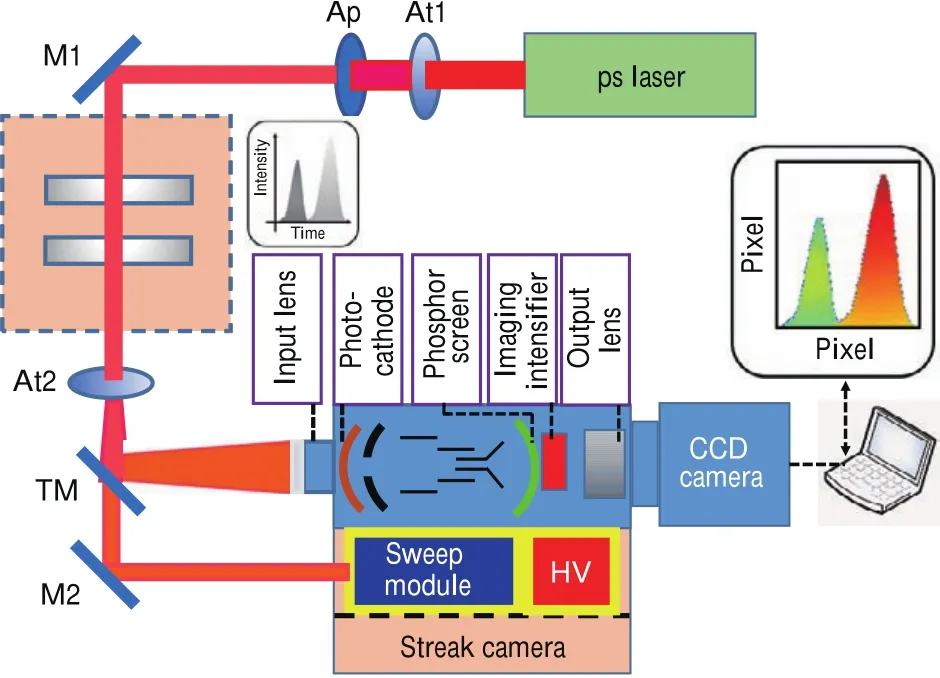
图10 条纹相机测试光路(M为反射镜;Ap为小孔;At为衰减片;TM为透反射镜)Fig.10.The experiment setup of testing static and dynamic spatial resolution for streak camera(M,mirror;Ap,aperture;At,attenuator;TM,trans flective mirror).

图11 静态空间分辨率测试结果 (a)静态图像;(b)强度分布Fig.11.Results of static spatial resolution test:(a)Static image;(b)intensity distribution.
图11(a)给出了CCD记录的分辨率板通过小型条纹相机所成的像;图11(b)为图11(a)框选部分的强度分布曲线,计算可知小型条纹相机的静态空间分辨率高于 10 lp/mm@CTF=11.64%,15 lp/mm@CTF=2.25%.实验中前端输入光学系统的放大倍率为0.667,因此,小型条纹相机光阴极处静态空间分辨率远高于15 lp/mm@CTF=11.64%.
4.2 动态空间分辨率测试
采用50 ns扫描档位进行动态空间分辨率标定,分划板五组图案对应的空间分辨率分别为:2.5,4.5,6.5,8和10 lp/mm.测得动态空间分辨率如图12(a)所示,框选部分的空间分辨率分别为2.5,4.5和6.5 lp/mm,对应的强度曲线分布如图12(b)所示,在4.5 lp/mm分辨率条纹处,计算得出对比度CTF=12.7%.在6.5 lp/mm分辨率条纹处,计算得出对比度CTF=5.51%.在条纹管光阴极边缘处(距离光轴8 mm)狭缝方向动态空间分辨率为9.8 lp/mm@CTF=5.51%.

