
基于AIS数据的海区通航危险度决策模型
2018-10-16 05:57李连博牛佳伟刘军坡刘德新
中国航海 2018年3期
李连博, 牛佳伟, 刘军坡, 刘德新
(大连海事大学 航海学院, 辽宁 大连 116026)
近年来,我国沿海水域通航环境日益复杂,船舶交通事故不断增多。海上通航安全评价研究由于观测水域位置和范围受限,大都针对沿海港口及航道水域,而对于开阔海区的通航安全评价研究较少;传统的通航安全评价研究方法中,船舶数据收集难度大、数据量小,且多考虑通航自然环境等要素,而对于能够充分体现海区通航安全的交通流特性指标考虑较少。借助船舶自动识别系统(Automatic Indetification System,AIS)等现代导航仪器提供的交通实态观测数据开展研究可弥补传统研究方法的不足。通过海量AIS数据的挖掘并筛选有效的海区通航安全评价指标进行评估,对于更好地保护我国沿海开阔水域船舶通航安全具有重要的意义。
1 AIS信息特点
国际海上人命安全公约(International Convention for the Safety of Life at Sea,SOLAS)公约规定,航行于国际航线的300总吨以上船舶和缔约国航行于国内航线500总吨以上的船舶,到2008年7月1日止,必须配备AIS船载设备,提供完善的船舶动态、静态等[1-5]相关信息。近年来,AIS信息数据挖掘已成为许多学者研究的热点,这些研究以AIS信息数据库中动态表及静态表为数据源,通过对数据库访问技术及计算机编程语言的研究,并结合电子海图系统的应用,实现了船舶密度、速度、航迹及会遇率[1-5]等数据的获取及数据分布的可视化,为人们对AIS信息的进一步研究提供借鉴。
2 海区通航安全影响因素分析
2.1 碰撞可能性
2.1.1船舶交通量
2.1.1.1 平均船舶交通量
平均船舶交通量是指在一段时间某一水域或航道通过的船舶数目的平均值,可分为年、月和日均船舶交通量等。平均船舶交通量越大,危险程度越高。
2.1.1.2 高峰交通量
高峰交通量是指在一段时间内单位时间内船舶交通量最大时段所对应的船舶交通量。仅考虑平均交通量来评价海区通航是不够安全的,易导致海区交通规模反映失真及危险度评估不准确。
2.1.2船舶密度及其分布
2.1.2.1 船舶密度
船舶密度是指单位面积水域某时刻的船舶数。当海区范围和船舶平均航速一定时,船舶交通拥挤度、危险程度和潜在的风险与船舶密度大小成正比。
2.1.2.2 船舶密度分布

(1)
2.1.3船舶速度
2.1.3.1 平均船舶速度
平均船舶速度是指某一水域或航道中所有通航船舶速度的平均值。在通常情况下,当某水域的船舶平均速度越大,船舶通航安全风险系数越高。
2.1.3.2 船舶速度分布离散度

(2)
2.1.4船舶间距
2.1.4.1 船舶瞬时间距
