
基于鱼群算法的智能汽车换道轨迹规划
2018-10-26 08:19李传友王奥特饶勇翔
汽车实用技术 2018年20期
李传友,王奥特,饶勇翔
基于鱼群算法的智能汽车换道轨迹规划
李传友,王奥特,饶勇翔
(长安大学汽车学院,陕西 西安 710064)
智能汽车的轨迹规划是智能汽车研究领域的重点问题,文章通过对换道过程中车辆状态的分析,利用多项式函数规划智能车辆的换道轨迹,引入轨迹优化函数,对换道轨迹进行最优化选取,并基于鱼群算法对换道轨迹优化函数进行最优化选取。仿真结果表明该换道轨迹规划方法可平稳实现智能车辆的换道行为。
智能汽车;鱼群算法;轨迹规划;换道
前言
因换道而发生的交通事故占汽车行驶过程中发生的交通事故的大多数,特别是在发生事故后涉及到多条车道,因此有必要对汽车的换道行为进行研究[1]。智能汽车( Intelligent Vehicles) 是智能交通系统( Intelligent Transportation Systems) 的重要组成部分,在减少交通事故和提高交通效率方面发挥着重大的作用。轨迹规划是智能汽车自主驾驶行为必须涉及到的一项研究,因此对智能汽车的换道轨迹规划进行研究有很大的必要性。
已经被研究和验证了多种换道轨迹的规划方法[2]。利用弦函数进行换道轨迹规划易于实现,且容易调整,但初始横向加速度不为零。虽然圆弧换道轨迹具有最短的换道时间,但是横向加速度存在跳跃现象,这增加了横向控制的难度。梯形加速度换道轨迹虽无突变现象,但规划参数的选择较难,缺乏灵活性。
利用多项式生成换道轨迹,所需的车辆状态参数易于获取,且曲线平滑,利于规划算法进行扩展,所以本文利用多项式函数进行轨迹规划并加入鱼群算法对其进行最优求解。
1 基于多项式的换道轨迹规划
1.1 换道工况
换道行驶是汽车最常见的行驶工况,在轨迹规划中需要保证汽车平稳安全的行驶到目标车道。本文关注于一般的换道工况,在行驶环境中,传感器是智能车辆获得车辆内部信息和外部信息的关键,因本文研究重点在于换道轨迹的研究,所以假设传感器参数都为已知量。在换道过程中,智能车辆前方交通车相距较远,不讨论紧急情况的换道行为,即当前车道和相邻车道都有足够的换道空间。
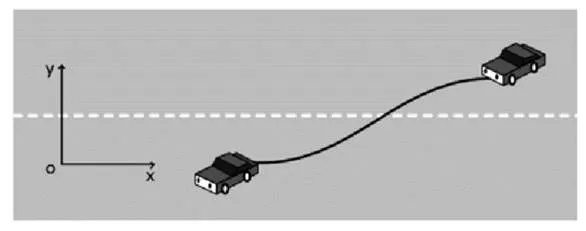
图1 换道示意图
汽车的换道示意图如图1所示,由于换道情景较为复杂,为了简化模型,对换道情景进行如下假设:
(1)在换道期间,忽略换道过程中的速度变化,换道车辆以恒速行驶;
(2)换道过程中,换道车辆纵向运动与横向运动相对独立;
(3)所有车辆规格相同,即车辆长度、宽度相同。
1.2 基于多项式的换道轨迹规划


