国外舰载无人机着舰引导技术发展现状
2018-10-19 02:58张淑丽蒙文巩
无人系统技术 2018年2期
李 强,张淑丽,蒙文巩
(1.中国人民解放军海装舰船办航空系统处,北京 100071;2.中国船舶工业系统工程研究院五所,北京 100094)
1 引 言
无人机机动灵活、隐身性能好,可借助其上的侦察、干扰、通信等设备大大延伸舰船的作战范围。因此,相关国家都在大力推广舰载无人机。然而,由于受到海浪、舰船、无人机性能、舰上着舰区气流等因素的影响,舰载无人机起降极其复杂,如何引导其按要求的航迹飞行实现自动起降是舰载无人机的关键技术之一,也是各国发展舰载无人机需要考虑的重点之一。
目前,舰载无人机的回收着舰方式主要有撞网回收[1]、自动着舰[2,3]等方式。随着无人机执行作战任务能力要求的提高,无人机的质量也越来越大,撞网回收已无法满足中大型无人机的着舰需求。因此,自动着舰已成为无人机回收的重要方式。舰载无人机自动着舰引导技术发展比较成熟的国家有美国、法国、奥地利等,采用的技术手段主要有雷达、光电和卫星等。
雷达着舰引导是利用舰上安装的雷达,测量无人机的高度、方位、速度等参数,通过解算处理,产生与理想着舰轨迹的误差信息,并发送给无人机,控制无人机按预定轨迹下滑着舰。目前,采用雷达引导技术体制的无人机着舰引导系统主要有美国Sierra Nevada公司的无人机通用自动回收系统(UAV Common Automatic Recovery System,UCARS)[4,5]和法国DNCS公司开发的一种舰载无人机自动着舰系统D2AD。
光电着舰引导是以光电传感器为基础的着舰引导体制。由于光电具有分辨率高、抗电磁干扰、多径效应能力强、体积小、质量轻等一系列技术优势,这种技术一出现就引起世界各国的关注,并表现出良好的应用和发展前景。目前采用光电引导技术体制的无人机着舰引导系统主要是法国DNCS公司研制的SADA[6]自动甲板起降系统、美国DRS公司研制的进近着舰虚拟成像系统(Virtual Imaging System For Approach and Landing,VISUAL)[7]。
利用卫星信号作为引导手段,是舰载无人机自动起降技术的重要发展方向。20世纪90年代,全球卫星定位系统(Global Positioning System,GPS)技术逐渐发展成熟。作为一种卫星导航系统,GPS自建立以来给导航和定位技术带来了巨大改变,它从根本上解决了各类导航和定位问题。其接收设备简单,无需庞大的地面设备,又可全球覆盖。将GPS用于舰载机全自动着舰引导,可降低着舰系统对舰岛安装尺寸和母舰电磁辐射特性的需求;可发挥GPS精确测量相对位置的优势,有效提高导航和定位精度,特别适合近距离的相对定位。因此,GPS在舰载无人机自动着舰方面的应用得到了飞速发展。目前,采用卫星引导技术体制的无人机着舰引导系统主要有法国SIREHNA公司研制的自主着舰系统(Automatic Decking System,ADS)[8]、美国的联合精密进近着陆系统(Joint Precision Approach and Landing System,JPALS)[9,10]、奥地利S100型舰载无人机上使用的基于GPS自动着舰系统[10]。
2 美国着舰引导技术
舰载无人机已成为美国海军装备的重要组成部分,其正在研制的火力侦察兵代表了舰载无人机的发展方向之一。舰载无人机的广泛应用,促进了美国无人机自动着舰引导技术的发展,且其技术最为成熟,可采用的技术手段包括雷达、光电、卫星等。
2.1 UCARS无人机自动回收系统
UCARS是美国Sierra Nevada公司研制的一种雷达引导体制无人机自动起降系统,由舰载系统和机载系统两部分组成。其中舰载系统用于定位并精确跟踪无人机,提供无人机相对理想着舰点的相对位置。其雷达天线能够实现俯仰和方位两个方向上的跟踪,具有较大的运动范围,这样可以在高海况下保障无人机自动着舰。
舰载系统布置在飞行甲板上,或通过基座安装在船上,如图2所示。