船舶瞬时间距反映某一时刻船舶间的距离分布情况。在海上,船舶驾驶员往往关注距离本船较近的一艘或几艘船舶,故在计算海区船舶瞬时间距过程中,只考虑距离本船最近的一艘船舶,每艘船舶有一个与其对应的距离他船最小值,取其平均值作为海区船舶瞬时间距,瞬时间距越小,通航安全程度越低。
2.1.4.2 船舶平均间距
船舶平均间距是指在一段时间内不同时刻船舶瞬时间距的平均值。船舶平均间距越小,海区船舶的通航安全系数越低,航行风险系数越高。
2.1.5船舶航迹分布
2.1.5.1 航迹重叠率
航迹重叠是指某海区在一段时间内船舶航迹相互重叠覆盖的情况。以某一交通流为例,一般情况下存在着正反两方向的船舶交通流,而实际中在这正反两个方向的交通流中间范围通常存在一定程度的重叠,航迹重叠率则是指中间航迹重叠部分的交通流宽度与该交通流宽度的比值。逆向的航迹重叠率越高,船舶发生会遇的概率较大。
2.1.5.2 航迹交汇区个数
航迹交汇是指在某一水域中船舶航迹相互交汇的情况。船舶航迹交汇区域也是事故的多发水域,一般主要用航迹交汇区的多少来反映某水域船舶通航交汇风险的危险程度,航迹交汇区越多,航行的风险就越大。
2.1.6会遇率
2.1.6.1 基于最小安全会遇距离的会遇率
会遇率即一个区域单位时间内的会遇次数,是最能体现船舶在海区船舶碰撞可能性的指标。通常会遇是指两船最小会遇距离(Distance to Closest Point of Approach,DCPA)和最小会遇时间(Time to Closest Point of Approach,TCPA)均小于一定值。考虑到AIS数据特点,基于DCPA精确统计会遇次数极其复杂,因此从最小安全距离(Distance to Safety Point of Approach,DSPA)角度出发,通过对海区的AIS信息进行数据挖掘,并设定一个关于DSPA的阈值[6](这里设为1 n mile),当两船间距小于该阈值时认为构成一次会遇,统计该海区单位时间内会遇次数来计算会遇率,会遇率越高,通航危险程度越大。
2.1.6.2 基于转向避让行动的会遇率
基于转向避让A/C(Alter/Course)的会遇率是指通过对船舶的航向信息进行跟踪,如其发生一定角度的转向后又恢复到原航向,并确定该转向是为了避让船舶而不是在航路转向点附近采取的转向行动,则认为构成一次会遇,统计该海区单位时间内总的会遇次数计算会遇率,会遇率越高,通航危险程度越大。
2.2 潜在风险
船舶因素和海上交通事故情况是潜在风险的最为主要的因素,考虑到无法从AIS信息中挖掘海区交通事故情况,因而主要从船舶因素即船舶种类和船舶尺度两个角度来分析。以油船、液化品船和客船在所有船舶中所占的比例为指标对海区的通航安全进行评价,比例越大,通航的潜在风险越高。在一般情况下,船舶尺度越大,受航道水深、宽度和自然条件(风、流)等因素的影响越大,操纵越不便[7-8],选取大型船舶所占百分比作为船舶尺度量化标准,比例越大,潜在风险越大。
