
城市交通问题的空中解决方案
——自主载人飞行器研究综述
2018-10-19 02:58:24吴陈炜谢安桓
无人系统技术 2018年2期
张 丹,吴陈炜,谢安桓
(1.之江实验室,杭州 311121;2.约克大学,多伦多 M3J1P3)
1 引言
自20世纪80年代以来,我国公共汽车快速发展、小汽车逐渐进入家庭;进入21世纪之后,随着城市面积和人口规模的迅速扩张,交通需求加速增长,以小汽车为代表的代步工具已然普及。尤其是在北京、上海等一批超(特)大城市、大城市,城市交通呈现高强度使用、高密度聚集态势。由于城市交通供需长期不均衡,交通拥堵、安全事故、环境污染等问题日渐凸显,社会大众议论广泛[1]。解决城市地面交通带来的诸多问题,是当前城市治理的重中之重。
自1903年莱特兄弟发明的第一架飞机试飞成功以来,人类的飞行梦与飞行探索从未止步。经过了100多年的发展,全球航空业已高度成熟,飞机已成为人类日常出行的交通工具之一,同时以多旋翼为代表的小型无人飞行器近年来也已经得到了广泛应用。面对城市不断发展所带来的交通拥堵问题,以及城市、山地、森林各类复杂环境的救援、特种任务执行等需求,常规民航客机、直升飞机等大型飞行器和各种地面交通工具已无法满足人们的出行需求,因此更为轻便、有效、安全的轻型载人飞行器备受人们期望。
美国国家航空航天局(NASA)提出了自由移动出行(On-Demand Mobility,ODM)战略框架,愿景“能够让任何人随时随地从一处飞向另一处”。报告指出,垂直起降(Vertical Takeoff and Landing,VTOL)轻型载人飞行器甚至被认为是未来城市内部出行的交通方式之一[2]。美国国防预先研究计划局(DARPA)则在报告中提出,自动驾驶、垂直起降飞行器(VTOL)发展的关键推动力。DARPA从安全和成本两个方面进行了分析,指出成熟的自动驾驶飞行器将免去飞行员繁琐的仪表操作,大幅减少飞行事故和死亡人数;将免去飞行员培训成本,并解决飞行员短缺的问题;自动驾驶让飞行器不受天气条件限制出行,在复杂的特殊环境下也能正常飞行[3]。
由此可见,对自主载人飞行器的研究具有重要的现实意义,本文将对该领域的研究现状进行系统综述,对国内外已有成果进行分类介绍,阐述该技术的整体架构与关键技术,针对城市交通问题提出空中出行的解决方案。
2 国内外研究现状
2.1 国外研究现状
目前国外对于自主驾驶载人飞行器的研究较多且相对较成熟,相关企业如空客、奥迪等都陆续推出过不同类型的自主载人飞行器,相关资料披露不同型号的飞行器约有几十种,其中比较典型的有:德国Volocopter公司的Volocopter 2x、ASTRO公司的AA360及COAR公司的Kitty Hawk Cora飞行器。
(1)德国Volocopter公司的Volocopter 2x
Volocopter 2x被誉为世界上第一台二座电动垂直起降无人驾驶飞机,通过机舱内置面板或移动客户端软件设置目的地,飞机就可实现自主飞行,2018年1月进行首次载人飞行。具体参数如表1所示。该机型配备一个弹道降落伞,如果出现任何问题,可确保安全着陆,获得了英特尔加速技术和戴姆勒股份公司的合作支持。

图1 Volocopter 2x机型
(2)ASTRO公司的AA360
AA360于2017年5月初开始飞行测试,历经几个月的密测试,最终在2017年8月完成第一次载人飞行试航。AA360作为电驱动垂直起降飞行器,可运送2名乘客,飞行过程中具有低噪音、零排放及低振动的特点。且具有自动补偿的控制策略,即使在恶劣的天气条件下,也能自主飞行。为了实现轻量化设计,在保证材料强度情况下,飞行器采用密度更小的碳纤维,摒弃传统的电缆转而使用轻质的光纤。

表1 各类型飞行器性能参数表

图2 AA360机型
(3)Kitty Hawk Cora飞行器
Kitty Hawk Cora飞行器是由一家获得谷歌(Google)创始人拉里·佩奇(Larry Page)投资的飞行汽车初创公司所设计,Kitty Hawk Cora采用旋翼垂直起降结合固定翼巡航的飞行方式,不需要跑道,并具备从屋顶等地方起飞的可能性。起飞时,通过旋翼旋转提供升力抬起飞机。在空中飞行时,大部分升力来源于机翼。Kitty Hawk Cora使用自动飞行软件,结合人的监管,使没有受过训练的普通乘客也能够自由飞行。

