
多波束测深技术在工程实际中的应用
2018-10-24 09:15巩维屏滕忠雪
东北水利水电 2018年10期
巩维屏,滕忠雪
(松辽委察尔森水库管理局,内蒙古乌兰浩特137400)
1 概况
察尔森水库泄洪洞是水库枢纽工程主要建筑物之一,水库建设期间其主要功能为施工导流,工程建成后主要承担泄洪、发电、灌溉、生态供水等任务,为圆形有压隧洞,泄洪洞全长392 m,洞径6.0 m,主要由进口建筑物、调压井、出口建筑物组成。进口设有沉砂池、拦污栅等设施,进口底高程336 m,水库蓄水后由于施工期对泄洪洞进口岸坡防护不到位,经常有岸坡浮石落入进口,特别是1998年大水期间,进口塌岸严重,大量塌滑物落入泄洪洞进口拦污栅前,致使拦污栅无法正常启闭,为了保证泄洪洞正常功能不受影响,1999—2002年期间对进口岸坡采用浆砌石进行了护砌,并对洞口淤积物进行了清理,由于当时条件限制未能从根本彻底清除洞口淤积物,在进行拦污栅检修时,落石进入拦污栅底,致使拦污栅无法回位,每到供水发电期都有部分石块进入洞内,严重威胁着水轮发电机组的安全,为保证泄洪洞功能正常发挥和发电机组安全,借察尔森水库除险加固工程施工机会对泄洪洞进口淤积物进行彻底清理。据水下成像探测估算淤积物体积约为300 m3(宽14 m,长25 m,堆积厚度为0.3~1.5 m)。2016年10月,利用察尔森水库库水位较低的有利条件,施工单位组织对进口淤积物进行了清理。
2 淤积物清理检测
为了检查清理效果,建设单位组织对泄洪洞进水口拦污栅附近清淤物清理效果进行定量检测,首次检测采用GNSS(RTK)配合单波束测深仪对该部位进行了全面水下测量,期间恰逢库区季风时节,水面风浪较大,测量船只较难控制,水下地形测量点的密度很难达到较密的程度,对水下地形测量的高程精度造成较大影响,测量数据与原设计图纸差别较大,测量成果不能直观、清晰地反映水下清淤的情况。鉴于单波束测深仪的局限性,经认真研究,决定采用国内先进的测深手段——多波速测深技术,对泄洪洞进口拦污栅及附近地形进行全面试验性扫测,从而获取进口附近水下障碍物信息。
多波束测深技术是利用发射换能器阵列向水下发射宽扇区覆盖的声波,利用接收换能器阵列对声波进行窄波束接收,通过发射、接收扇区指向的正交性形成对水下地形、地貌、障碍物的照射,探测水下被测点的水深值变化,可靠地描绘出水下地形的三维特征的先进测深技术。
2.1 扫测区域确定
根据进口建筑物布置形式,参考原有设计图纸和测量资料确定察尔森水库泄洪洞进口淤积物堆积范围扫测主要为一个测试区域,测区长约230 m,宽50~100 m。
2.2 测试设备
1)MS400多波束测深系统组成。
为准确获取水下淤积物信息,此次采用MS-400高频浅水多波束测深仪,该设备主要面向内河、港口、航道、海岸线等浅水领域应用,拥有便携式、高分辨率和高性能等方面的特点,可将操作人员的现场工作减少到最小。内置姿态仪,将声学基阵与姿态测量集成于一体,可免去用户测量时安装校准的繁琐过程,同时也兼容外部高精度姿态仪。工作过程中换能器发射与接收声波信号,通过换能器电缆将声呐单元(包含多波束信号处理单元,数据采集单元,数据通信控制单元)与换能器连接进行信号传输,经系统软件运行平台进行数据采集、数据后处理,利用设备内部集成的多波束外围设备卫星/惯性组合导航系统提供高精度GNSS定位,艏向和三维姿态补偿信息SVS1500表面声速仪实时提供换能器表面的声速,多波束外围设备SVP1500声速剖面仪提供测量区域声速剖面数据,进行多波束声线改正。
2)关键技术指标,见表1。
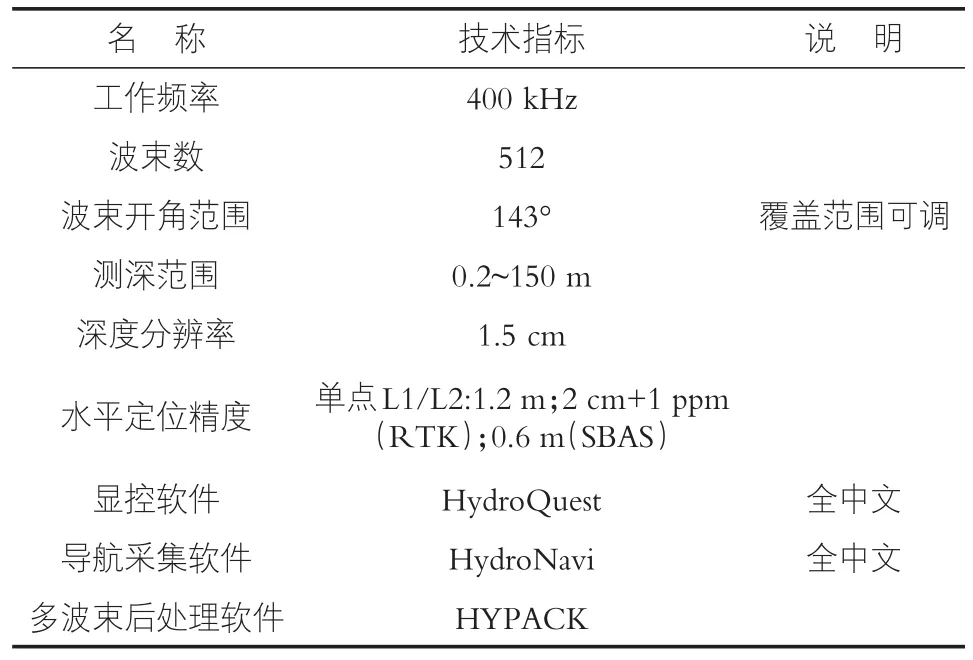
表1 技术指标统计表
3 多波束测深原理
