舰艇声速梯度仪检测校准装置设计与实现
2018-10-17 00:55盛成明唐锁夫
中国修船 2018年5期
盛成明,席 伟,唐锁夫
(702厂, 上海 200434)
舰艇声速梯度仪是用来测量水介质中声波传播速度的一种仪器。在海水中,声速是随着温度、盐度和静压力的变化而变化的,测量不同海区、不同深度的声速,可为声呐提供声速值和声速—深度分布曲线,用来修正其作用距离。一旦声速梯度仪出现较大的测量误差,将对水下航行安全尤其是水下状况复杂的情况下的目标判断产生严重影响[1]。因此舰艇出航前及仪器修理后,都需要对声速梯度仪进行检测校准。
由于缺乏专用检测校准装置,温度、盐度控制均采用人工调节,现场实施费时费力,而且检测校准过程中存在较大的误差,无法满足实际需求。因此对现有的检测校准方法加以改进和优化,利用成熟技术研制一套检测校准装置,不但解决了目前检测校准过程中存的难题,而且可以提高对仪器的维修保障能力,满足设备日常使用的需求。
1 声速计算方法
检测校准装置设计思路是采用测量声速梯度仪换能器的工作环境参数(温度、盐度、压力),经数学模型计算处理的方法,得出不同环境条件下的声速值,作为声速梯度仪的校准依据。
为此需确定声速的计算方法。声速计算公式如公式(1)所示[2],计算方法给出了声速与温度、压强和盐度的关系式:
c(S,T,P)=Cw+AS+BS1.5+DS2,
(1)
式中:c为声速,m/s;T为海水温度,℃;P为海水压强,MPa;S为海水盐度,‰,Cw、A、B和D是温度和压强的函数,如公式(2)、(3)、(4)、(5)所示。
Cw=P1C1T1,
(2)
A=P1A1T2,
(3)
B=P2B1T3,
(4)
D=P2D1,
(5)
式中:C1、A1、B1和D1均为已知的系数矩阵,变量矩阵P1、P2、T1、T2和T3分别如下:
P1=(1PP2P3)、P2=(1P),T1=(1TT2T3T4T5)T、T2=(1TT2T3T4)T、T3=(1T)T。
关系式的适用范围:0 ‰≤S≤40‰;0 ℃≤T≤40 ℃;0 MPa≤P≤101.325 MPa。
从声速计算公式可知,在海水中,声速的大小主要受到海水的温度、盐度和深度(压强)等因素的影响。根据研究发现,海水中的声速值一般在1 400~1 550 m/s,采用此计算方法获得的声速值能很好的稳定在1 500 m/s 附近,获得的声速值始终包含于参考范围之内,与实际变化趋势相符合[3],而且随着深度(压强)的增大声速基本保持不变,也就是说深度对于声速的影响不显著。因此,在实际计算中将不考虑深度(压强)影响,而根据实际需要作为定值处理或者忽略不计[4]。
2 检测校准装置组成
本装置主要由检测校准分机和显示控制分机两部分组成[5],其实现框图如图1所示。
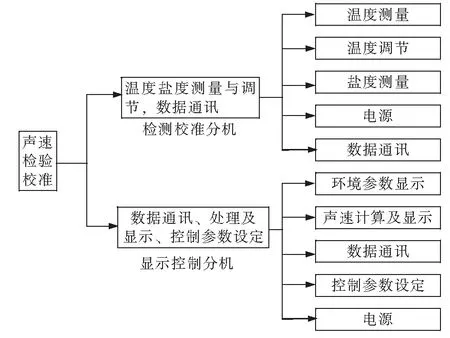
图1 检测校准装置实现框图
检测校准分机实现声速梯度仪换能器的工作环境参数温度、盐度的测量与调节、相关数据采集及数据通讯,显示控制分机实现数据通讯、数据处理、控制参数设定及显示。
2.1 检测校准分机
检测校准分机原理框图如图2所示,实现温度测量与调节、盐度测量、电源、数据通讯等功能。
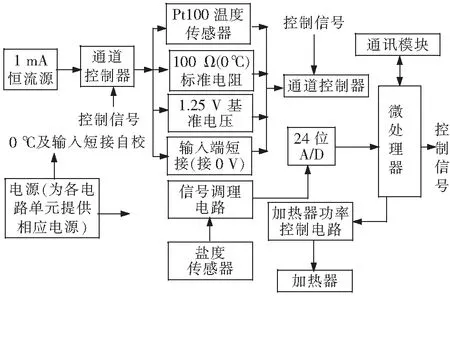
图2 检测校准分机原理框图
1) 温度测量。温度传感器采用铂电阻传感器。铂电阻传感器是传感器中最稳定的一种,其线性度非常好。为克服温度传感器导线电阻对测量精度的影响,采用4线制A级Pt100传感器。传感器标称精度0.15 ℃,可通过传感器筛选及分段校准方法实现0.1 ℃精度。传感器采用恒流激励,为不使传感器自身发热引起测量误差,采用1 mA恒流源。
当被测介质温度发生变化时,Pt100温度传感器电阻阻值发生相应线性变化,通过通道控制器,高精度A/D变换器检测到相应输入电压的变化,转化成数字信号传输到微处理器。微处理器按一定算法计算出被测介质的温度。同时,温度测量单元能实现自动/手动校准及检测功能。
