
航天器太阳电池阵驱动装置的新进展
2018-10-15 12:08王友平
导航与控制 2018年5期
王友平,苗 新
(北京控制工程研究所,北京100190)
0 引言
太阳电池阵驱动装置,国际上称之为SADA(Solar Array Drive Assembly),由太阳电池阵驱动机构(Solar Array Drive Mechanism,SADM)和太阳电池阵驱动线路(Solar Array Drive Electronics, SADE)组成。其主要功能为:支撑太阳翼、驱动太阳电池阵对日定向及在太阳电池阵和飞行器本体之间传递电功率和信号。
地球静止同步轨道及太阳同步轨道实现卫星的太阳电池阵对日定向一般只需要驱动装置有一个转动自由度,但对一些复杂轨道或具有特殊应用目的的卫星,在一个轨道周期内卫星及太阳电池阵对太阳光的入射角变化很大,用一个自由度的太阳电池阵驱动装置无法对准太阳,而需要采用两自由度太阳电池阵驱动装置。
1 航天器太阳电池阵驱动装置的研制情况
太阳电池阵驱动装置的应用背景是任务期较长的、三轴稳定的飞行器。现代三轴稳定飞行器大多数采用帆板式太阳电池阵,以满足空间飞行器在轨能源供应的需要。为使太阳能电池达到尽可能高的利用率,可以使用驱动装置使电池阵对日定向。
国际上,太阳电池阵驱动装置的开发和应用起源于20世纪60年代,很多公司研制了自己的驱动装置。早期多为特定卫星使用的专用设计,主流产品较少。主要国家的厂家/承包商如:美国Shaeffer Magnetic(现属 Moog)、 加拿大 SPAR、 法国SEP(后归属法国 Contraves、Snecma、瑞士 Oerlikon、瑞士RUAG)、 CNE、 Alcatel(现属 ThalesAlenia)、 德 国Dornier(现属 EADS Astrium)及 Teldix、 英国 BAE、印度ISRO(印度空间研究组织)、日本东芝、俄罗斯萨马拉专门设计局等[1⁃2]。
发展到21世纪的今天,太阳电池阵驱动装置已开发了三代至四代产品,各厂家有各系列多种规格的产品,太阳电池阵驱动装置已成为多数三轴稳定飞行器必不可少的重要机电部件。
其中,目前在空间应用较多的有美国Moog、欧洲EADS Astrium和RUAG等知名公司的产品。
美国 Moog公司 Shaeffer Magnetics Division(原Shaeffer Magnetic INCO.)研制的太阳电池阵驱动装置主要由步进电机、谐波减速器和导电滑环组成,有多种规格的系列产品,还有两自由度/双轴太阳电池阵驱动装置,在Mightysat、“铱”星星座等项目中得到应用[3]。
德法EADS Astrium公司的太阳电池阵驱动装置生产于该公司德国分部(其前身是德国Dornier公司)。研发的4种类型太阳电池阵驱动装置得到广泛应用,技术成熟,有丰富的飞行经验,曾经应用于EuroStar2000、 EuroStar3000、 TVsat和 BAe等卫星。作为ESA参与哈勃太空望远镜的项目,为哈勃太空望远镜提供了太阳电池阵驱动装置。太阳电池阵驱动线路(SADE)经过太空望远镜在轨维修更换返回地面,获取了重要的经验[4]。