图3 Kitty Hawk Cora机型
2.2 国内研究现状
中国在自主载人飞行器的研究上,走在世界的前列,比较典型的是亿航智能、中航工业和吉利控股集团,都推出了各自的载人飞行器。
(1)亿航184
2016年国际消费类电子产品展览会上,亿航智能推出世界第一款真正意义上的载人无人机:亿航184,如图4所示。亿航184采用多套独立飞行控制系统来实现自动导航,飞行途中会实时采集分析来自各种传感器的数据,重新规划路径,从而保证将乘客以最快速、最安全的路径送达目的地。亿航184具体参数如表1所示,此外还有空调系统和阅读灯,配有支持全天候飞行的全自动飞控、全电动飞机,还有多个旋翼备份保障安全,可在1小时内完成充电,螺旋桨收起后,可停在汽车停车位上。

图4 亿航184飞行形态和折叠形态
(2)中航工业赛羚
2015年第三届天津直升机国际博览会上,中航工业推出了赛羚旋翼式汽车, 如图5所示。赛羚自重为100kg,由旋翼系统、动力臂系统、控制系统、行走系统、电气系统、车体等部分组成。旋翼系统可收放,展开时有六副旋翼,通过控制指令,产生纵向、横向以及航向的操纵力矩。动力臂系统用来联接旋翼系统与车体,可以伸缩,将旋翼系统的各种力传递到车体。控制系统用来控制飞行和地面行走的状态。行走系统包括车体的底盘、驱动等,可实现汽车的基本功能。电气系统仅包含直流电源系统,为整机提供直流电源。车体用来联接各个分系统,主要由车身的骨架、外壳构成。
(3)吉利Transition
2017年11月,吉利控股集团全资收购了美国的Terrafugia。2018年8月1号,吉利正式宣布,Terrafugia的飞行汽车Transition(如图6所示)于10月开启预定,首批正在量产,将于2019年问世。仅需要40s左右,Transition的机翼就能完全伸展,且只需要30m的跑道就能够飞上天空,基本上能够在任何一条宽敞的马路上起飞。机翼收起情况下,Transition可以轻松进入家用车库。

图5 赛羚飞行汽车

图6 Transition飞行形态和折叠形态
在安全性方面,Transition配备有安全气囊、预紧式安全带、碰撞溃缩区等一系列安全装置,还装备了降落伞。
3 基本原理与技术框架
3.1 飞行器的基本原理及分类
从飞行原理和结构看,目前可用于载人的飞行器主要分为:固定翼飞行器、多旋翼飞行器、直升机、涵道风扇飞行器及倾转旋翼飞行器等。这些类型的飞行器搭载上无人控制系统,可以在一定程度上改造成无人驾驶即自主载人飞行器。不同类型的飞行器各有优缺点,如表2所示。