图12 动态空间分辨率测试结果 (a)扫描图像;(b)强度分布Fig.12.Results of dynamic spatial resolution test:(a)Scanning image;(b)intensity distribution.
4.3 时间分辨率测试
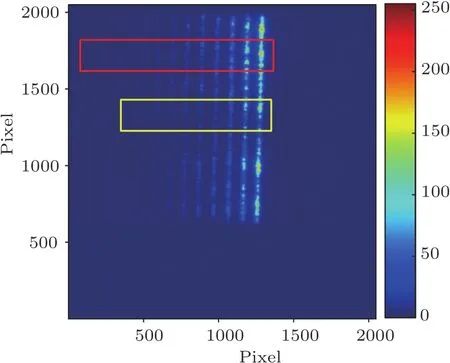
图13 动态时间分辨率测试结果Fig.13.Results of dynamic temporal resolution test.
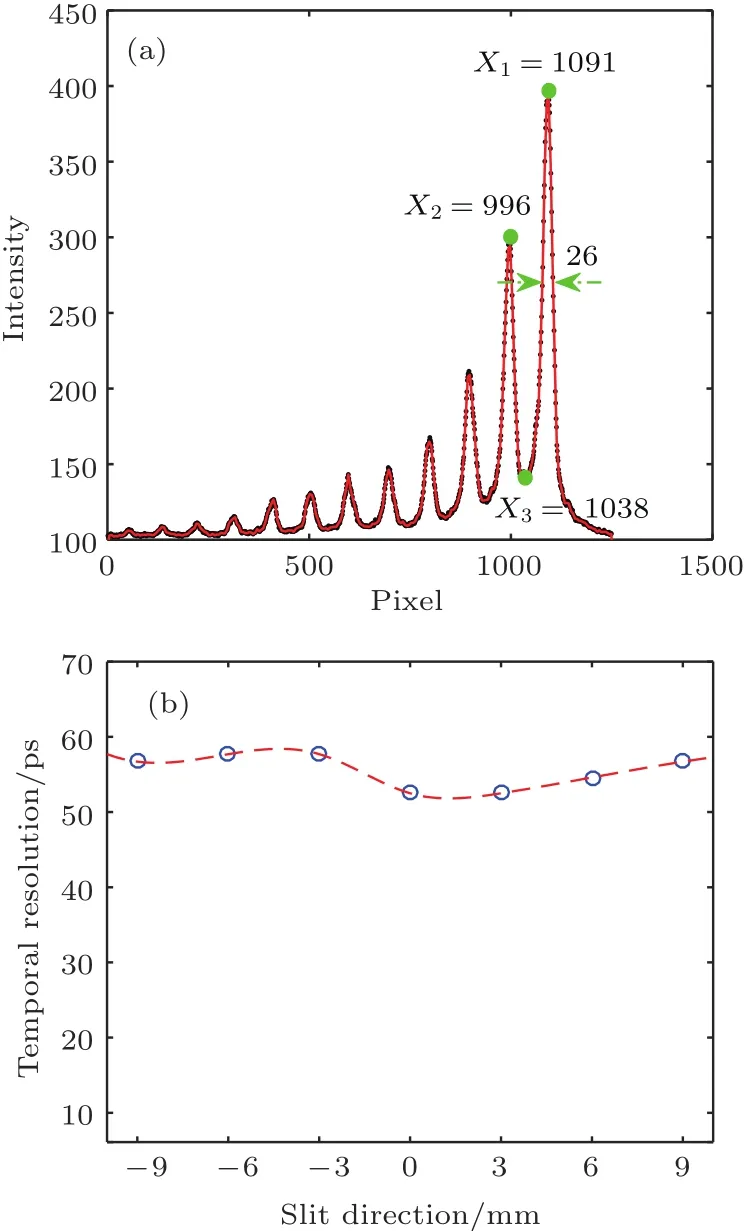
图14 离轴不同距离处动态时间分辨率 (a)强度分布;(b)时间分辨率Fig.14.Results of dynamic temporal resolution via different o ff-axis distance:(a)Intensity distribution;(b)temporal resolution.
采用半高全宽法标定条纹相机的时间分辨率.在扫描4.3 ns档位得到时间扫描图像如图13所示.图14(a)给出了图13黄色框选部分沿扫描方向的时间积分曲线.CCD的像素为2048×2048,光脉冲经过条纹相机后展宽,其半高全宽为26个像素,估算该小型条纹相机的时间分辨率为4.3 ns×(26/2048)≈54.6 ps.相邻两个脉冲序列强度的鞍峰比为0.3445,远小于瑞利判据要求的0.7,因此,该条纹相机时间分辨率优于54.6 ps.采用该方法测量计算沿狭缝方向不同位置处的时间分辨率,结果如图14(b)所示,可见在整个光阴极有效成像区域内,时间分辨率具有较好的一致性,验证了球面阴极、球面荧光屏时间畸变比平面型小的事实[20];时间分辨率测试结果较理论数值模拟结果低.可能的原因有:偏转散焦、空间电荷效应、装配误差、像增强器以及CCD耦合造成整机动态空间分辨能力下降,最终导致动态时间分辨率实测值低于理论计算值.
4.4 扫描非线性

