
大角度转向电动汽车悬架与转向系设计
2018-10-26 08:19冯乾隆宋伟萍南友飞任田园
汽车实用技术 2018年20期
冯乾隆,宋伟萍,南友飞,任田园
大角度转向电动汽车悬架与转向系设计
冯乾隆,宋伟萍,南友飞,任田园
(长安大学汽车学院,陕西 西安 710064)
为了提高汽车转向灵活性及减小交通拥堵和提高停车空间利用率,基于轮毂电机及线控转向基础上,提出了一种可实现大角度转向的电动汽车模型,使其可实现90°大角度转向,从而提高汽车的转向灵敏性,并用SolidWorks软件对转向系与悬架进行设计,分析悬架系统设计的合理性。
大角度转向;转向系;悬架
前言
近几年,我国汽车行业发展迅速,引起了城市交通拥堵等一系列问题。而在轮毂电机驱动的基础上,发展可实现大角度转向的四轮独立转向电动汽车有利于解决城市交通拥堵,提高停车空间和道路利用程度[1-2]。这种设计也大大增加了汽车的操纵稳定性,使汽车动力响应快速和准确,在汽车停车入库方面也发挥了积极重要的作用。而要实现此功能,对汽车转向系统和悬架系统提出了更高的要求,需设计出能满足汽车90°大角度转向的转向系和悬架系统。
1 转向系统结构设计
为使汽车可实现大角度转向,在传统转向系上做一些改进,将传统机械连杆式转向机构由线性控制转向电机取代,通过齿轮齿条机构单独控制每个车轮的转向节,取消转向梯形机构等机械连杆机构,使每个车轮转向互不影响,同时每个车轮都由一个转向电机单独驱动,从而实现车轮独立转向。通过对转向电机的控制,使每个车轮的转角均达到[-36°,+90°],从而实现汽车多种转向模式。

1.控制器 2.转向电机 3.减速机 4.转向齿轮 5.滑轨 6.滑块单元 7.转向齿条 8,10.球头铰链 9.转向横拉杆 11.转向节臂 12.转向节
所设计大角度转向电动汽车转向系统三维模型如图1所示。将驾驶员作用在方向盘上的转矩信号通过传感器传至控制器1,经过控制器计算使转向电机2输出相应转速,经减速机3将动力传至转向齿轮4,经齿轮啮合,将动力传至齿条7,齿条7经球铰链8与转向横拉杆9相连,转向横拉杆9另一端又经过球铰链10与转向节12相连,最终动力经转向横拉杆9传至车轮实现汽车转向。
2 悬架系统结构设计
本设计选用不等长式双横臂悬架结构,对悬架的设计必须满足转向时各部件间不发生干涉,因此采用直角三角形结构,设计出的悬架系统如图2所示。为减小悬架安装误差,在上下横臂与车架相连的套筒内装有橡胶衬套。上下横臂另一端分别通过杆端关节12、10与转向节的C形槽3、11相连,杆端关节的球铰端用铰制孔螺栓固定于C形槽内。上下C形槽3、11分别通过两端的螺栓固定于转向节4上。在转向节另一端,装有电磁制动器8,用于产生汽车的制动力。电磁制动器8又与轮毂电机6通过一个连接件7进行连接,轮毂电机外圈(转子)用螺柱与轮毂总成5相连,内圈通过花键与转向节相连,并用圆螺母进行轴向固定,从而使轮毂电机内圈(定子)得到固定。

1.减震器 2.上横臂 3.上C形槽 4.转向节 5.车轮总成 6.轮毂电机 7.连接件 8.电磁制动器 9.转向节臂 10.下横臂杆端关节 11.下C形槽 12.上横臂杆端关节 13.下横臂
3 悬架导向机构仿真分析
本文主要分析当车轮上下震动时,悬架主销内倾角、主销后倾角、车轮外倾角的变化。
表1 双横臂独立悬架的设计参数

仿真分析前,首先对模型进行设置,设定汽车满载时下横臂与地面平行,分析车轮上下跳动±50mm时的各参数变化。所设计悬架参数如表1所示。
3.1 主销内倾角变化
主销内倾角可以使车轮转动时获得一定的回正力矩[3]。经过分析,主销内倾角随车轮跳动位移变化如图3所示,车轮[-50,+50]上下跳动时,主销内倾角变化大小约为1.2°,基本满足设计要求。