表2 各类飞行器优缺点对比
3.2 自主载人飞行器技术框架
从系统组成来看,自主载人飞行器系统主要包括机体结构、动力能源、航电系统、地面控制等,如图7所示。机体结构作为飞行器的骨架,包括机身、机架和座椅等。动力能源包括动力系统和电源系统,其中动力系统包括电机、电调和旋翼等,是飞行器升力的来源;电源系统包括电池、电池管理系统和各种电源转换模块,为飞行器各模块提供能量,相当于飞行器的“心脏”;航电系统是飞行器的重要组成部分,主要包括飞控系统、通讯系统、人机交互等;飞控系统通过运算处理,实现对飞行器的控制,相当于飞行器的“驾驶员”;通讯系统是与地面进行通讯的媒介,包括数传和图传通讯;人机交互系统用于乘客对飞行器的互动。地面控制用于显示飞行器状态,方便地面人员对飞行器进行指挥和控制。
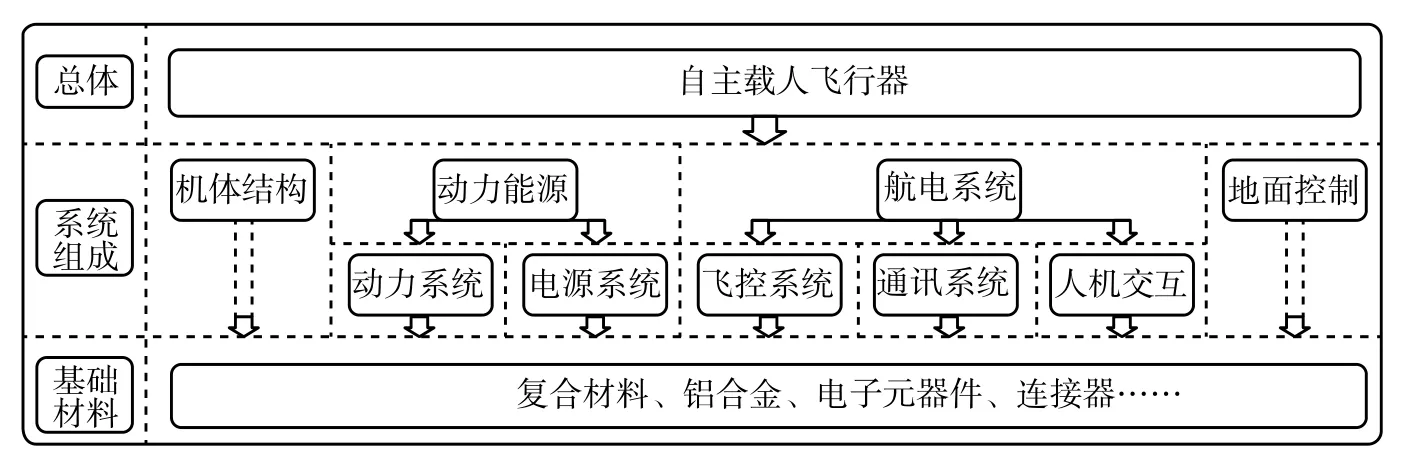
图7 自主载人飞行器整体组成框架
在操控方面,消费型多旋翼无人机基本都采用地面遥控设备对其进行实时遥控操作来完成目标飞行任务。与此不同的是,自主载人飞行器可摆脱对遥控操作的依赖,实现自动驾驶飞行,这主要依靠飞行器的飞控系统。自主载人飞行器的飞控系统可以根据任务自动生成合理的轨迹,并通过检测周围环境障碍物来实现自动避障,从而控制飞行器安全地飞行。同时因自动驾驶不需要飞行员驾驶,可避免人为误操作,从而可提高自主载人飞行器的安全性能。
与一般无人机的区别是,自主载人飞行器因为要载人,故需要重点关注安全技术;自主载人飞行器要广泛普及,首先需要保证飞行器安全性方面不差于汽车。自主飞行器设计上需要考虑安全因素,包括在硬件冗余、抗干扰、故障检测及处理等。同时自主载人飞行器也需要关注噪声方面,噪声不仅仅会引起地面上人们的反感,更会引起飞行器上人员的感受。因此需要研究降噪技术,以降低飞行器的噪声,保证在人们可接受的范围内。
4 关键技术分析
4.1 飞控系统
飞控系统是整个自主系统实现无人驾驶的核心,可以理解成自主载人飞行器的“驾驶员”,飞行器的姿态、位置、悬停、巡航飞行等控制都是依靠飞控系统来实现。飞控系统主要包括各种传感器(陀螺仪、加速度计、磁力计、GPS等)和机载计算机两大部分。各类传感器相当于飞控系统的“眼睛”,用于获取飞行器姿态角、位置、速度和高度等参数,是飞控系统的基础,其测量精度也决定了飞行器的控制精度。机载计算机是飞控系统的“大脑”,通过各类传感器获取飞行器姿态位置状态,进行运算处理,输出指令给动力系统来完成相应的姿态调整等控制动作。
飞控系统作为飞行器的核心部件,能自动完成飞行器起飞、按设定轨迹飞行、自动返航和自主降落等整个飞行过程的控制。飞控系统涉及的技术主要有:飞行器的导航技术、位姿控制、轨迹规划、自动避障等。
(1)导航技术