瑞士RUAG Space公司拥有SEPTA系列7个类型的太阳电池阵驱动装置,传输功率覆盖100W~30kW范围,应用于SPOT、Galileosat等卫星项目,累计飞行时间超过650星年[5]。
德国Teldix GmbH公司研制的太阳电池阵驱动装置用于中等功率卫星,在德法电视卫星、DFS⁃Kopernikus卫星以及中国东方红三号平台多颗卫星上使用。由600齿16相步进电动机驱动,光电零位传感器作为角位置基准,使用盘式导电环传输功率和信号[6]。 2010 年, Teldix被 RCD(Rockwell Collins)公司收购,其SADA已停产。
2 近年来太阳电池阵驱动装置的发展
2.1 高传输功率太阳电池阵驱动装置
几十年来,卫星对SADM的功率传输需求,已经从低于1kW提高到10kW以上。大平台和空间站的发展对传输功率提出了更高的要求,电池阵的质量更大,大力矩、高传输功率的机构已成为产品发展的方向之一。
例如,欧洲Astrium公司E2000系列SADM的功率传输能力为5.6kW,可以满足Eurostar2000系列的卫星需求。而对于Eurostar3000系列的卫星,最大功率传输需求提高至15kW,为此 EADS Astrium开发了E3000中功率型和E3000高功率型太阳电池阵驱动机构[4,21],如图1所示。改盘式导电环为柱式导电环,放弃了Ag⁃MoS2电刷对偶镀金环,采用合金电刷对偶镀金环,并兼容了50V和100V母线,以满足Eurostar3000系列的卫星工作的需求,主要技术指标如表1所示。

表1 EADS Astrium公司E2000/E3000型太阳电池阵驱动机构技术指标Table 1 Specifications of E2000/E3000 SADM
又如日本东芝(NEC/Toshiba Space)的 Type 2型太阳电池阵驱动装置[7],如图2所示。该驱动装置在日本对地观测卫星ALOS卫星使用,其传输电流大于 150A(50V),单个 SADA传输功率超过7kW,并针对单翼太阳电池阵卫星采取了高可靠的设计,双电机/离合器备份,其典型技术参数如表2所示。

表2 日本东芝的Type 2型太阳电池阵驱动装置典型技术参数Table 2 Specifications of Type 2 SADA
法国Thales Alenia Space的高功率类太阳电池阵驱动装置也是适应大功率需求的一种产品[8⁃9],该驱动结构用于ESA Automatic Transfer Vehicle(ATV)、Spacebus等空间计划。其驱动装置图及相应技术性能指标如图3和表3所示。

表3 Thales Alenia公司高功率型太阳电池阵驱动装置技术指标Table 3 Specifications of high power SADA
瑞士RUAG公司SEPTA24型太阳电池阵驱动装置[10]是适应大功率需求的典型的产品之一,如图4所示。该产品是用于Thales Alenia公司的Spa⁃cebus卫星的SEPTA23型产品的替代品,RUAG公司2006年开始研发,2012年通过鉴定,完成了14000转的寿命试验。该产品采用步进电机和谐波齿轮传动,可以配置一个或两个功率导电环组件,以扩展传输功率,其技术参数[5,10]如表4所示。

