基于无人机遥感的不同施氮水稻光谱与植被指数分析
2018-10-15 11:02:56裴信彪吴和龙严永峰
中国光学 2018年5期
裴信彪,吴和龙,马 萍,严永峰,彭 程,郝 亮*,白 越*
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春130033;2.中国科学院大学,北京 100039;3.吉林省农业科学院 水稻研究所,吉林 公主岭 136100)
1 引 言
水稻是我国最重要的主粮,氮素是水稻生长过程中最重要的营养元素之一,也是土壤中最活跃的元素之一[1-2]。水稻产量在一定范围内和氮肥施用量有直接关系,但过量施用氮肥会导致氮肥利用率降低,同时污染水体,造成土壤板结和硬化[3-5],因此,实现水稻营养状况的快速诊断,对水稻氮素含量进行监测以便合理施用氮肥具有重要意义。营养诊断的传统方法是采用实验室测试,准确性高,但时效性差,难以满足其在生产中的快速诊断需求[6-9]。随着遥感技术的发展,基于星载的光谱技术被用于农业、气象、国土勘察等众多领域中[10-12],成为诊断的一种方法。
Thenkabail等人[13]将TM影像与同期采集的地面实测数据相结合, 建立了玉米和大豆的叶面积指数估算模型,预测精度可达66%以上。Bunnik[14]利用遥感技术成功提取出植被覆盖度与叶面积指数。Walthall等人[15]利用ETM+影像反演了玉米和大豆的叶面积指数, 并对比分析了使用神经网络算法和经验模型在反演上的差异。虽然卫星遥感技术已经成功地应用于宏观农情监测中,并获得了较好的应用效果,提高了农业生产效益,但卫星遥感技术存在影像分辨率低、重访周期长等缺点[16],另外,基于卫星遥感的监测精度还会受到云层、大气和雨雪等环境一定程度的干扰,监测得到的数据往往与真实值有较大的偏差。随着无人机技术越来越成熟,无人机在农业很多领域成功地进行了实际应用。无人机平台使用灵活、遥感距离近、受环境影响小,能够实时快速地获取遥感数据[17],成为当前农业遥感应用的研究热点和前沿手段,可作为卫星遥感之外的新型测量方法[18]。当前利用无人机平台搭载光谱传感器进行农业遥感的相关工作还较少,本文使用共轴十二旋翼无人机搭载光谱仪构成农情遥感系统,测试不同施氮水平水稻的光谱指数变化规律,并使用广泛应用的比值植被指数(RVI)和归一化植被指数(NDVI)来分析不同氮素水平下水稻关键生育期内长势情况。RVI和NDVI均可以预测水稻叶片氮素含量及氮素积累量,且具有较高的准确性,且光谱参数对叶片氮素积累量的预测效果优于叶片氮含量。由于差值植被指数(DVI)对土壤背景的变化极为敏感,故本文采用RVI和NDVI来分析不同氮素水平下水稻关键生育期内长势情况,以期为作物长势分析、健康状况监测提供必要的数据支持,同时验证无人机搭载光谱遥感获取数据的有效性,为水稻氮素的合理施用提供更多理论指导。
2 高光谱遥感数据采集系统结构
2.1 飞行平台
试验使用的飞行平台为自主研发的六轴十二旋翼无人机,处于同一平面内的六个等长碳纤维机臂围绕中心点均匀分布构成机体平面;6组12个电机和旋翼构成驱动单元依次安装于机臂末端。电机轴向与机体平面夹角为ζ(0<ζ<20°),使得升力在偏航方向分量增大,显著增强偏航控制力矩,提升了系统风扰下的航向稳定性。飞行平台实物图如图1所示。