图8 自主载人飞行器的控制框图
获得高精度、高可靠性的飞行器速度、位置和姿态是实现多旋翼无人机自主飞行的首要条件。事实上,每一种传感器的性能都具有一定局限性,无法完全满足飞行器的导航要求。为了同时满足高精度、高稳定性、高实时性的要求,可以选择将多种传感器组合在一起,构成组合导航系统。组合导航系统实质上是一种多传感器组合导航系统,可以获得多种信息源,研究如何将这些冗余测量信息进行有机地信息融合,从而获得高精度、高可靠性、高鲁棒性、高实时性的导航信息,是目前组合导航系统研究的重点和关键技术问题。Fresk E等人[4]基于误差参数提出一种可以适用于任意无人机位姿估计的通用框架,利用拓展卡尔曼滤波的平方根公式来保证协方差矩阵的半正定性,通过增加计算的动态范围来解决小型嵌入式系统中的动态范围问题,同时整体计算量保持在一个较低的水平。Cordeiro T等人[5]提出了一种基于天线阵的姿态估计框架,通过ESPRIT算法获得一对天线所接收信号之间的相位差,这种估计称为视线矢量测量,并且结合到拓展卡尔曼滤波、四元素等姿态估计算法中,另外,他们还使用已知的扰动模型找到相移均方误差,来分析计算视线矢量的误差协方差矩阵。Wu J等人[6]提出了一种基于四元数的新型姿态估计器,它具有磁、角速率、重力传感器阵列,作者设计了一种固定增益互补滤波器进行多传感器数据融合,为了避免使用迭代算法,将基于加速度计的姿态解算转换为线性系统,基于以上,作者设计了一种将陀螺仪和加速度计融合,不需要迭代的互补滤波器。
(2)位姿控制
位置和姿态控制是飞控系统中最重要的控制功能,它是飞行器稳定飞行和完成各种复杂的飞行任务的基础,其控制效果也决定了轨迹跟踪精度和抗干扰性能。国内外研究者在这方面开展了大量的研究工作。目前多旋翼飞行器的位姿控制方法主要有PID控制、滑模控制、反步法、LQR控制等[7],其中PID控制因不依赖模型,且具有一定的鲁棒性,一般的开源飞控和消费级无人机产品采用的都是PID控制算法。
在此基础上,不少研究者开始结合现有控制方法来提高位姿控制性能。Chen F等人提出了一种结合滑模控制和反步控制技术的非线性控制器,提高了系统的鲁棒性[8]。Raffo G等人提出一种结合H∞控制和反步法的控制方法,利用H∞控制保证无人机姿态稳定控制,同时结合反演法实现对航迹跟踪控制[9]。Yacef F等人提出了一种利用自适应模糊控制来逼近未知的非线性反步的方法,该控制方法提高了轨迹跟踪性能和抗干扰能力[10]。
在飞行过程中,飞行器容易受到内外部综合干扰(如外部阵风影响),位姿控制效果也会受到影响,因此抗干扰飞行也成为了研究热点。Lyu X等人提出了一种基于扰动观测器的控制方法,可以提高在受风等外部干扰时的悬停精度[11];Wang C等人针对无人机负载变化和变阵风干扰问题,提出了一种自适应鲁棒控制器,可用于一直扰动和估计系统参数[12]。Zhang C等人提出了一种用于微型飞行器轨迹跟踪控制的自适应神经网络方法,可对不确定因素进行估计,从而提高系统抗干扰能力[13]。
(3)轨迹规划
与一般的消费级无人机不同,自主载人飞行器无需依赖地面实时遥操作,在确定好目的地后,可以进行合理的轨迹规划,然后自主飞行,这就要求飞控系统具有飞行轨迹在线实时规划能力。轨迹规划基本框架一般包含两部分内容,一部分是路径搜索,另一部分是轨迹拟合。由于无人机轨迹规划是在三维空间里进行的,相比于一般的平面机器人轨迹规划而言,更加复杂。
作为无人机自动驾驶的关键技术,轨迹规划是当前无人机研究领域内的另一热点。林鹏宏针对四轴飞行器多约束条件下的轨迹规划,结合使用基于 RRT 算法的路径搜索方法和基于模型预测的轨迹拟合法,仿真验证该方法的有效性[14]。Li M等人利用基于采样的RTT算法进行最优路径规划,来生成路径点序列,这种方法与林鹏宏方法类似[15]。Chen Y等人提出一种改进型中心力优化方法(MCFO),在路径规划过程中,利用粒子群算法和遗传算法对原中心力优化方法进行改进[16]。