3 海区通航危险度决策模型
3.1 多层次多目标高风险海区模糊优选模型
设系统由n个可供选择的方案组成决策集
D={d1,d2,…,dn}
(3)
第1层有t个并列的单元系统,其中第k个单元系统有m个目标组成对决策集D的评价集,决策j的评价目标用向量表示为
1kXj={1kx1j,1kx2j,…1kxmj}
i=1,2,3,…,m;k=1,2,3,…,t
(4)
式(4)中:1kxij为第1层第k个单元系统决策j目标i的特征值。
对于第1层第k个单元系统n个决策的评价目标特征值矩阵为
(5)
利用目标相对优属度公式将目标特征值矩阵X变换得到目标相对优属度矩阵为
(6)
式(6)中:将矩阵X变换为矩阵R采用如下目标相对优属度公式[9-10]:
对于越大越优目标有
(7)
对于越小越优目标有
(8)
设决策j的m个指标的特征值分别具有不同的权重,权重向量为
(9)
采用文献[11]推导出的决策相对优属度(决策相对隶属度的最优值)模型为
(10)
可得第1层第k单元系统的相对优属度向量为
1kuj=(1ku1,1ku2,…,1kun)
(11)
式(10)中:p为距离参数,p=1时为海明距离,p=2时为欧氏距离。
通过式(10)计算第1层t个单元系统的相对优属度,得到高一层次(第2层)的决策相对优属度矩阵为
(12)
uj=(u1,u2,…,un)
(13)
指标权向量的计算为
(14)
3.2 高风险海区多目标评价层次结构
通过对海区通航安全评价因素进行分析,确定的综合评价层次结构见图1,其中:x1、x2、x3、x4、x5、x6、x9、x10、x11、x12、x13、x14指标均为越大越优指标;x7、x8指标为越小越优指标。
图1中:x1为平均船舶交通量,艘·小时百平方海里;x2为高峰小时交通量,艘·小时百平方海里;x3为船舶平均密度,艘/百平方海里;x4为密度分布离散度,艘/百平方海里;x5为船舶平均速度,kn;x6为船舶速度分布离散度,kn;x7为船舶瞬时间距,n mile;x8为船舶平均间距,n mile;x9为航迹重叠率,%;x10为航迹交汇区个数,个;x11为基于DSPA的会遇率,次·小时百平方海里;x12为基于转向避让行动的会遇率,次·小时百平方海里;x13为船舶种类,%;x14为船舶尺度,%。
4 高风险海区模糊优选模型模拟计算
4.1 目标海区及其评价指标特征值
