
空间机器人全局逼近收敛控制
2018-10-13 08:18:34张欢庆刘宜成
电光与控制 2018年10期
张欢庆, 刘宜成
(四川大学电气信息学院,成都 610065)
0 引言
随着人类在太空领域的探索不断深入,空间机器人的应用越来越广泛,例如,航空器维修、空间站建设、卫星捕获等太空任务[1-4],空间机器人将在未来的空间工程中扮演重要角色。针对不断提出的新任务要求,设计出合适的空间机器人系统控制器显得尤为重要[5]。对空间机器人的研究不同于地面机器人:一方面,空间机器人的机械臂与基座之间存在动力学耦合作用,整个系统服从动量守恒定律,其动力学方程不具有线性参数化的性质,复杂度更高;另一方面,空间机器人的动力学模型非常复杂且存在许多不确定性,如基座与机械臂的质量、转动惯量等参数无法获得精确值,并且太空中工作环境复杂,外部信号和测量噪声都会对机器人系统造成干扰。如果设计的控制器不能对外部干扰起到抑制作用,不仅会降低控制器的性能,还会影响系统的稳定性。
针对上述的复杂空间机器人系统,很多控制方法被提出。文献[6]提出分解运动速度控制方法,基于广义雅可比矩阵的概念,将机械臂末端执行器的期望运动速度分解为关节的期望速度,然后对各个关节进行伺服控制;文献[7]基于扩展的雅可比矩阵,设计了一种空间机器人的零反作用控制器,实现了末端执行器的轨迹跟踪与基座姿态调整。然而此类算法无法考虑避动力学奇异问题,也无法得到优化的控制输入。文献[8]研究了空间机器人自适应控制方案,解决未建模动力学问题;文献[9]研究了空间机器人基座姿态与机械臂末端执行器轨迹协调运动的自适应控制方法。自适应控制方案的主要思想是利用参数调节律对未知的系统惯性参数进行辨识,但如果存在不能由定常参数表示的外部干扰,参数估计误差就很难收敛。文献[10]提出了鲁棒模糊神经网络控制方法,但神经网络控制方案的设计比较繁琐,且需要预先对神经网络进行初步训练。
本文结合文献[11]的思想,采用低复杂度全局逼近收敛控制方法,控制器设计简单,且不需要对系统模型参数线性化,避免了类似反演控制神经网络等方法带来的复杂度高的问题,使得整个控制系统运算更为简便高效。本文针对空间六自由度单臂机器人系统进行抗干扰仿真,仿真结果表明,全局逼近控制方案较鲁棒补偿控制方案具有更强的鲁棒控制效果。
1 空间机器人系统模型描述
本文介绍的机器人系统是由基座和一个n自由度的机械臂组成,如图1所示,其中,Bi,Ji分别对应第i个连杆和关节轴,OI,O0分别表示惯性系和基座本体坐标系。
空间机器人系统的动力学模型可表示为

(1)
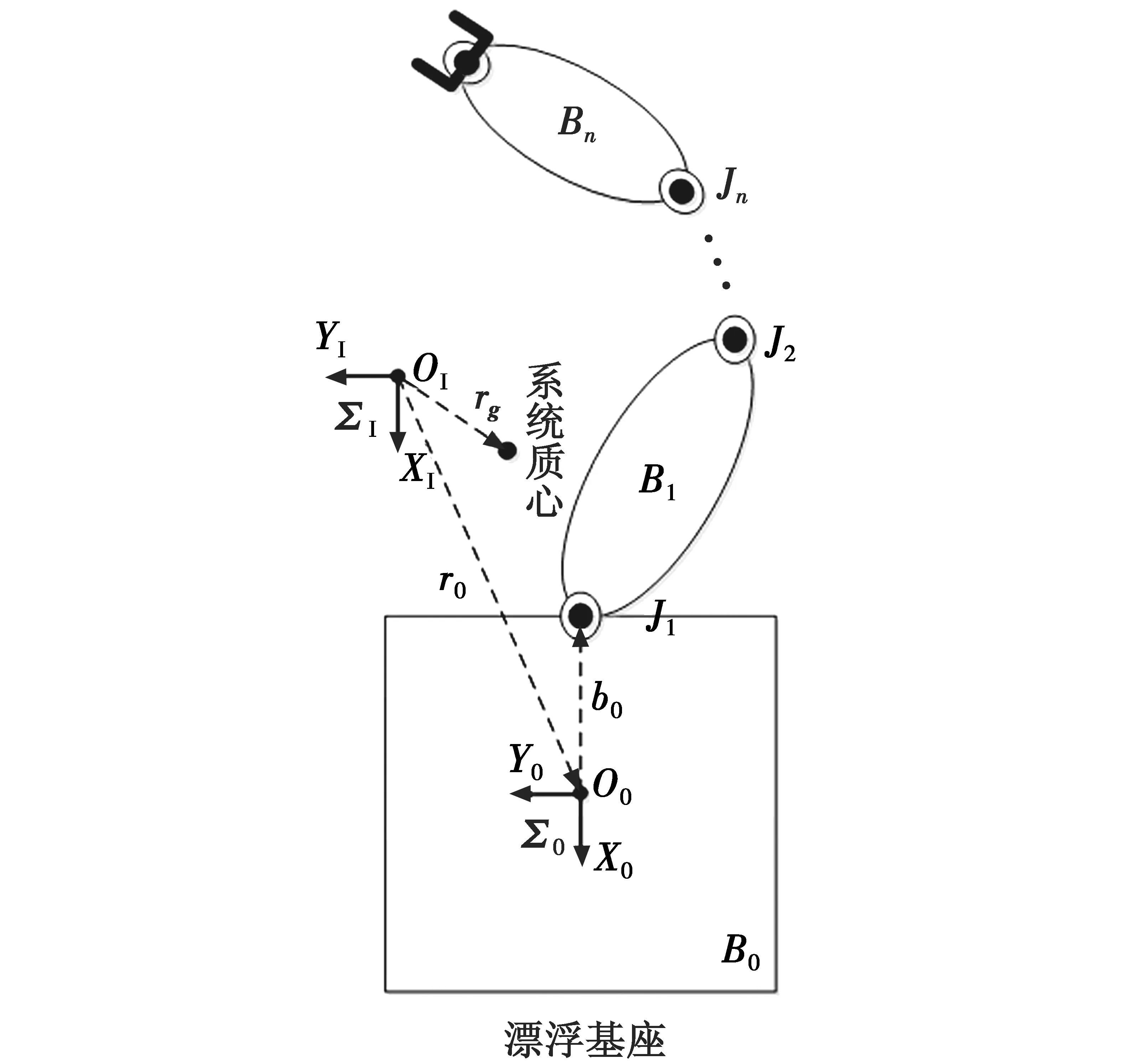
图1 空间单臂机器人系统模型Fig.1 The space single-arm robot system model
2 控制器设计