(4)自主避障
避障系统是自主载人飞行器顺利完成飞行任务的重要安全保障,很大程度上反映了自主载人飞行器的智能水平与实际飞行安全性。避障系统是指在自主载人飞行器的飞行过程中不断监控物理环境,及时发现障碍物,根据对应的深度信息来规划飞行路径,飞行控制器根据飞行路径来实现避障,完成飞行任务。要实现避障,最关键的一步是通过传感器实时获取周边环境信息,而获取周围环境信息的传感器就目前而言可分为超声波传感器、红外传感器、激光传感器以及视觉传感器等。目前国际上研究机构和无人机公司,针对不同应用场景下的障碍物识别展开了深入的研究,主要分为主动式避障、被动式避障和复合式避障。
Ramasamy S等人[17]针对其在飞行器系统感知避障进行了深入研究,指出中小型飞行器由于经常在地面附近操作,并且由于驾驶员非常有限的观察和判别能力,进一步加剧了发生碰撞的可能性,他们提出了一种基于激光雷达的避障系统架构,该系统包括自动避障算法、人机界面交互、地面控制站。该系统为了实现导航信息和跟踪误差的实时处理,提出了解析模型。Sasongko R A等人[18]提出了一种避障算法,当发现飞行路径上存在障碍物,根据所识别的障碍物几何信息建立受限椭球区域,基于该椭球区域计算避障路径。随着自主载人飞行器的迅速发展,对障碍物识别的分辨率、精度、速度的要求也越来越高,同时对飞行器的动态响应性能要求也越来越高,更优的传感器、识别算法和飞行器动态性能是未来的研究热点。
4.2 通信链路
无人飞行器数据链,主要任务是将从飞行器上采集到的任务数据传送给地面站,并将地面站的遥操作指令返回给飞行器。如图9所示,数据链主要包括飞行数据与视频数据,它们的传输通过数传系统与图传系统完成。
数据链传输的关键技术包括调频技术、抗干扰技术和安全保密技术等。调频技术是将基带信号转换成传输信号,主要方式有调幅(ASK)、调频(FSK)和调相(PSK)[19]。目前无人飞行器主要采用线性的调制技术,如二相移相键控(BPSK)、四相移相键控(QPSK)和正交振幅调制(QAM)等。
抗干扰技术是为了降低数据链在传输过程中因远距离链路传输带来的损耗、遮挡物带来的信号衰落、飞行器高速移动带来的多普勒频移以及在复杂环境下的干扰和阻塞等问题,目前常采用通常抗干扰编码、直接序列扩频、软扩频技术、跳频、跳时和扩跳结合技术等方法[20]。
数据链的安全性极为重要,它涉及到数据泄露、数据欺骗和服务器攻击等严重问题。目前使用的数据链安全技术一般有两种模式:空-地安全模式和端对端安全模式[21]。空-地安全模式的优点是安全操作对操作机构而言是透明的,攻击者很难在空-地网络中获取路由信息并进行数据分析,但它在地-地网络中没有内在的信息安全保护,不能防止来自内部的攻击。端对端安全模式保障了从飞机到操作机构地面主机的整条链路,即空-地链路与地-地链路的安全,但它需要操作机构本身进行安全防护。
4.3 地面指挥中心
地面指挥中心是整个无人机系统的监控和指挥中心,主要任务是实现与无人飞行器的有效通讯,并在此基础上,实现对无人机的飞行状态进行监控,控制无人机的飞行状态[22]。基于这些要求,地面站通常包括显示模块和控制模块两大部分,显示模块包括:仪表显示模块,故障显示模块,跟踪显示模块以及航迹显示模块;控制模块可以实现无人机的航迹规划,设备自主起落,遇险自动返航以及设备悬停等功能[23]。国内外针对无人机的地面站,做出了很多研究[24]。亿航智能技术有限公司(EHANG)针对旗下的亿航184无人载人飞行器搭建了实施完备,功能全面的地面调度指挥中心。