检测校准分机通电后,自动执行校准检测程序对模拟信号通道进行校准和对测温程序运行进行检验。校准程序控制通道控制器,切换输入端短接及1.25 V高精度基准到测量回路,用以校准模数转换信号通道的误差。通道控制器切换100 Ω标准电阻代替Pt100温度传感器接入温度测量线路实现两个方面的检验。一方面检测1 mA恒流源是否准确,及具体数值为多少,用以温度转换程序的计算使用。另一方面可以直接显示标准0 ℃的温度值及给定盐度下声速值,用以判断程序运行是否正常。
2) 温度调节。微处理器根据设定温度及温度传感器检测到的温度,使用PID温度控制算法,输出温度控制信号至加热器功率控制电路,控制加热器工作,以实现温度控制。
3)盐度测量。使用盐度传感器对被测介质进行检测。当盐度传感器检测到被测介质盐度发生变化,转换出对应盐度值的4~20 mA输出信号,输出信号经信号调理电路处理后,经由通道控制器送A/D变换器进行模拟数字转换,转换后数字信号送微处理器进行盐度值的计算、处理。
4)电源。电源单元使用通用输入电压、隔离、稳压输出、小体积AC-DC模块电源。模块输出经LC滤波处理,为电路部分提供干净、可靠电源。输入电源经过压过流保护电路后,通过电源控制继电器为加热器供电。
5)数据通讯。检测校准分机接收RS-485通讯总线传送来的显示控制分机发送的温度控制、温度、盐度测量等操作指令,并将温度、盐度等测量到的参数通过485通讯总线回传到显示控制分机。
微处理器接收经过电平转换电路处理的显示控制分机传送来的打包数据,解包后执行相应的操作,并将执行结果打包后通过电平转换电路传送到显示控制分机,实现双向通讯。
2.2 显示控制分机
显示控制分机原理示意图如图3如示,实现环境参数显示、声速计算及显示、数据通讯等功能。
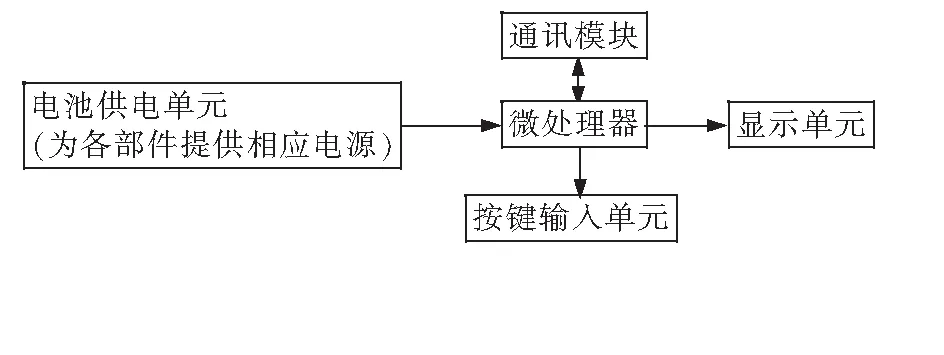
图3 显示控制分机原理示意图
1)环境参数显示。检测校准分机通过数据通讯功能把检测的温度、盐度等环境参数传送至显示控制分机,供运算处理使用。
微处理器通过传输模块接收的数据包解包后,经运算在液晶显示屏上显示相应温度、盐度数值。
2)声速计算显示。选用公式(1)计算公式,微处理器使用检测校准分机测量、传送来的温度、盐度环境参数,代入计算公式,计算声速值。将计算值显示在液晶显示屏上。
3)数据通讯。显示控制分机接收检测校准分机传送的温度、盐度等环境参数的信号。同时通过RS-485通讯总线向检测校准分机传送温度等控制参数。
微处理器将温度控制参数等数据打包后通过串行口发送至信号电平转换电路,将通讯信号传送至检测控制分机,同时接收检测控制分机传送的温度、盐度等环境参数,实现双向通讯。
4)控制参数设定。显示控制分机是整个校准装置的控制核心。通过显示控制分机执行测量、校准等操作,显示控制分机根据操作人员的操作指令,向检测校准分机发出相应控制指令。检测校准分机根据显示控制分机的控制指令执行操作,并将操作结果回传至显示控制分机,显示控制分机显示信息供操作人员分析处理。
5)电源。电源单元采用输入12 V直流电压,通过线性三端稳压单元输出5 V、500 mA为显示控制分机各单元提供工作电源。
3 结束语
本文提出的采用间接测量声速的方法研制的检测校准装置,为了保证其测量的精度,减小测量误差,采用了高精度4线制温度传感器,配合检测电路实现自校准调零,并且在程序中采用查表法实现非线性的校正,结合对其内部的温度场分析补偿,以实现温度的高精度测量,从而保证了声速值的测量精度,满足了设备检测校准的需要。检测校准装置实用性强、操作简单,经实际应用证明,设计方案合理,运行稳定可靠,能有效解决目前检测校准时费时、费力,检测效果较差的实际困难和存在的突出问题,对于保障装备的完好性具有重要意义。
猜你喜欢
航天返回与遥感(2020年6期)2021-01-13
科学与信息化(2021年6期)2021-01-04
黑龙江工业学院学报(综合版)(2020年5期)2020-07-29
海岸工程(2020年1期)2020-04-25
自动化学报(2019年12期)2020-01-19
电子制作(2019年7期)2019-04-25
电子制作(2018年23期)2018-12-26
电子制作(2017年16期)2018-01-30
中学生数理化·八年级物理人教版(2016年7期)2016-12-24
航空学报(2015年4期)2015-05-07