则:
其中:
分析上式可知,式中只有t是未知量,因此可以用t表示多项式的各个系数,只要确定了t的值就可以确定换道轨迹。
2 轨迹优化函数
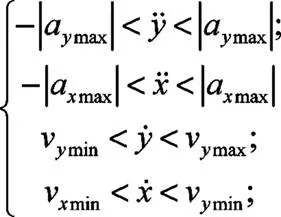
2.1 约束条件
上节的轨迹规划方法已经保证了轨迹曲线光滑和曲率连续,优化函数的约束条件应保证换道车辆的侧向和纵向的加速度和速度满足边界约束,避免因侧向加速度过大发生侧滑甚至冲出路面。即
2.2 目标函数
换道模型的目标函数J需要兼顾轨迹的行驶效率、安全性、经济型和舒适性,描述轨迹的综合性能[3]。为了简化运算难度提高轨迹规划的实时性,本文以车辆的行驶效率、安全性和舒适性为优化目标,在换道过程中,车辆安全隐患主要为换道车辆冲出道路边界,在规划算法中已对车辆的侧向位移提出约束,安全性得到了保障。换道过程中侧向加速度和换道时间是影响换道的两个主要因素,且相互矛盾,所以本文以车辆最大侧向加速度和换道时间为约束变量,为了弥补两个指标在数量级上的差异,对两者均进行无量纲化处理。
引入函数
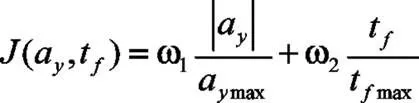
式中1和2为权重系数且1+2=1。
则轨迹优化函数为:
3 基于鱼群算法的轨迹规划
3.1 人工鱼群法
人工鱼群算法是一种基于动物行为的群体智能优化算法,是群体智能思想的一种具体应用[4]。人工鱼是一种抽象和虚拟化真鱼的实体,它所处的空间环境包括问题的解决空间和其他人工鱼的状态,并通过自身的活动影响环境进而影响其他人工鱼的状态。人工鱼群有四类行为,分别为:随机行为、觅食行为、聚群行为和追尾行为。
觅食行为是指鱼类倾向于食物的活动。人工鱼X在其视野内随机选择一个状态X

分别计算X和X的目标函数值Y和Y,如果发现Y比Y好,则X向X的方向移动一步:

否则,X继续在其视野内选择状态X,判断是否满足前进条件,反复尝试Tray-number次后,若没有满足前进条件,则执行随机行为。
聚群行为是指当伙伴中心有较多的食物且不太拥挤,则朝伙伴中心方向前进一步,否则执行觅食行为:

追尾行为是指伙伴的状态具有较高的食物浓度且不太拥挤,则朝伙伴位置前进一步,否则执行觅食行为:

随机行为是指人工鱼在视野范围内随机移动,当发现食物时会向食物增多的方向移动。

上式中X和X为人工鱼的个体状态;Y和Y人工鱼周围的食物密度即目标函数;Visual为感知距离;Step为步长;Rand()为随机数;Tray-number为最大试探次数。
3.2 基于人工鱼群的轨迹优化函数求解
人工鱼群算法具有以下优点:
(1)具有克服局部极值,取得全局极值的能力;
(2)算法中仅使用目标问题的函数值,对搜索空间具有一定的适应能力;
(3)对初值和参数选择不敏感、鲁棒性强、简单易实现、收敛速度快和使用灵活的特点[5]。
在鱼群算法中根据轨迹优化函数的特性对鱼群算法的参数进行选取。设人工鱼数为50只;最大迭代次数为50次;最大试探次数为100;感知距离为1;拥挤度因子为0.618;步长取0.1。
在食物密度函数中,取优化函数为鱼群算法的目标函数,即