图9 无人飞行器数据链示意图
为了更好地控制无人机,提升可靠性,无人机地面站在设计的过程中,往往需要考虑如下技术:抗干扰技术,无人机定位技术,信号快速捕获技术以及低仰角高速数据接受技术[25]。随着无人机技术的发展,地面站系统也从一站一机向一站多机方向转变[26]。即同时操控多架无人机,这样既提高了操作效率,也减少了人力成本。

图10 亿航184配套地面指挥中心
4.4 能源系统
飞行器的能源形式大致可以分为燃油、电池和油-电混合三大类。传统的内燃机,包括往复式发动机和涡轮发动机等,其效率仅为20%~30%,远低于电机系统。加上化石燃料的不可再生性,对环境的负面影响,以及在短途飞行中的经济效益劣势[27],“化石燃料+内燃机”的组合被其他更先进的能源方式取代也是大势所趋。广义上的电池,如锂电池、燃料电池、超级电容等,是燃油的理想替代者之一。尽管电池技术层出不穷,但是目前还远未达到可以完全替代的程度。另一个方案是油-电混合,结合燃油能量密度高和电能高效、环保的优势,用燃油发电驱动飞行器。
在电池技术中,应用最广的是锂电池技术。然而其发展却已经陷入困境,锂电池单体的能量密度不足1MJ/kg,远远达不到取代燃油的要求。而仅依靠更先进、更复杂的电芯制造技术,包括控制电池中活性颗粒的大小形态以及集电结构等,其能量密度无法再有大幅的提升[28]。锂电池技术需要更基础、更创新的理论突破。
相比之下,其他的新型能源,如氢能、可再生的生物燃料等,在应用广泛度、技术成熟度、经济成本、环境影响等方面相比于电池都不具备优势[29]。在可预见的未来,电池仍然是最有前景的能源形式。
4.5 安全保障
对于飞行器整体,需要进行状态健康监测与预测。可按阶段分为飞行前的健康检查、飞行中的健康监测、失效保护等方面。在传统的飞机等航空装备中,欧美等发达国家研发了直升机完好性与使用监测系统(Health and Usage Monitoring System,HUMS)、飞机故障预测和状态管理系统(Prognostics and Health Management System,PHM)、中央维护系统(CMS)[30]。通过健康监测与预测系统可以提升飞行器的任务可靠性和使用寿命。
随着无人机的快速发展[31],其所带来的安全威胁已经引起了人们和各个国家政府机构的关注[32,33],相应的无人机反制技术也在不断发展。在2016年的315晚会上,央视演示了黑客入侵一架DJI的精灵无人机并完全获取无人机控制权的过程。无人机反制技术分类举例如表3所示[34]。

表3 无人机反制技术分类
针对拦截和干扰,无人机的应对策略举例如表4所示。

表4 无人机干扰应对策略
载人方面,目前能大大提升挽救生命概率的方式是加装整机降落伞[35]。最著名的整机降落伞公司是BRS,其产品如图11所示,在各种飞行事故中已经成功挽救了300多生命[36]。

图11 BRS整机降落伞[37]
5 其他相关技术
5.1 降噪技术
随着无人机的广泛运用, 无人机噪声问题越来越受到人们的关注,无人机在飞行时,尤其是起降过程中常常产生强烈的噪声。以旋翼无人机为例,噪声来源主要是旋翼噪声和电机噪声。
南京航空航天大学宋辰瑶[38]基于声学时域公式建立了旋翼旋转噪声计算的方法和模型,实现悬停和前飞状态下旋翼厚度噪声和载荷噪声的计算,分析了桨叶片数、旋翼转速、旋翼直径、前飞速度等不同参数对旋翼噪声的影响。无刷直流电机驱动系统产生振动和噪声的因素很多,其中换向电流的急剧变化是引起电机振动和噪声的主要原因之一。Jiao G[39]提出了一种正弦波代替方波驱动的无刷永磁直流电动机,使输出的电流波形为正弦波,有效抑制换向电流的突变,降低了运行噪声。 该项技术在大疆无人机上得到了应用,使飞行噪声降低了4dB。
为了让无人机飞行时能够减少噪音,亚马逊基于仿生学原理,参照飞鸟翅膀和毛状植物,在螺旋桨边缘增加了锯齿状设计,并且根据类比思想,参照高尔夫球和潜艇螺旋桨,在螺旋桨表面增加了凸起设计,改变表面形态,起到了降噪的效果。
5.2 人机交互

图12 亚马逊无人机螺旋桨降噪方案设计
人机交互系统是指飞行器内部,乘客与飞行器及乘客与地面控制中心之间交互的平台,其主要任务有三个:一是显示飞行器的飞行状态,二是对飞行器进行有限的控制,三是实现与地面控制中心之间的视频通讯。人机交互系统和地面站系统的功能十分类似,但是又有明显的区别:在显示功能方面,人机交互系统上显示的飞行状态参数是精简的,只显示乘客可能关心的参数,例如航速、高度等,对于一些专业的参数,只会在地面站系统上显示;在控制功能方面,人机交互系统只能对飞行器进行有限的控制,例如,只允许航迹规划、悬停、降落、返航等操作,不允许乘客随意控制飞行状态。基于以上需求,人机交互系统通常包括飞行器自身状态模块,飞行状态模块和视频通讯模块三大部分,飞行器自身状态包括飞行器结构展示图,灯组控制,温度控制等,主要展示和控制一些与飞行无关的功能;飞行状态模块包括飞行状态显示和飞行控制;视频通讯模块利用摄像头、麦克风和视频通讯软件实现多方视频通话。