图1 六轴十二旋翼无人机 Fig.1 Twelve-Rotor UAV
飞行平台空载4.3 kg,最大带载10 kg,空载续航时间40 min,详细参数如表1所示。
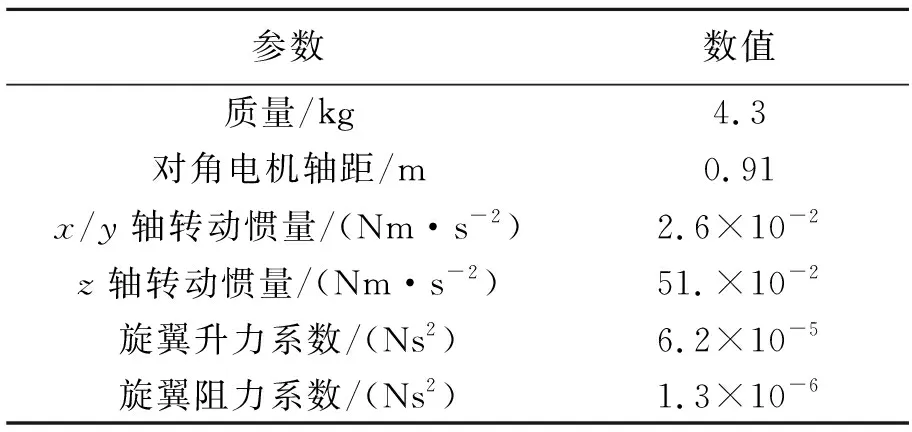
表1 六轴十二旋翼无人机参数Tab.1 Twelve-Rotor UAV parameters
2.2 飞行控制系统
飞行控制系统包括硬件模块和软件模块,其中硬件模块如图2所示。

图2 飞行控制硬件模块 Fig.2 Hardware module of flight control
其中,飞控主芯片采用STM32F429,实时处理用户发出的飞行航迹指令、遥感载荷工作指令,并回传飞行状态和遥感数据。同时主控制芯片与遥感载荷交互间,采用RS232-TTL遥感数据电平转换实现实时传输,并配备MicroSD卡进行存储。
软件模块中,核心是飞行控制方法的选择,无人机搭载遥感载荷进行数据采集时,需要良好的轨迹跟踪精度,为此采用一个基于双环嵌套结构的飞行器轨迹跟踪飞行控制系统,如图3所示。

图3 飞行控制轨迹跟踪方法 Fig.3 Trajectory tracking method for flight control
无人飞行器自主轨迹跟踪飞行控制闭环系统被设计为内、外环嵌套的结构。其中,在控制系统的外环设计一个基于ADRC算法的位置控制器,其作用为对比飞行器的位置信息以及期望轨迹信息,确定飞行器在各个方向上所需求的位置控制量,将位置控制量转化为期望的姿态角信号,并将其作为输入传送给内环的飞行器姿态控制系统。PD跟踪微分器环节,可以有效地平滑姿态角的期望信号,便于姿态跟踪算法的实现。内环采用PID算法保证飞行器的姿态实时跟踪,实现对期望轨迹的自主跟踪飞行。飞行控制参数如表2所示。

表2 飞行控制系统参数Tab.2 Parameters of flight control system
2.3 光谱遥感设备
光谱遥感设备选用美国ASD(Analytical Spectral Device)FieldSpec HandHeld便携式光谱仪,适用于从遥感测量、农作物监测、森林研究到工业照明测量、海洋学研究和矿物勘察的各方面应用。操作简单,软件包功能强大。此仪器可用来测量辐射、辐照度、CIE颜色、反射和透射。具体参数指标如表3所示。

表3 ASD FieldSpec光谱仪参数Tab.3 Parameters of ASD FieldSpec
光谱仪的使用条件范围广,可手持或固定在三脚架上,也可作为有效载荷挂载在无人机上。本文将光谱仪挂载在无人机机体正下方,对不同施氮量的水稻土地进行光谱测量,可实时测量原始数据、反射、透射、辐射和辐照度光谱曲线,其中ASD可测量的最大辐射值超过0°天顶角处100%反射白板辐射值的2倍。
2.4 数据采集系统
光谱遥感数据采集系统,要求能够实时传输位置信息和遥感信息,因此采用遥感载荷-飞行平台-无人机的传输方式,系统在这3个工作节点,都对采集的遥感数据进行了实时存储,实现多环节数据存储和备份,如图4所示。