图1 UCARS舰载系统
图2 UCARS在舰上的安装方式

图3 UCARS机载设备
机载系统主要部件为异频雷达收发机,如图3所示。
UCARS可在明朗天气、雾、雨、夜间和多数海况下实现无人机的起飞和回收;易与任意舰船和陆基无人机系统集成,可以应用到几乎所有的无人机;不需要外部额外的位置信息就能够满足甲板运动的稳定性要求,具有广泛的应用潜力。

图4 火力侦察兵舰载无人直升机
UCARS前后发展了UCARS-V1和UCARS-V2两个版本。UCARS-V2是为保障诺·格公司RQ-8A火力侦察兵无人机的自动着舰回收开发的。1996年9月开始,美国在马里兰州利用VC-6先锋无人机成功完成了UCARS的地面和飞行试验;1997年1月在Shreveport上完成了UCARS的海上试验。UCARS与先驱者无人机的集成始于1997年,与掠夺者无人机的集成始于1998年。之后,UCARS完成了岸上和海洋环境下的20000次自动着陆/着舰试验,包括在庞巴迪CL-227无人机上进行的8次自动起降试验。2006年1月,SNC宣称在Nashville号军舰上利用RQ-8A火力侦察兵完成了UCARS-V2的第一次自动着舰试验。
2.2 VISUAL进近着舰虚拟成像系统
为提高舰载机在复杂电磁环境、无线电静默条件下的使用率,美国提出了对光电着舰引导技术的军事需求。在此需求牵引下,20世纪80年代中后期,DRS公司为美国海军研制了VISUAL光电着舰引导设备。该设备利用人眼安全激光测距、双频红外辅助监视等技术,提供舰载机的着舰信息。VISUAL已广泛装备于美军现役航母上,还可在LHA/LHD两栖攻击舰上保障无人机着舰使用。
2.3 JPALS联合精密进近着陆系统
1996年5月,美国国防部提出基于卫星导航的联合精密进近着陆系统(JPALS)研制计划,以期实现三军联合、军民融合,雷神公司负责具体技术开发。美军对其使用的需求如下:
(1)可在现有军事基地进行精密进近着陆;
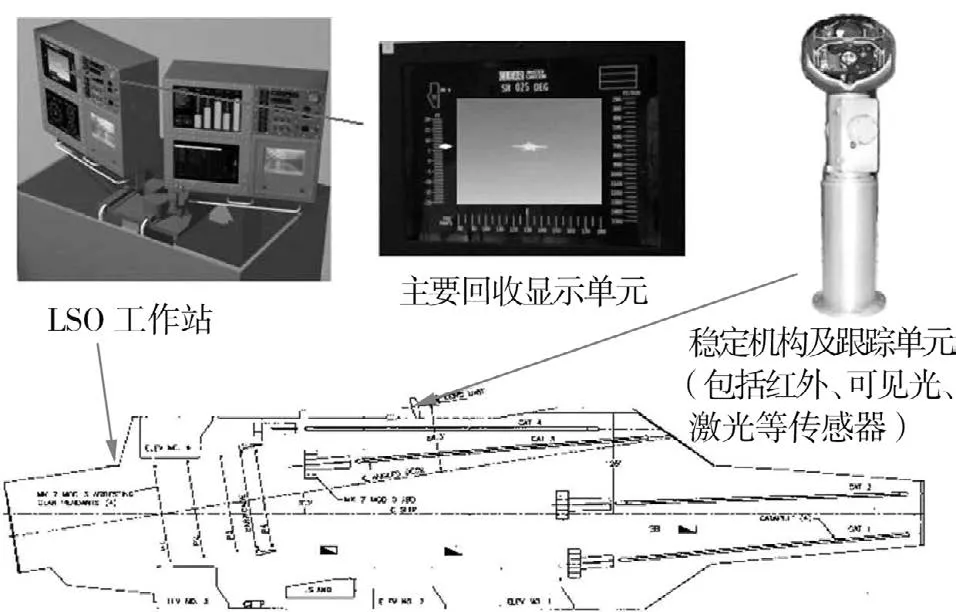
图5 美国VISUAL系统示意图
(2)可在简易机场快速部署,如伊拉克巴格达机场;
(3)可针对特殊军事任务,如精确兵力投送;
(4)可引导有人舰载机和无人舰载机自动着舰。