通过对有关基于AIS信息的船舶交通实态观测数据挖掘算法深入研究,在Windows平台下利用微软的基础类库(Microsoft Foundation Classes, MFC)开发应用程序,设计开发基于AIS数据的船舶交通流特性统计平台,对一段时间海区的船舶交通实态数据进行统计。以成山头沿海开阔水域为例,按面积大小将其分为16个面积大致相同的海区,分别记为海区1至海区16,基于上述平台对各个海区的交通实况数据进行统计,得到各海区的评价指标特征值见表1,船舶交通流特性统计平台界面显示见图2。
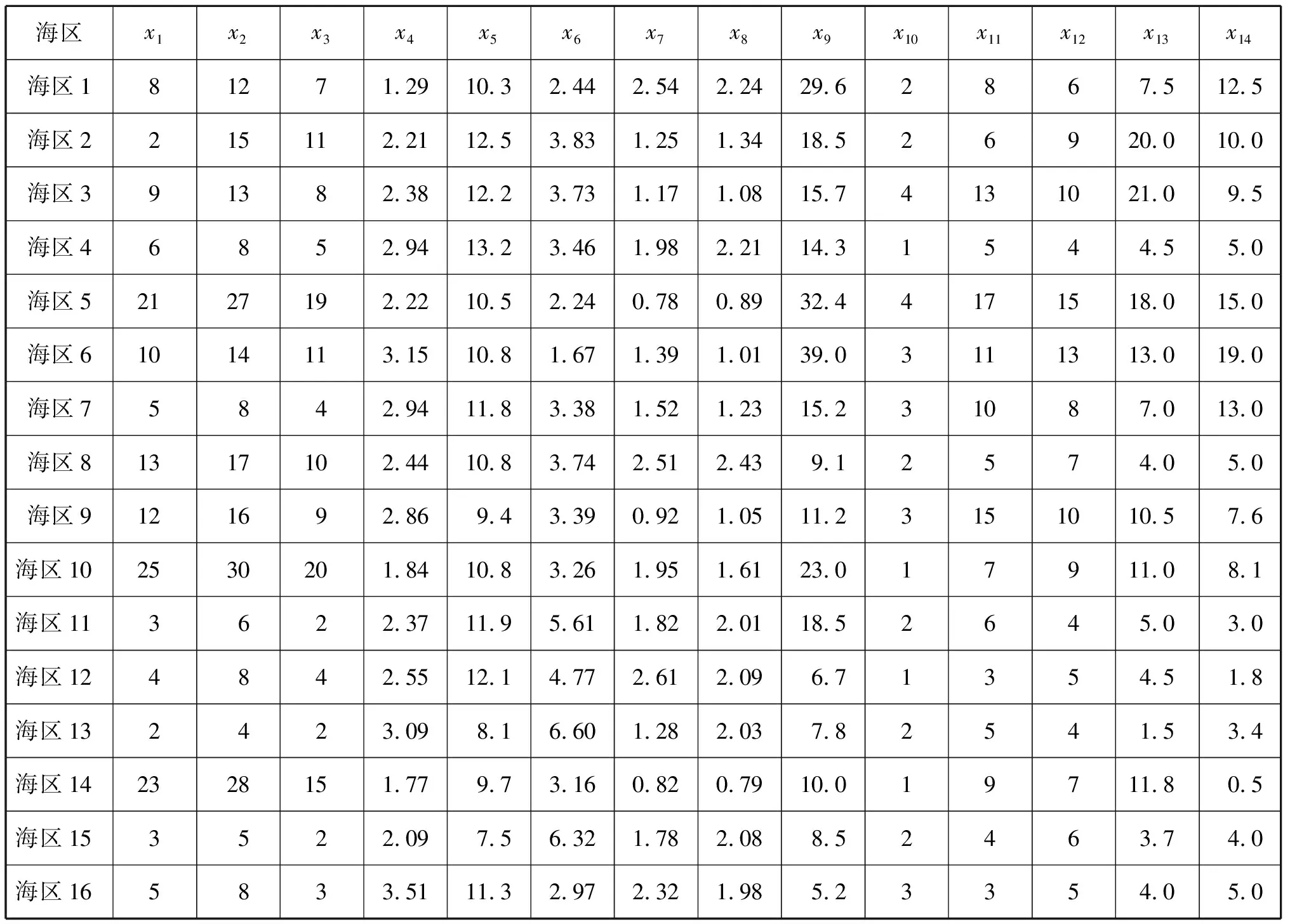
表1 基于AIS的海区交通实况原始数据
4.2 高风险海区模糊优选决策
根据表1中的数据可以得出目标海区的特征值矩阵1kX(k=1,2,3,4,5,6,7)为
根据前述对指标的分析,可知其中x7、x8为越小越优指标,其余均为越大越优指标。根据式(7)和式(8)可得到第1层的相对优属度矩阵1ku(k=1,2,3,4,5,6,7)为
根据式(14)计算得出第1层权重向量w1k(k=1,2,3,4,5,6,7)为
11w=(0.480 7,0.519 3)
12w=(0.420 7,0.579 3)
13w=(0.532 8,0.467 2)
14w=(0.507 4,0.492 6)
15w=(0.454 1,0.545 9)
16w=(0.497 2,0.502 8)
17w=(0.510 0,0.490 0)
根据式(10)得到第2层目标海区相对优属度矩阵为
同理,由式(14)得到第2层权重向量2w为
2w=(0.115 9,0.157 8,0.173 1,0.177 6,0.129 9,0.119 1,0.126 6)
重复利用式(10)求得多目标多层次海区通航危险相对隶属度向量为
uj=(0.143,0.564,0.680,0.182,0.844,0.702,
0.450,0.181,0.588,0.454,0.235,0.154,0.252,
0.493,0.150,0.174)
按照相对隶属度越大风险系数越高的原则可知,目标海区通航风险程度由高到低的排序为海区5、海区6、海区3、海区9、海区2、海区14、海区10、海区7、海区13、海区11、海区4、海区8、海区16、海区12、海区15、海区1。其中,海区5、海区6、海区3的危险程度较高,海区12、海区15、海区1的危险程度较低。
5 决策模型评价结果检验
5.1 海区交通实况验证
自2015年6月1日起,成山角水域实施新的分道通航制度,在原来分道通航定线制东侧新增外分道通航定线制,包括外分道通航和外警戒区。外分道通航部分由东、南和北分道通航及分隔带组成。海区11、海区12、海区15、海区16主要包括外分道通航的南分道通航;海区3、海区4、海区7、海区8主要包括外分道通航部分东、南和北分道通航及外警戒区;海区1、海区2、海区5、海区6主要包括内外两个警戒区和外分道通航北分道通航;海区9、海区10、海区13、海区14主要包括原分道通航的南分道通航。