图3 主销内倾角随车轮上下跳动位移的变化曲线
3.2 主销后倾角变化
主销后倾角变化如图4所示。车轮跳动时,后倾角也跟着发生变化,变化角度约为0.0048°,在理想的变化区域内,因此满足设计要求。

图4 主销后倾角随车轮上下跳动的变化
3.3 车轮外倾角
车轮外倾角的大小也会影响汽车的操纵稳定性,车轮外倾角随车轮上下跳动产生变化会影响汽车直线行驶时的行驶稳定性、转向性能以及会使轮胎磨损等[4]。本设计中,当车轮跳动时,车轮外倾角变化如图5所示,外倾角变化大小在1.2°以内,满足设计要求。
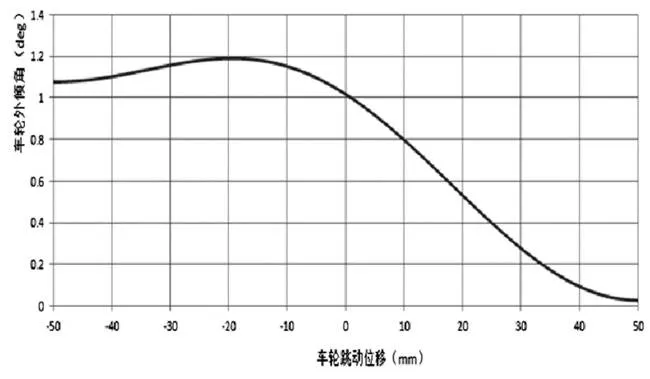
图5 车轮外倾角随车轮上下跳动位移的变化
4 总结
本文设计的四轮独立转向电动汽车可实现汽车[-36°,90°]大角度转向,提高汽车转向灵活性从而减小城市道路拥堵。提出一种新型齿轮齿条转向系,且为了避免运动干涉,设计出符合要求的直角三角形横臂结构。通过悬架定位参数的分析,验证此设计的合理性。
[1] 李校培.基于轮毂电机的空间节约型电动汽车全转向系统研究[D].西南交通大学, 2015.
[2] Kueperkoch S, Ahmed J, Kojić A, et al. Novel Vehicle Stability Control Using Steer-by-Wire and Independent Four Wheel Torque Distribution[C]// ASME 2003 International Mechanical Engineering Congress and Exposition. American Society of Mechanical Engin -eers, 2003:413-420.
[3] 戴逢权.多连杆悬架系统性能仿真研究[D].武汉理工大学,2011.
[4] 刘辉.空气悬架大客车的多体动力学仿真分析[D].长安大学, 2011.
Design of suspension and steering system for large angle steering electric vehicle
Feng Qianlong, Song Weiping, Nan Youfei, Ren Tianyuan
( Automobile Chang'an University, Shaanxi Xi’an 710064 )
In order to improve vehicle steering flexibility, reduce traffic congestion and improve parking space utilization, based on hub motor and wire control steering, an electric vehicle model which can realize large angle steering is proposed, which can achieve 90° angle steering, thus improving the steering sensitivity of the vehicle. The steering system and suspension are designed with SolidWorks software, and the rationality of suspension system design is analyzed.
steering large angle; steering system; suspension
B
1671-7988(2018)20-15-03
U469.72
B
1671-7988(2018)20-15-03
U469.72
冯乾隆,就读于长安大学,硕士研究生,主要研究方向为汽车电控技术。
10.16638/j.cnki.1671-7988.2018.20.005
猜你喜欢
农业装备与车辆工程(2022年2期)2022-10-30
汽车零部件(2022年9期)2022-09-30
汽车实用技术(2022年10期)2022-06-09
汽车实用技术(2022年5期)2022-04-02
汽车零部件(2022年3期)2022-03-29
汽车工程(2021年5期)2021-06-09
汽车实用技术(2021年3期)2021-02-24
汽车实用技术(2021年3期)2021-02-24
汽车实用技术(2020年8期)2020-07-09
汽车实用技术(2019年16期)2019-09-11