图6 JPALS任务需求
2013年,美国X-47B舰载无人验证机在JPALS支持下,完成了首次着舰回收。
美国原规划JPALS 2016年形成初始运行能力(IOC),并装备美军舰母、两栖攻击舰、濒海战斗舰等。但根据最新掌握的情况,目前JPALS仍在测试中,还没实现初始运行能力的目标。
3 法国着舰引导技术
法国在舰载无人机自动着舰技术方面的研究走在世界前列,技术手段包括光电、雷达和卫星等。
3.1 SADA自动甲板起降系统
SADA是法国DNCS公司开发的一种舰载无人机自动着舰系统。该系统使用红外传感器精确跟踪无人机,同时发出飞行指令调整航线直到确保无人机的“鱼叉”式着舰装置对准降落格栅的中心。
SADA能够在5级海况下,在移动的飞行甲板上保障无人机垂直起降,所需时间不到2分钟。SADA的跟踪精度为30cm,比仅使用GPS定位的系统精确很多,因此总的安全性和可靠性更有保障,从而克服目前无人机在海上进行舰船回收面临的技术难题,扩大了无人机的部署。同时,SADA具有开放式体系结构,能很容易地、不引起冲突地与任何垂直起降UAV和任意类型的舰船集成在一起。
2008年10月9日和10日,DCNS公司依靠SADA成功地使一架无人机以自动模式在一艘正在地中海航行的法国海军驱逐舰蒙特卡姆号(Montcalm)上完成降落。由于这项创新,DCNS能够向海军提供部署舰载无人机的综合解决方案,包括任务规划、发射、任务执行和回收。因此该部分可用于垂直起降无人机与海军舰船的使用集成。
3.2 D2AD无人机自动着舰系统
D2AD是法国DNCS公司开发的一种舰载无人机自动着舰系统,于2008年启动,致力于降低自动起降系统风险,且能够保证垂直起降无人机在舰上的安全使用。
D2AD包括机上和舰面两部分。机上部分是无人机的指引标,舰面部分在飞行甲板上使用传感器进行船体运动预报,是无人机的导航站,主要由雷达传感器、鱼叉系统、着舰管理操纵台、D2AD模拟器组成。D2AD不依赖任何卫星定位系统就能够实现无人机的自动着舰引导。
目前,法国武器装备采办总署及其工业合作伙伴DCNS公司和泰勒斯公司已经完成了D2AD真实海洋环境下30次成功起降试验,并在拉斐特级护卫舰上完成了海试,试验标志着D2AD项目的技术验证成果。

图7 D2AD舰面设备

图8 D2AD海上试验情况
3.3 ADS自主着舰系统
目前,SIREHNA公司完成了一个为期三年的垂直起降无人机自动着舰系统的演示验证项目。项目的主要目标是实现无人机在5级海况下的自主着舰。ADS自主着舰系统就是该项目的产物。
ADS由分别安装在舰上和机上的GPS/惯性导航组合导航系统提供连续并准确的舰机相对位置信息,通过数据链实现舰机的信息传输,从而实现对无人机的着舰引导。
SIREHNA公司已经完成数值仿真试验、甲板传感器试验、硬件闭环仿真试验、缩比物理仿真试验、全尺寸物理仿真试验。
4 奥地利着舰引导技术
奥地利在S100型舰载无人机上实现了依靠GPS自动起降。S100的地面/舰上控制设备主要包括控制站部分、数据链模块、支持设备(如可选的掩蔽部、发电机)及其它可选组件等,如图10所示。
当控制站处在一个固定位置时,GPS基准模块提供坐标信息使飞机导航更加精确,在移动操作期间,也能提供控制站的位置信息,从而确保系统的可用性。
5 发展趋势分析
着舰引导技术需要同时保障不同类型无人机的着舰使用。目前,舰载无人机由旋翼飞机向大型高速固定翼无人机发展,满足不同的作战使用需求。美国发展旋翼舰载无人机火力侦察兵,并同步开展X-47B舰载无人验证机项目,目前调整为MQ-25黄貂鱼舰载无人加油机项目,这对着舰引导技术提出了更高通用化的要求。基于卫星的着舰引导技术已应用于美国大型高速固定翼舰载无人机X-47B和奥地利旋翼舰载无人机的着舰回收。
多手段融合是舰载无人机着舰引导技术的发展方向。雷达、光电、卫星是舰载无人机着舰引导技术的三种主要手段,各有特点。雷达技术相对成熟,但在无线电干扰、静默情况下着舰引导使用受到限制;光电技术应用普遍,但环境要求较高,在低能见度下着舰引导使用效果不佳;卫星技术设备相对简单,但严重依赖天基卫星,信号完好性差,且容易受到干扰。为此,需要发展多种手段融合的着舰引导技术,形成技术体系,满足不同的使用环境要求。