在MATLAB中对鱼群算法的随机行为、觅食行为、聚群行为和追尾行为分别建立功能函数,并对规划算法进行仿真研究。
4 仿真分析
换道车辆在初始时刻的车速为60km/h,在t=0时进行换道,结束换道时主车的横向加速度和侧向加速度均为0,车道宽度取3.5m,相邻车道有充足的换道距离,在MATLAB和Carsim中进行仿真分析。利用鱼群算法对优化函数进行求解得到最优换道时间t=4.68s,仿真结果如图2所示。
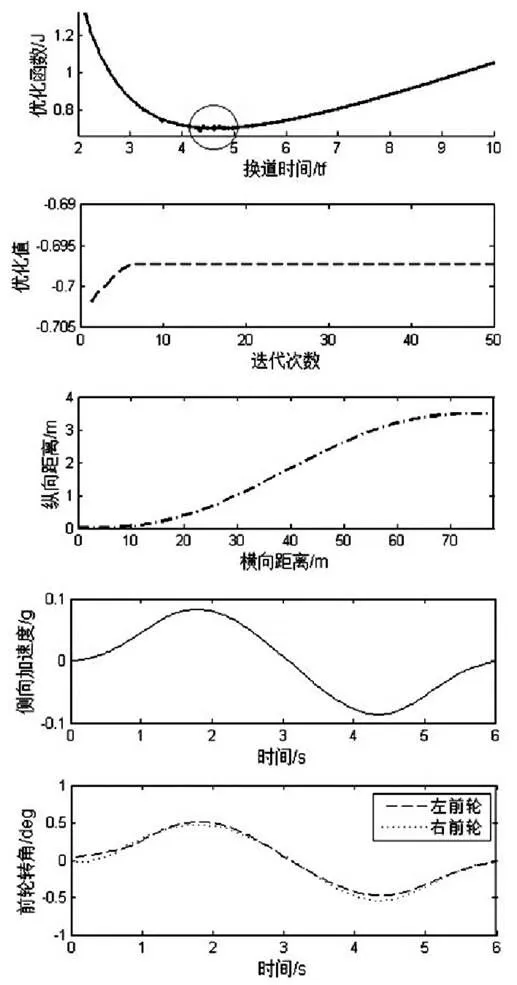
图2 仿真结果图
从仿真结果可以看出,规划出的轨迹曲率连续,且无突变现象,换道期间侧向加速度的最大值在0.1g以下,在合理的范围内,且前轮转角变化连续,无突变现象。
5 总结
本文在利用多项式进行轨迹规划的基础上,引入轨迹优化函数,对换道时间进行最优化选取,并利用鱼群算法对轨迹优化函数进行求解,得到换道时间的最优值,避免因人工选取换道时间带来的不确定性。在Carsim中进行了动力学仿真,验证了该换道轨迹规划方法的可行性。
[1] VAN DIJCK T,VAN DER HEIJDEN G A J.Visionsense: An Advan -ced Lateral Collision Warning System [C]//IEEE Intelligent Vehicl -es Symposium. Piscataway: IEEE, 2005: 296-301.
[2] 王畅,秦加合,郭明华,孙勤英,张文霞.智能汽车换道控制算法的仿真研究[J].计算机工程与设计,2013,34(07):2528-2532.
[3] 付骁鑫,江永亨,黄德先,黄开胜,王京春,陆耿.一种新的实时智能汽车轨迹规划方法[J].控制与决策,2015,30(10):1751-1758.
[4] 鲍海兴,曾志高,朱艳辉,文志强,杜坤,任松.一种变视野和步长的人工鱼群算法[J].湖南工业大学学报,2018,32(03):81-85.
[5] 郁磊,史锋等.智能算法30个案例分析[M].北京:北京航空航天出版社, 2015: 162-177.
Intelligent vehicle lane change trajectory planning based on fish swarm algorithm
Li Chuanyou, Wang Aote, Rao Yongxiang
(School of Automobile, Chang’an University, Shaanxi Xi’an 710064)
The trajectory planning of intelligent vehicles is a key issue in the field of intelligent vehicle research. This paper uses the polynomial function to plan the lane change trajectory of intelligent vehicles by analyzing the state of the vehicle during the lane change process. Introduce a trajectory optimization function to optimize the selection of the lane change trajectory. The optimal selection of the lane change trajectory optimization function is based on the fish swarm algorithm. The simulation results show that the lane changing trajectory planning method can smoothly realize the lane changing behavior of intelligent vehicles.
intelligent vehicle; fish swarm algorithm; trajectory planning; lane change
A
1671-7988(2018)20-35-03
TP242
A
1671-7988(2018)20-35-03
TP242
李传友,硕士研究生,研究方向为智能汽车轨迹规划与跟踪控制。
10.16638/j.cnki.1671-7988.2018.20.012
猜你喜欢
当代水产(2022年6期)2022-06-29
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
电子制作(2019年23期)2019-02-23
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
中外文摘(2017年19期)2017-10-10
中国篆刻·书画教育(2017年5期)2017-06-08
新高考·高一物理(2015年5期)2015-08-18