图4 遥感数据采集系统 Fig.4 Acquisition system of remote sensing data
采集的遥感数据,ASD光谱仪本地进行存储备份,同时回传至飞行平台。平台对数据进行校验和板载SD卡存储。在飞行平台与地面站的实时通信中,将遥感数据和位置信息组合成数据包,经900M无线数传模块上传至地面站窗口显示并保存。系统在地面站、飞行平台、遥感载荷3个环节都进行了数据备份。飞行平台备份遥感载荷数据会产生极少量数据误码,地面站备份时由于无线传输会产生微量误码。然而多环节的备份可为试验自由选择数据源提供方便,选择地面站数据时可以直接通过窗口观测遥感数据,使用飞行平台SD卡的遥感数据,可以在试验结束后详细分析多项参数。
3 试验结果与分析
试验地点位于吉林省公主岭市水稻研究所试验田(124°44′ E,43°28′ N),该地区为平原地区,土壤类型为水稻土。设计4个施氮水平试验区域,分别为不施氮区(N1)、施氮量50 kg /hm2(N2)、施氮量100 kg /hm2(N3)和施氮量200 kg /hm2(N4)4个区域。
选择天气条件良好、晴朗无风的上午9∶00-10∶30,分别在水稻分蘖期、拔节期和抽穗期测定水稻冠层光谱反射率。试验测试时多旋翼无人机遥感系统距离测试区上空10 m并保持静止,光谱仪视场通过三轴稳定云台保持垂直向下,每个测量区域在不同位置均进行5次测量,每次测量开始和结束都对采集位置的光谱进行白板校正,以5次试验测量点平均作为该区域光谱反射值。试验时的数据源选择飞行平台存储的遥感数据,试验场景如图5所示。