多波束测深系统的工作原理是利用发射换能器阵列向水下发射宽扇区覆盖的声波,利用接收换能器阵列对声波进行窄波束接收,通过发射、接收扇区指向的正交性形成对水下地形的照射脚印,对这些脚印进行恰当的处理,一次探测就能给出与航向垂直的垂面内上百个甚至更多的水下被测点的水深值变化,比较可靠地描绘出水下地形的三维特征。与现场采集的导航定位及姿态数据相结合,绘制出高精度、高分辨率的数字成果图。
4 测量实施
4.1 设备安装
多波束测深系统换能器(内置GNSS惯导系统)采用舷侧悬挂安装方式,使用专门设计的安装支架将换能器稳固安装在测量船的右舷下方,换能器下底面低于船底面;两个GPS天线安装在与船龙骨线平行的位置;多波束测深系统的甲板单元、数据采集和导航计算机布设在船上合适位置。
4.2 测量航迹线
由于此次测量区域紧靠水库大坝泄洪洞进口,测量区域的面积小,并且测量水域有一部分被坝体包围,船体无法进入这一水域进行扫测,所以选择船体沿着大坝方向,保证测量设备安全的条件下进行测量,尽可能靠近被测区域。
4.3 数据采集
多波束测量过程中,船只沿着大坝行进,航速保持稳定,控制在2节左右。多波束测深系统配套的显控软件和导航软件运行在数据采集计算机上,完成设备工作控制、数据采集显示和测量导航功能。
使用多波束显控软件,可以控制多波束测深系统的工作状态及其工作参数。实时地显示出多波束水体图像数据和水下剖面数据结果。测量过程中,多波束测深系统采用了143°开角的覆盖扇面,最大覆盖宽度达到6倍水深。多波束采集导航软件完成数据采集记录、测量数据显示、多波束彩色地形实时显示、测量船航迹线和偏航提示等功能。导航软件实时显示出已测区域的深度分布和测量覆盖情况。
5 数据处理及成果
5.1 数据处理
外业数据采集完成后,使用多波束后处理软件Hypack进行数据处理。处理过程中Hypack软件中显示的每条线为多波束单次测量(每Ping)得到的海底地形剖线,图中显示出多波束连续40Ping测量的地形结果,可以看出测区地势情况,较好地呈现了地形形态。
现场实际测图呈现出坝体斜坡的地形特点,从某一视图角度可以看出水下地形为左高右低,呈斜坡状,深度变化明显,地形清晰显著。通过测量显示器明显的看出泄洪洞进口水下前方沉砂池部分地形,沉砂池边沿地形变化连接自然,池内凸起逼真,较好地反映出沉砂池地形形态,沉砂池结构形式与设计图纸一致。
5.2 测量成果
5.2.1 实测水下三维地形
数据处理完成后,生成测量区域的三维测量数据(XYZ数据)。使用多波束处理软件图功能模块,生成测量区域的三维地形图,通过地形图清晰地反映出泄洪洞进口建筑物结构和淤积物位置。
5.2.2 测量成果图
测量区域为10 m×10 m的方形水域,生成的三维地形图清晰地显示出大坝泄洪洞进口水下地形情况。从地形图中可以看出泄洪洞进口下方靠拦污栅左侧和右侧处有凸起的地形,左侧凸起面积约8 m2,右侧凸起约4 m2,平均堆积高度0.5 m。为了验证测量结果的准确性,测量结束后专门派潜水员进行有目标的水下探测,潜水员探测描述与多波束扫测结果基本一致,从而验证了多波束测量的准确性。
6 结语
通过先进的多波束水下测量技术的试验应用,更加准确地确定了察尔森水库泄洪洞进口淤积物具体情况,有效地缩短了水下测量时间,为水下测量提供工准备的清理范围和工程量,为清理泄洪进口水下淤积物清理提供了可靠的地形依据,从而保证清理质量,克服了以往水下测量由于环境影响、设备精度、测量方法等造成的误差,同时也通过工程实例验证了多波束技术的先进性和水下测量的准确性。
猜你喜欢
小水电(2022年5期)2022-10-17
水电站设计(2020年4期)2020-07-16
四川水力发电(2020年2期)2020-05-23
水电站设计(2018年1期)2018-04-12
声学与电子工程(2017年1期)2017-06-22
声学与电子工程(2017年1期)2017-06-22
水利科技与经济(2016年6期)2016-04-22
山东水利(2016年8期)2016-04-07
水电站设计(2015年3期)2015-12-10
雷达与对抗(2015年3期)2015-12-09