所有使用新分道通航定线制进出渤海湾的船舶都需经过海区5、海区6和部分海区2,并在内外警戒区交汇,船舶流量大、平均间距小、避让操纵频繁且会遇率高,故碰撞危险度高;使用新分道通航定线制航经海区3和海区7的船舶包括北上大连等港口、部分进出渤海湾、东往日韩和南下的船舶,该海域船舶流量和转向角度较大,操纵难度较高,船舶尺度偏大,故碰撞后潜在风险较高;海区9和海区13离岸距离近,尤其是海区9,渔船活动频繁,对航经船舶有一定影响,船舶间距较小致使碰撞风险增加。海区11和海区12中航行船舶虽然吨位较大,但无需转向,船舶交汇率低,故碰撞危险度低。利用基于AIS数据的船舶交通流特性统计平台统计成山头水域连续72 h航迹分布及船舶密度叠加情况,见图3。根据分布图直观观察,各海区交通实况与上述描述一致。通过以上对各海区交通实况的分析,可得各海区船舶通航危险度大小与模型计算结果相吻合,符合客观实际。
5.2 不同模型评价结果对比验证
为进一步从理论上对决策模型计算结果进行验证,选取安全评价中成熟的模糊综合评价模型,基于改进的层次分析法—模糊层次分析法确定各指标权重,结合专家咨询意见确定各指标的评价标准及建立相应的隶属度函数,分别对海区1~16号进行模糊层次综合评价,确定各海区的通航危险度。
5.2.1确定因素集
U={u1,u2,…,un}
(15)
将评价指标集定义为U={碰撞可能性u1,潜在风险u2},并有u1={交通量u11,船舶密度u12,…,会遇率u13},u2={船舶因素u21},u11={平均交通量u111,高峰交通量u112},…,u16={基于DSPA的会遇率u161,基于A/C的会遇率u162},u21={船舶尺度u211,船舶种类u212}。
5.2.2确定权重集
咨询专家意见,让专家对各层指标两两进行比较,进而得到模糊一致性判断矩阵M=(mij)n×n,然后计算各指标的权重为
(16)
式(16)中:wi为权重值;a为个人对元素差异程度认知的一种度量,通常取a=(n-1)/2。
利用模糊层次分析法处理调查问卷计算得到各指标的权重可得:
一级指标权重为
W=(0.7 0.3)
二级指标权重为
三级指标权重为
5.2.3确定评价集
定义评价等级V={v1,v2,v3,v4,v5},其中v1~v5分别代表的评价等级评语集为:低危险、较低危险、一般危险、较高危险及高危险,对应的模糊数分别为1,2,3,4,5。
通过参考以往学者的研究成果并结合专家咨询建议,各指标的危险度等级量化标准见表2。
5.2.4确定隶属度函数
本文基于模糊分布隶属度函数,采用偏小型、中间型和偏大型梯形模糊分布确定各指标隶属度函数。以平均交通量为例,其对应的隶属度函数,见图4。
5.2.5模糊综合评价