图5 旋翼无人机遥感系统 Fig.5 Remote sensing system of multirotor UAV
3.1 水稻冠层反射光谱特性

图6 不同时期、不同区域、不同氮素含量的水稻冠层反射光谱 Fig.6 Canopy reflectance spectra in different time and at different nitrogen levels
图6中a、b、c分别为分蘖期、拔节期、抽穗期不同氮素水平下水稻冠层光谱反射率曲线。由图6可以看出,水稻冠层光谱反射率在分蘖期、拔节期和抽穗期随氮素水平呈现一定的规律性:即在可见光区水稻冠层反射率随氮素水平增加呈减小趋势,其中区域N1最高,区域N4最低;在近红外区,光谱反射率一开始随氮素水平增加而增大,但氮素水平增大到一定程度后再增加氮素导致反射率降低,近红外区光谱反射率顺序为N3>N4>N2>N1。同时高氮素水平下,水稻冠层在近红外区的反射率较高,在可见光区的反射率较低,主要是由于高氮素水平对应着较高的叶绿素含量,而叶绿素在可见光区蓝、红光具有强烈吸收特性而在近红外区具有高度的反射、散射特性,叶绿素在可见区形成了一个可见光区的小反射峰,能看到对红光与蓝光波段的强吸收,使绿色波段的反射渐近突出。另外,近红外区的光谱反射率N3>N4表明,当施氮水平超过一定量时,过高的氮素供应反倒影响水稻叶绿素积累,而叶绿素含量是作物长势的重要参数,因此,过高的氮素供应不但造成浪费,还会影响水稻生长。
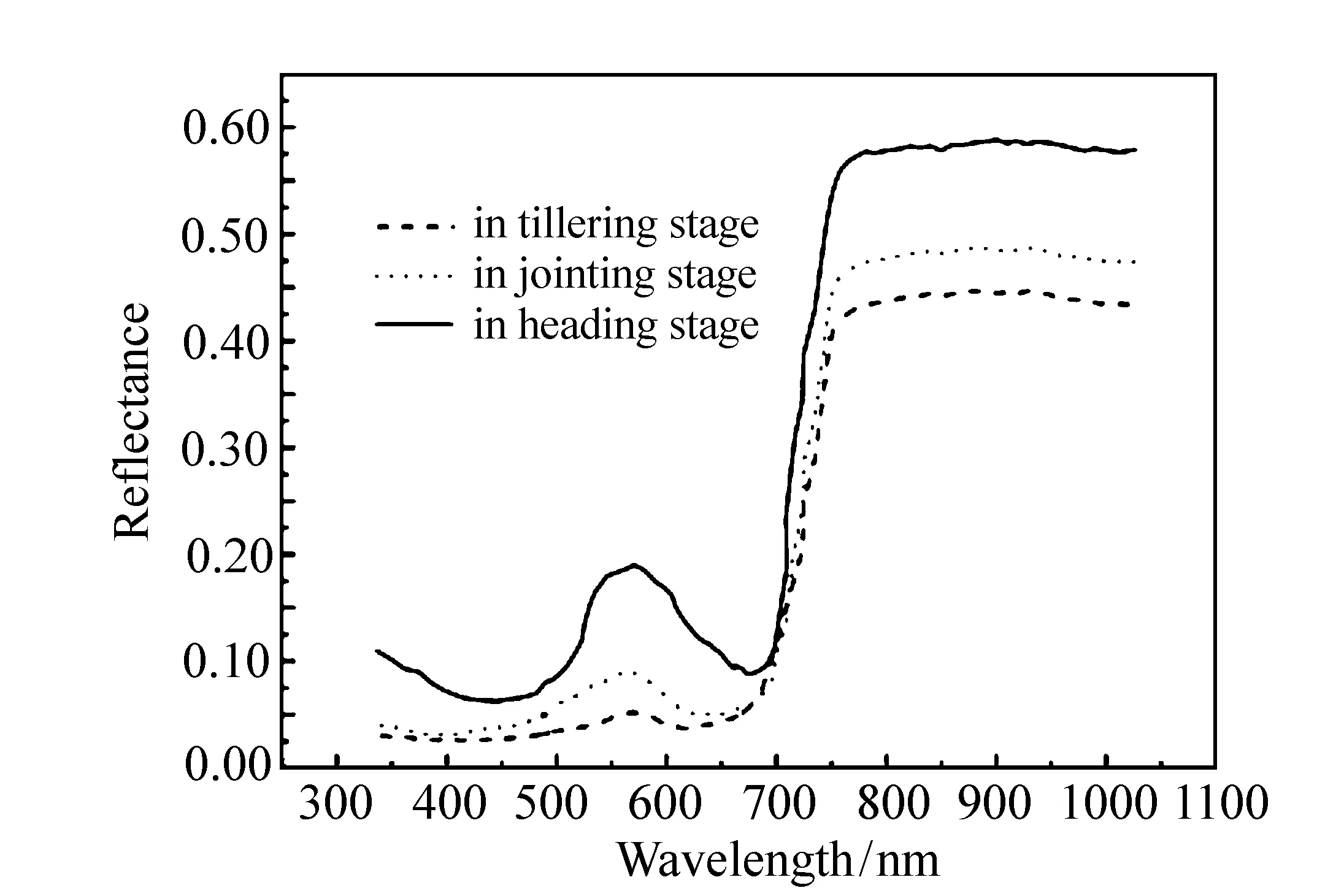
图7 抽穗期不同氮素营养水平水稻冠层反射光谱 Fig.7 Canopy reflectance spectra in heading stage at different nitrogen levels
图7为N3施氮水平水稻冠层光谱反射率随生长进程变化曲线,由图7可以看出,随着水稻生长进程的增加,水稻冠层光谱反射率增加,其原因是随着生长进程增加,叶绿素的含量不断提高,使得对蓝、红光的吸收效应和近红外的反射效应增强。
3.2 不同氮素水平下水稻植被指数的变化
植被指数用来表征作物生长水平,本文采用的RVI和NDVI来分析水稻氮素水平和植被指数的关系
其中NIR为红外波段光谱反射率,R为红光光谱反射率。图8为由光谱反射率计算得到的植被指数RVI和NDVI,为减小单点光谱误差影响,NIR为红外波段光谱,选择760~900 nm,R为红光光谱,选择630~690 nm,选择范围与美国陆卫5卫星上专题制图仪(Thematica pper) 波段TM4(760~900 nm)、TM3(630~690 nm) 相当[19]。