表4 瑞士RUAG公司SEPTA24型太阳电池阵驱动装置技术指标Table 4 Specifications of SEPTA24 SADA
为适应大功率SADM的需要,导电环专业厂家瑞士RUAG Space(Nyon)公司开发了新一代先进导电环技术。图5是该公司为SpaceBus G3 SADA研制的导电环⁃角度传感器组合结构,导电环采用金对金(gold⁃gold)刷丝式导电环,传输功率从Spa⁃ceBus G2的16.5kW提高到G3的27kW,同时为低精度要求的SADA提供绝对角度测量及冗余备份[11]。
2.2 微小型和低成本太阳电池阵驱动装置
小卫星和微小卫星由于成本低、研制周期短等优点,具有很大的市场潜力。虽然微小卫星较少使用活动太阳电池阵,但功能强大的微小卫星对SADA仍有需求,微小型SADA在多个公司得到发展。
如图6所示,瑞士RUAG公司SEPTA 41是这类驱动结构的典型产品之一,这是一款机电一体化太阳电池阵驱动装置,质量只有1.65kg,传输功率可达到600W,应用于CNES(法国宇航)开发的微型卫星平台。SEPTA 41于2005年首飞,之后经过改进形成升级版的SEPTA 41Ev[12],寿命由2年提高到5年,且大部分使用COTS元器件以降低成本。SEPTA 41Ev于2009年开始飞行,其主要技术指标如表5所示。
SEPTA 41及SEPTA 41Ev将电机直接驱动的SADM和SADE集成在一起,内部结构十分紧凑。SADM由步进电机直接驱动,由SADE控制,可通过64细分使SADM输出轴达到每转23040微步,SADE测量电位计角度,通过RS422接口与外界联系,其产品如图7所示。

表5 瑞士RUAG公司SEPTA 41Ev的主要技术指标Table 5 Specifications of SEPTA 41Ev SADA
图8是劳拉公司空间系统部设计制造的Globalstar Engineering Model⁃1 微型 SADA[13], Global⁃star卫星用于低轨道进行低成本、高质量全球电话及其他数字通信业务。
近年来,快速的技术进步使得立方体卫星(CubeSat)功能日渐强大,微型元部件得到快速发展。例如,Honeybee Robotics为NASA行星探测任务研制了一系列用于微小型卫星的姿控部件,其中包括微型机电一体化的SADA。图9即是一种Honeybee Robotics研制的立方体卫星 SADA[14], 传输功率550W,质量为180g。
此外,巴西宇航院(INPE)设计的小型BAPTA(Bearing and Power Transfer Assembly)采用传统 1.8°步距角的步进电机,100∶1谐波齿轮减速器,功耗为3W~5W,用于功率0.5kW以下、惯量1.0kgm2以下的刚性太阳翼的小卫星[15],如图10所示。
2.3 双轴或多轴太阳电池阵驱动装置
如前所述,在复杂轨道上运行的飞行器需要两自由度驱动机构实现帆板对太阳的跟踪和定向。实际上,即使是太阳同步轨道和地球同步轨道,由于卫星绕地球运行的轨道平面与地球绕太阳转动的轨道平面之间有一定夹角,单轴转动的太阳帆板也往往不能准确地对准太阳。因此,有些卫星将太阳电池阵偏置一定角度以提高光电转换效率。配备单轴SADA或是配备双轴SADA往往是系统级各项指标权衡的结果。