图9 ADS功能及组成
多领域通用是舰载无人机着舰引导技术发展的重要途径。无人机在各领域的作用越发重要,如何形成通用的无人机优势以便快速部署,是当前无人机发展的关注点之一。为此,陆基与舰载无人机的通用化、快速衔接成为衡量其生命力的标准之一。与之对应的着舰引导技术也要求具有较强的通用化,以降低成本和技术难度。美国JPALS同时发展了陆基和舰基两个通用化版本。
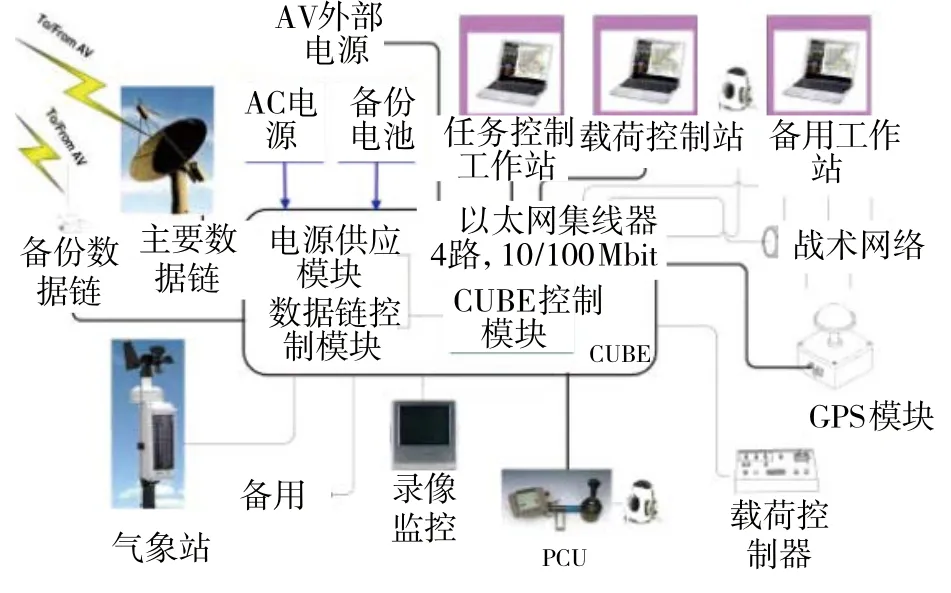
图10 S-100地面设备
6 结束语
随着科技、经济、政治的发展,舰载无人机在维护海洋主权、发展海上经济、反恐等领域的作用越发重要。与陆基无人机着陆不同,舰载无人机需要在狭小、运动的舰船环境下完成着舰。如何安全、可靠着舰回收是发展舰载无人机的关键技术,应重点予以突破。
美、法等国对舰载无人机着舰引导技术的研究相对深入,技术成熟,设备齐全,手段多样,代表了世界先进水平,对发展舰载无人机具有重要借鉴意义。
海陆通用、海空通用是舰载无人机着舰引导技术发展的重要方向,可同时满足多种无人机自动着舰、着陆使用需求。
猜你喜欢
军民两用技术与产品(2021年10期)2021-11-25
学生天地(2020年5期)2020-08-25
电子制作(2019年15期)2019-08-27
科学家(2019年3期)2019-08-18
小学生学习指导(低年级)(2018年12期)2018-12-29
小天使·一年级语数英综合(2017年3期)2017-04-25
莫愁(2017年9期)2017-04-07
汽车博览(2016年9期)2016-10-18
科学与财富(2016年28期)2016-10-14
火控雷达技术(2016年3期)2016-02-06