图8 不同氮素水平水稻光谱植被指数RVI与NDVI变化 Fig.8 Variation of RVI and NDVI of rice under different nitrogen levels
从图8a中可看出,水稻植被指数RVI随生育期进程先增大再减小。4种氮素水平N1到N4条件下,分蘖期到拔节期之间RVI不断增大,拔节期至抽穗期之间逐渐减小,且抽穗期RVI值小于其分蘖期RVI值。上述变化原因分析为:水稻生长进程中,植株不断壮大,随着叶面积不断增加以及叶绿素含量的增高,对近红外波段的反射率不断增强,同时叶绿素含量的提升使作物对可见波段红光的吸收增强,因此RVI值在分蘖期到拔节期随生长进程显著增加。从拔节期到抽穗期生长进程中RVI值显著减小,分析其原因,随着生长进程不断趋于成熟,叶面积逐渐减小,水稻冠层对近红外波段的反射强度逐渐减小,对可见光波段的红光吸收效应减弱,导致RVI显著减小,另一方面,随着生长进程水稻穗数逐渐增多,稻穗的反射光谱在近红外波段和可见波段,和水稻冠层叶片的反射光谱之间的差异逐渐增大,直接体现为稻穗对水稻冠层光谱的影响不断增强,同时随着水稻成熟进程的增加,水稻叶片颜色逐渐由绿转黄,叶绿素对红光的吸收减弱,可见波段的红光反射增强,因此,水稻RVI随拔节期向抽穗期进程显著减小。
NDVI在分蘖期至抽穗期的生育期内变化如图8b所示,可以看出,NDVI也呈明显的规律性变化,4种氮素水平N1到N4条件下,从分蘖期到拔节期NDVI都逐渐增大,拔节期至抽穗期逐渐减小,且抽穗期NDVI值小于其分蘖期NDVI值。归一化植被指数NDVI对简单比值植被指数RVI进行了非线性归一化处理并限制了RVI的无界增长,从图8b中也可以看出NDVI的其整体变化规律同RVI是一致的。
由图8a和图8b可以看出,相对N3的施氮水平,N4施氮水平下水稻RVi和NDVI两种植被指数均小于同生育期N3施氮水平水稻的植被指数,其结果同图2光谱反射率结果相一致,因此,植被指数RVI和NDVI都可以反映和水稻长势密切相关的叶绿素含量,两种植被指数的大小与氮含量、叶绿素含量有直接对应关系,对过量施用氮素影响水稻生长也可以直观反映在植被指数RVI和NDVI上。
4 结 论
本文利用多旋翼无人机搭载光谱仪对不同施氮水平的水稻关键生育期进行了遥感测量,测量结果表明不同氮素营养水平水稻的冠层光谱存在差异,在可见光区水稻冠层反射率随氮素水平增加而减小,在近红外区,光谱反射率一开始随氮素水平增加而增大,但氮素水平增大到一定程度后再增加氮素导致反射率降低。水稻植被指数 RVI和NDVI都随生育期进程先增大再减小,4种氮素水平条件下,从分蘖期到拔节期RVI值都不断增大,拔节期至抽穗期又逐渐减小,且抽穗期RVI和NDVI值小于其分蘖期RVOI和NDVI值。因此,植被指数RVi和NDVI都可以反映和水稻长势密切相关的叶绿素含量,且两种植被指数的大小与氮含量、叶绿素含量有直接对应关系,对过量施用氮素影响水稻生长也可以直观反映在植被指数RVI和NDVI上。实验结果说明利用多旋翼无人机为平台同步搭载光谱仪器构成农情遥感监测系统在反演作物植被指数方面是可行的。本文设计的基于无人机平台的遥感数据采集系统能够有效、实时获取光谱信息,其获取的农田实时信息,高空间分辨率和光谱分辨率等能够为作物长势分析、健康状况监测提供必要的数据支持。另外,无人机平台在低空(几米至几十米)遥感数据受大气、云层风等外界因素的干扰较小, 可以更加准确地反映反演区真实状况,可以作为现有卫星、航空以及地面遥感的有益补充,作为一环构建更为合理的综合遥感系统。
猜你喜欢
中国农业科学(2022年8期)2022-05-16 05:15:10
今日农业(2021年6期)2021-11-27 08:05:59
水土保持研究(2018年5期)2018-10-12 05:29:52
中国农业信息(2018年2期)2018-07-28 08:02:10
吉林农业·下半月(2017年7期)2017-07-15 02:25:36
农民致富之友(2017年6期)2017-05-10 15:27:16
动物营养学报(2015年10期)2015-12-01 06:45:19
西藏科技(2015年1期)2015-09-26 12:09:29
科技创新与应用(2015年28期)2015-05-30 20:03:40
江苏农业科学(2014年8期)2014-10-23 03:58:10