计算图13红色框选部分的强度分布如图15所示,扫描速度非线性由(1)式给出Li为第i个峰值间距值,为脉冲间距的平均值,代入图15中的数值计算得扫描速度非线性σ=2.84%.
4.5 动态范围测试
采用分别计量最强信号和最弱信号强度之比的方法计算条纹相机的动态范围.图13中红色框选部分扫描图像强度分布曲线如图16所示.其中,条纹相机可探测最强信号强度Imax=516.6,最小信号强度Imin=104,背景噪声Ib=102.8,则小型条纹相机的动态范围D为

表1 小型条纹相机性能参数Table 1.Parameters of the small-size streak camera.

图15 扫描非线性测试结果Fig.15.Results of scanning nonlinearity test.

图16 动态范围测试结果Fig.16.Results of dynamic range test.

5 结 论
本文针对条纹管激光成像雷达系统的应用需求,设计了一种高边缘空间分辨率、高亮度增益和高时间分辨率的小型条纹变像管,在此基础上研制了一款小型条纹相机,具体性能参数见表1.采用球面光电阴极和球面荧光屏,阴极中心电子欠聚焦、边缘电子过聚焦的方法将条纹变像管的探测面积由10 mm×2 mm增大到16 mm×2 mm.设计加速电压高达−15 kV和放大倍率为0.76的像缩小型条纹变像管提高了条纹相机的亮度增益.采用狭缝栅极代替传统条纹管的加速电极,提高了条纹相机的电耐性和可靠性.针对不同的探测视场和景深需求,相机设置了6个不同的扫描档位.整个条纹管的尺寸仅为Φ40 mm×140 mm.条纹相机整机测试中,在阴极有效面积16 mm×2 mm内,条纹相机光阴极边缘静态和动态空间分辨率分别为15 lp/mm@CTF=11.64%和9.8 lp/mm@CTF=5.51%.时间分辨率高于54.6 ps@Tscreen=4.3 ns;动态范围高于345:1@54.6 ps.结果显示该条纹相机在无人机载或卫星搭载激光成像雷达探测中具有很好的应用前景.
猜你喜欢
哈尔滨轴承(2022年1期)2022-05-23
光子学报(2022年3期)2022-04-01
石家庄铁路职业技术学院学报(2019年3期)2019-10-30
小福尔摩斯(2019年2期)2019-09-10
制造技术与机床(2019年8期)2019-09-03
小学生必读(低年级版)(2019年9期)2019-04-13
小学生必读(低年级版)(2019年10期)2019-04-13
制造技术与机床(2018年9期)2018-09-19
娃娃画报(2014年9期)2014-10-15
中国医学装备(2012年8期)2012-01-26