国际上,使用过双轴SADA的国家有美国、俄罗斯和中国,欧洲一般采取使用单自由度的SADA和单自由度的旋转机构在卫星上组装,实现两自由度的功能。
真正的两轴控制在一些特殊型号上仍然得到应用。应用实例如:2009年6月18日发射的NASA月球探测轨道器(Lunar Recomnaissance Orbiter, LRO),其太阳电池阵系统和高增益天线系统使用了类似设计的两自由度驱动装置[16], 由 SNC(Sierra Nevada Corporation,前SpaceDev)的子公司Starsys研制。
如图11所示,英国SSTL公司(Surrey Satellite Technology Ltd)研制的双轴太阳电池阵驱动机构BSADM(Bi⁃Axial Solar Array Drive Mechanism)[17]及与其配套的BSADE用于低轨,其主要技术参数如表6所示。
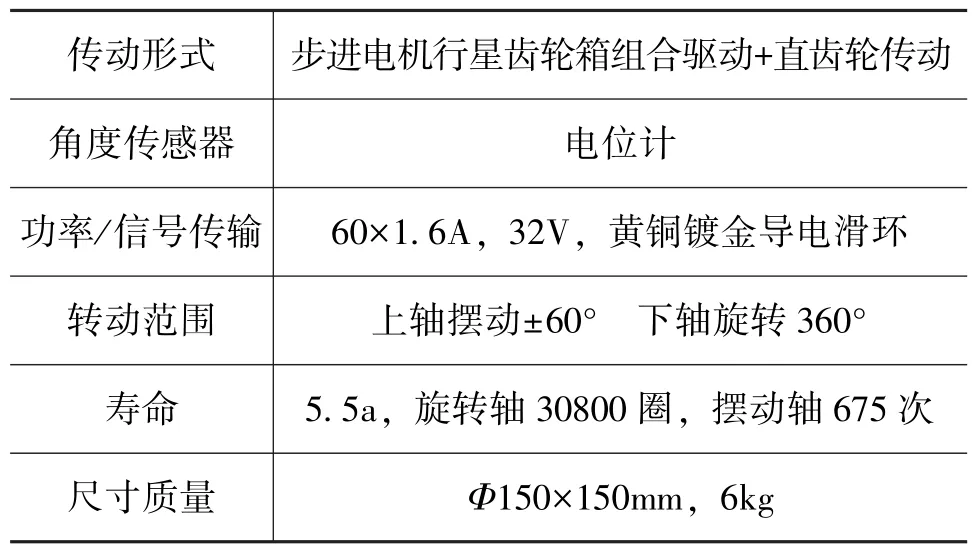
表6 英国SSTL公司双轴太阳电池阵驱动机构技术指标Table 6 Specifications of BASDM
2.4 运行于MEO轨道的太阳电池阵驱动装置
许多卫星需要在比较复杂的环境下工作,这对相应的SADM的研制有比较苛刻的要求。
如图 12所示,RUAG公司 SEPTA33型SADM[18]是为欧洲导航系统开发的,需要运行于轨道周期为14.1h的MEO轨道,要求极高的可靠性,需要承受在轨苛刻的机械环境、热环境以及辐射环境。
SEPTA33可承受帆板展开和转移轨道的高载荷,在运转过程中能提供很高的刚度。该机构具有备份步进电机、高速比的齿轮箱,不通电即能提供固有保持力矩,使低速转动时功率需求最小,模块化设计可以为用户提供选项。产品经过21000转的寿命试验,于2011年开始飞行,其主要参数指标如表7所示。
2.5 深空探测领域太阳电池阵驱动装置
深空探测领域的SADA往往伴随着恶劣的空间环境。
如图13所示,水星探测器 “贝皮⁃科伦布”(BepiColombo)由欧空局(ESA)和日本航空航天局(JAXA)联合开发,由水星转移舱(MTM)携带两个独立的探测器,即ESA开发的水星行星轨道器(MPO)和JAXA开发的水星磁层轨道器(MMO)。该任务计划于2018年4月发射,预计于2024年12月到达水星,运行至2026年5月。
水星行星轨道器(MPO)的SADA由瑞士RUAG公司负责研制。该SADA工作的环境非常苛刻,因为水星行星轨道器(MPO)SADA滑环的工作温度高达200℃,远超常规滑环最高120℃的温度;指向精度也高于一般SADA,为0.2°;其最高工作转速6(°)/s比一般SADA要高出一个数量级,且需在1s之内加速到最高转速;同时,要避免地球至水星6年之久的星际旅行期间SADA休眠可能产生的冷焊问题。为此,SADA设计了步进电动机和直齿轮传动,采用粗精电位计组合作为角度传感器。SADA的功率导电环和信号导电环使用了不同的电刷技术,功率导电环采用碳刷以满足极端恶劣的温度环境和非常高的电流传输需求,信号导电环采用刷丝以节省空间[19⁃20]。