图13 人机交互系统
5.3 测试系统
为保证飞行器,尤其是自主载人飞行器稳定可靠地完成飞行任务,对系统各部分进行功能及性能测试是飞行器在研发阶段与飞行前后必不可少的环节。如图14所示,飞行器测试一般包含两部分内容:航电系统检测以及综合性能测试。

图14 飞行器测试系统的一般组成
航电系统检测主要涵盖单板级、单元级以及系统级的检测[40]。其中,系统级检测对各部分元器件的电信号、参数及兼容性等进行测试,是航电系统检测中最关键的部分。该技术目前已发展到第三代模块化自动测试系统[41],即依靠测试总线技术实现模块化的测试仪器方案,同步结合虚拟仪器技术自动完成测试任务。综合性能测试对象主要包括动力系统、感知系统、机体结构和飞行状态等方面,目前已发展到数值仿真、半物理仿真与实物测试相结合的方式[42-44]。
相较以往,目前的测试技术已能大幅降低研发周期与成本,但仍存在诸多问题:测试系统的开发成本依旧高昂、通用性不足并且缺乏统一的规范标准[45]。因此,如何更加经济、快速、安全、有效地完成测试任务,是未来测试技术的发展方向。
6 未来展望
1886年,“汽车之父”卡尔·本茨发明了世界上第一辆汽车——奔驰1号,汽车从当时18km/h的速度跑到现在,已经诞生了百公里加速度只需要3s的超级跑车以及“特斯拉”为代表的无人驾驶汽车,成为了当今世界最主要的交通工具。纵观整个汽车发展史,先后经历了追求功能与性能的起步阶段、追求安全与稳定的发展阶段、追求舒适与个性的成熟阶段和追求智能与环保的繁荣阶段。
按照汽车发展的历史,我们有理由相信,未来载人飞行器也将一步一步攻克性能、安全、续航、能效、环保等诸多技术壁垒,达到随时随地稳定地定制化出行(On Demand Mobility)要求。伴随着人工智能和网络信息技术的发展,未来的载人飞行器也必将朝着数字化、自动化、智能化的方向演进。
历史的经验告诉我们,技术的革命必将带动政策的革新。在民用航空器领域,适航政策是整个产业关键的一环。目前我国已经成为了世界上最大的无人机生产国,民航局等部门相继出台了一系列关于无人机管理、规范、应用等方面的法律法规和通知公告旨在规范无人机市场秩序的政策与文件。据统计,仅从2017年到2018年8月,我国出台的关于无人机方面的政策已有17条之多。这也体现了我国对于无人机产业有序、持续发展的重视与支持。一方面,民用适航政策需要通过对民用航空器设计、制造、使用和维修等环节进行科学统一的审查、鉴定、监督和管理,保障民机的安全稳定;另一方面,当今快速发展的无人机技术需要更灵活的适航政策来推动行业的快速发展。比如在无人机科研领域,需要出台专项政策,为研究人员提供试验空间和适航授权,这也将鼓励更多力量投入到无人飞行器的研究当中,促进整个城市空中交通产业的蓬勃发展。
我们可以构想这样一幅面向未来的美好蓝图:未来城市上空不同高度、不同轨迹上会出现无数无人驾驶的飞行器,载着乘客高速前往目的地,乘客可以按需定制出行,并且在机舱中享受各种服务。城市楼宇等建筑物顶部,会出现大量自动泊机位和充电桩,城市空中交通生态建成,人类的出行方式迈入“飞行时代”,社会生活方式将再一次发生变革。
猜你喜欢
少儿科学周刊·少年版(2022年19期)2022-05-30 10:48:04
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
电子制作(2019年9期)2019-05-30 09:41:48
电子制作(2018年2期)2018-04-18 07:13:25
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
太空探索(2016年12期)2016-07-18 11:13:43
太空探索(2016年9期)2016-07-12 10:00:02
太空探索(2016年6期)2016-07-10 12:09:06