进行单因素评价,计算各指标相对各评语集的隶属度,得到单因素评判矩阵R(rij),结合多因素下的权重分配,采用加权平均型模糊算子,模糊综合评价决策模型为
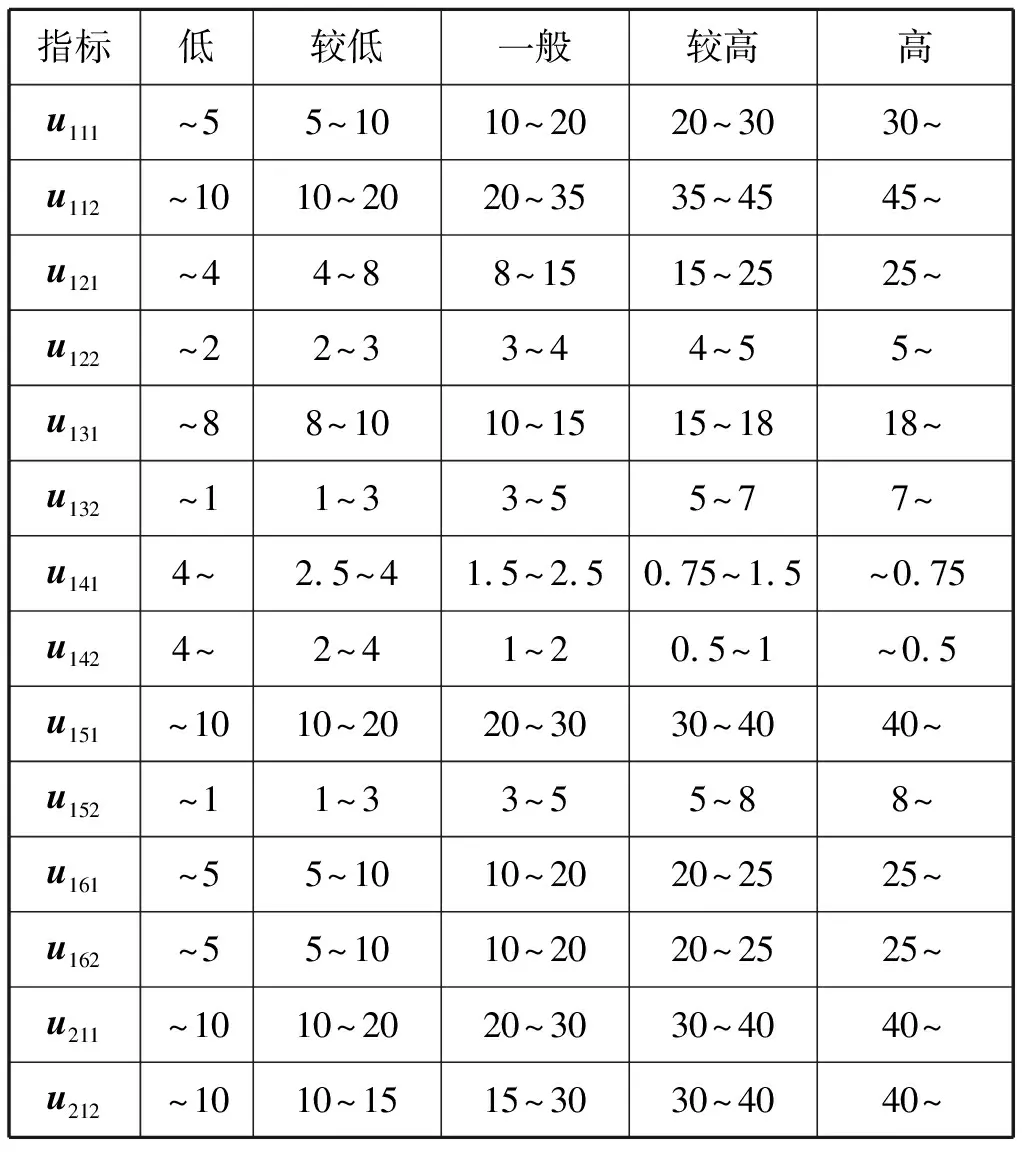
表2 危险度等级评价标准
(17)
通过计算,基于加权平均的海区1至海区16的模糊层次综合评价的结果依次为2.102,2.992,3.014,2.245,3.217,3.157,2.877,2.181,2.948,2.771,2.473,2.022,2.719,2.914,2.608,1.894。
根据以上评价结果,按照加权平均处理后的评价值越大危险度越高的原则,各海区通航危险度由高到低的排序依次为海区5、海区6、海区3、海区2、海区9、海区14、海区7、海区10、海区13、海区11、海区4、海区8、海区1、海区12、海区15、海区16。对比上文多目标多层次模糊优选决策模型计算结果海区5、海区6、海区3、海区9、海区2、海区14、海区10、海区7、海区13、海区11、海区4、海区8、海区16、海区12、海区15、海区1,可见两种模型决策结果大致相同,部分排序存在差异。分析其原因,主要是由于两种模型指标赋权方法不同造成的。模糊优选模型指标权重是客观的,而模糊综合评价指标权重是主观的,可能更侧重某一项指标,因此排序结果存在一定差异是正常的。但两种模型排序结果大致相同,说明模糊优选模型客观评价结果也符合人们主观上的认识,主客观相一致,进一步验证多目标多层次模糊优选决策模型的科学性和可行性。
6 结束语
本文以成山头沿海开阔水域为例进行计算,分别结合相关海区交通实况和模糊层次综合评价模型的评价结果来验证多层次多目标模糊优选模型的计算结果,可知该优选模型科学实用,决策结果合理可信,能够准确地确定不同海区之间的相对通航危险程度,为驾驶员在不同海域航行时进行航线设计提供指导,也可为沿海水域船舶定线制规划设计、搜救站点布局和搜救力量的配置等决策提供参考。
在利用目标绝对优属度模型进行决策时,往往难以确定目标特征值的上确界和下确界,因而造成很大的决策主观任意性。利用模糊优选模型计算目标相对优属度与决策相对优属度,可有效避免绝对优属度模型主观性过强的缺点[12-13]。此外,该模型物理含义明确,理论严密,计算简单,具有良好的适用性和可靠性,进一步丰富了模糊优选模型在航海上的应用。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
中国交通信息化(2022年4期)2022-06-17
运输经理世界(2021年20期)2021-05-19
北方交通(2021年3期)2021-03-31
雷达科学与技术(2020年4期)2020-09-11
北方交通(2019年8期)2019-09-09
中国篆刻·书画教育(2017年5期)2017-06-08