如图14所示,BepiColombo水星转移舱(MTM)的SADA则由挪威Kongsberg公司负责研制,即KARMA⁃5 型 SADM 和 KDAs ELEKTRA⁃5 型 SADE。该SADM传输功率为7.5kW,电机驱动组件可承受280℃高温,功率传输采用固体碳刷滑环,信号传输采用金对金刷丝滑环,其主要参数指标如表8所示。
Kongsberg公司长期从事深空探测产品,Rosetta彗星探测器SADM之后又用于MarsExpress火星快车探测器和VenusExpress金星快车探测器。该SADM传输功率为1.5kW,其功率和信号传输没有使用导电环,而是使用柔性卷线盒,可在±180°范围内旋转电缆,具有硬限位设计,其技术参数如表9所示。

表8 KARMA⁃5 SADM技术指标Table 8 Specifications of KARMA⁃5 SADM
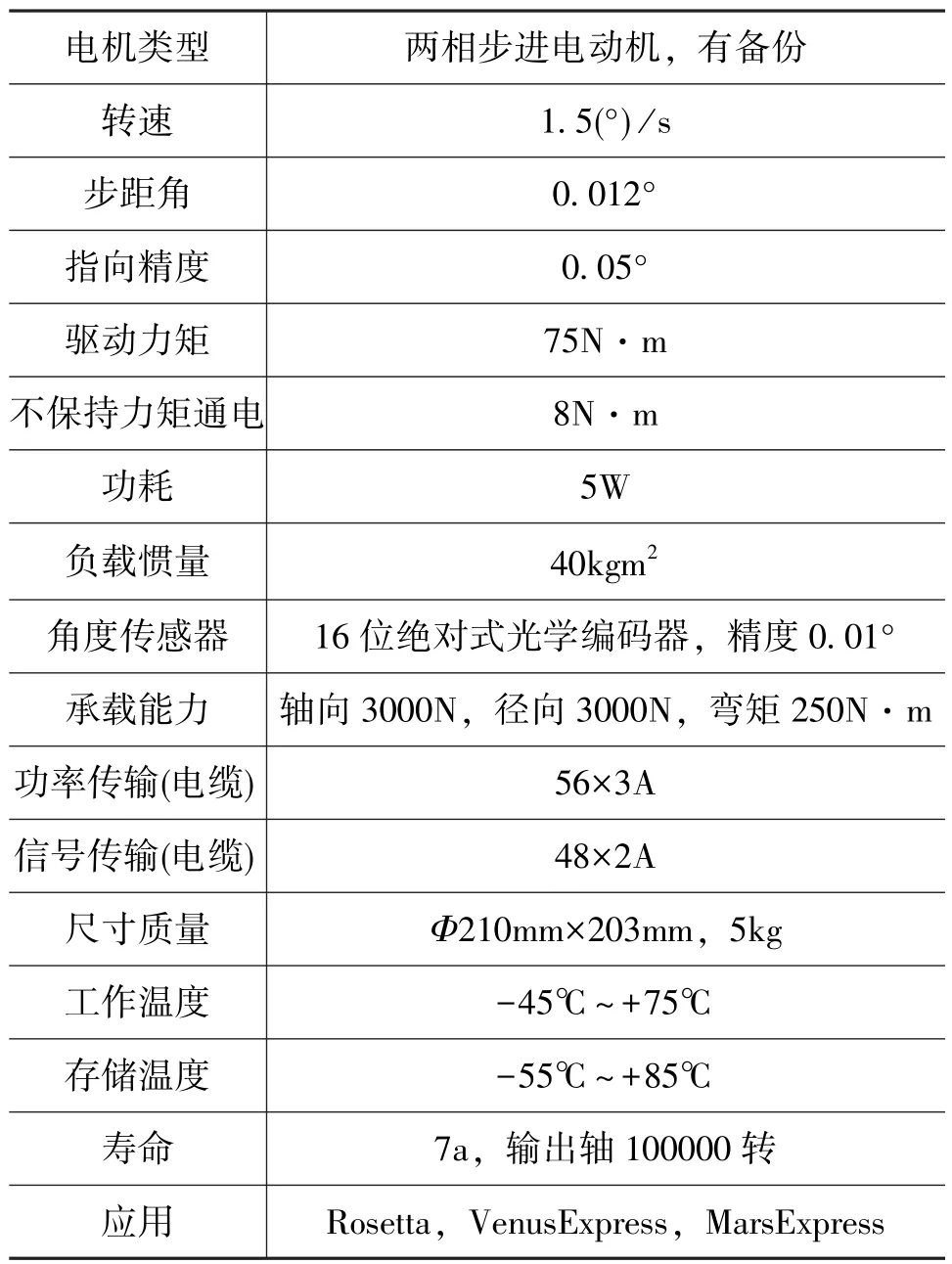
表9 Rosetta彗星探测器SADM技术指标Table 9 Specifications of Rosetta SADM
如图15所示,Kongsberg为欧空局 Sentinel⁃1研制的 KARMA⁃4型 SADM,总传输电流为90A,功率和信号传输可根据需要选配卷线盒或者导电环,角度传感器也可选配电位计或光学编码器。
2.6 高稳定度太阳电池阵驱动装置
不论刚性、半刚性或是挠性的太阳电池阵翼板,其转动通常都是卫星Y轴方向最大的扰动源。对于高分辨率的对地观测卫星、光学遥感卫星来说,高稳定度、低扰动的驱动及控制成为重要问题。
转动部件的驱动控制通常有两种解决方案:闭环同步连续控制系统及开环增量运动控制系统。只有早期的太阳电池阵驱动装置使用过有刷直流电机和无刷直流电机,现代的太阳电池阵驱动装置普遍使用步进电机。步进电机提供了一种不需要复杂闭环控制的位置和速率控制方法。当平台稳定性要求苛刻时,人们致力于微扰动力矩步进电机,使步进电机转矩扰动最小化,并使用直接驱动代替齿轮传动。直接驱动型SADA通常采用超小步距角的步进电机驱动,并广泛采用微步细分控制技术以获得更高的稳定度。如果仍然不能解决对飞行器的力矩扰动问题,则需要考虑使用直流电动机,在这种情况下,需要对太阳电池阵定位及转速使用闭环控制。
美国在20世纪90年代的哈勃太空望远镜的平台稳定度达到了 2×10-8(°)/s, 哈勃太空望远镜使用了EADS Astrium公司研制的直接驱动的太阳电池阵驱动装置,以保证稳定指向和扰动力矩最小化。
高精度的地球观测卫星如 SPOT⁃5,配置RUAG Space的 SAPTA⁃14型 SADM,该机型单机质量达到45kg,采用高分辨率步进电动机直接驱动实现太阳电池阵的高稳定度驱动,可以忽略转速波动的影响,是一种高刚度、高稳定度、长寿命、大功率的产品。
目前,世界上分辨率最高的商业光学遥感卫星 GeoEye⁃1、 WorldView⁃1、 WorldView⁃2 等 采 用SpaceDev的子公司 Starsys Division提供的SADA。GeoEye⁃1 对平台的稳定度要求高达 2×10-6(°)/s,分辨率达0.41m,Starsys采用超静驱动技术(Quiet Array Drive,QuAD)以保证太阳电池阵转动工作时不影响高分辨率相机拍照。
3 太阳电池阵驱动装置的发展趋势
综合国际上太阳电池阵驱动装置的技术实现,可以看出SADA产品的主流设计思想。
SADM的典型构成部分包括:驱动电机组件、轴系组件、导电环组件、角位置检测器等。
以Thales Alenia Space的高功率类(HP)太阳电池阵驱动装置[22]为例说明太阳电池阵驱动装置的典型构成,如图16所示。
电机驱动组件一般采用步进电动机驱动,可以采用电机直接驱动、直齿轮减速或谐波齿轮减速等各种驱动模式。步进电机结合SADE微步细分驱动技术应用广泛。
轴系组件一般采用角接触球轴承、深沟球轴承等类型,固体润滑为主,也有油脂润滑方式。
盘式导电环和圆柱式导电环均有广泛应用,根据具体任务需求选择最佳方案。
导电环多为镀金环,导电环电刷主要有刷丝式电刷(或刷丝束)和刷块式电刷两种形式。在轨应用数量中,刷块式电刷占多数;近年新开发或改进的产品中,金合金刷丝对偶镀金环占大多数。
角位置检测一般选用电位计、旋转变压器或编码器等绝对式角度测量元件,或与零位开关配合使用。
可靠性提高,各公司对产品的环境适应性、承载、绝缘等方面不断深入研究,一般新研产品在鉴定阶段均完成了寿命试验。
国外太阳电池阵驱动装置的需求和发展呈现以下主要趋势:
1)大型载荷和空间站的发展对传输功率提出了更高的要求,电池阵的质量将更大,大力矩、高传输功率的机构是下一步发展的方向之一。
2)低成本和快速交付的优势使得微小卫星和微小型SADA有其发展市场,微型SADA、立方体SADA更倾向将SADM和SADE集成一体。
3)对高稳定度太阳电池阵驱动装置的需求增多,提高稳定度、降低干扰需要在高性能电动机、高性能的电机驱动电子线路、SADA驱动控制策略与卫星控制系统、整体结构设计等方面继续研究。
人类对于深空的探索活动,催生适用于深空探测航天器的产品。
4 结论
本文根据收集到的资料和信息介绍了国际太阳电池阵驱动装置的应用情况和研究现状,尝试从高传输功率太阳电池阵驱动装置、微小型及低成本太阳电池阵驱动装置、恶劣空间环境下的应用、双轴太阳电池阵驱动装置、高稳定度太阳帆板驱动机构等几个方向探讨了国外研发太阳帆板驱动机构的技术指标和应用情况,探讨该方向的研发重点、应用前景及发展方向。重点介绍了国外新研太阳电池阵驱动装置的技术指标和应用情况,可作为了解国际太阳电池阵驱动装置发展方向研究的参考。
猜你喜欢
材料与冶金学报(2022年2期)2022-08-10
太阳能(2021年10期)2021-11-03
太阳能(2021年10期)2021-11-03
北京航空航天大学学报(2021年7期)2021-08-13
小天使·一年级语数英综合(2020年5期)2020-12-16
上海航天(2020年3期)2020-07-01
中国航海(2019年2期)2019-07-24
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
科技创新导报(2016年5期)2016-05-14