(2)

由于n自由度的空间机器人系统可看作是由n个类似的分散子系统构成,因此进行以下控制器设计及稳定性分析时,只对其任一一维子系统进行论述。
假设1 系统规划的期望关节角为θd,它连续可导且有界。
针对式(2)的二阶系统,对其第i个一维子系统设置控制器步骤如下。
1) 选择一个输出逼近函数
p1(t)=(p10-p1∞)e-l1t+p1∞
(3)
使其满足p1(0)>|xi,1(0)-θid(0)|,p1∞和l1分别为函数最大收敛误差与最小收敛速度。定义一个标准状态误差为
(4)
设置一个虚拟控制器为
(5)
式中,k1为一个正的控制增益。
2) 选择第二个输出逼近函数
p2(t)=(p20-p2∞)e-l2t+p2∞
(6)
满足p2(0)>|xi,2(0)-ai,1(0)|。标准状态误差定义为
(7)
设置控制输入为
(8)
式中,k2为控制增益。
3 稳定性分析
证明 考虑式(2)系统,对给定任意初始状态条件且满足假设1的期望轨迹,本文设计的控制器能够实现全局逼近收敛控制。
式(2)系统的第i个一维系统状态方程为
(9)
由式(5)、式(7)可得
xi,1=ξi,1p1+θid
(10)
xi,2=ξi,2p2+ai,1
(11)
根据文献[8]所提定理的特性, 可得对于∀t∈[0,tmax),有ξi,j∈(-1,1),j=1,2。
令
(12)
(13)
根据中值定理可得
(14)
式中,z*=λ(ξi,2p2+ai,1)+(1-λ)ξi,2p2。
将式(14)代入式(13)得

(15)


(16)
根据状态方程式(2)可得

(17)
(18)
(19)
所以
(20)
同理可得

(21)

即控制输入τi与虚拟控制信号ai,1有界,进而易得系统的状态变量xi,1,xi,2均有界。结合式(10)得

(22)
从而有

(23)
即对∀t∈[0,tmax),式(9)子系统输出可以跟踪上期望轨迹。
综上可得:对式(2)系统,给定任意初始状态条件和满足假设1的期望轨迹,本文设计的控制方案能够实现全局收敛控制。
4 仿真
通过仿真进一步验证该控制方案的实效性。本文的仿真对象为一个六自由度的单臂空间机器人系统,它由一个六自由度机械臂和基座组成,该系统机械臂的D-H参数及质量参数如表1、表2所示。
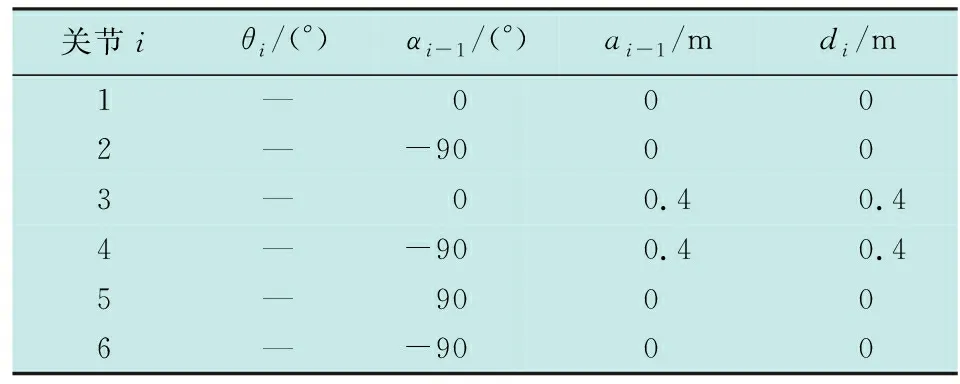
表1 机械臂的D-H参数

表2 空间机器人系统的质量参数
下面将给出仿真过程中,机器人系统的一些初始参数。基座的初始位置和姿态为:r0(t0)=[-0.28 0.310.32]T(单位,m);ψ0(t0)=[0 0 0]Τ(单位,°)。系统的线动量和角动量分别为:P=[0 0 0]Τ;L=[0 0 0]Τ。
假设机械臂期望的初始关节角为:Θd(t0)=[0- 47

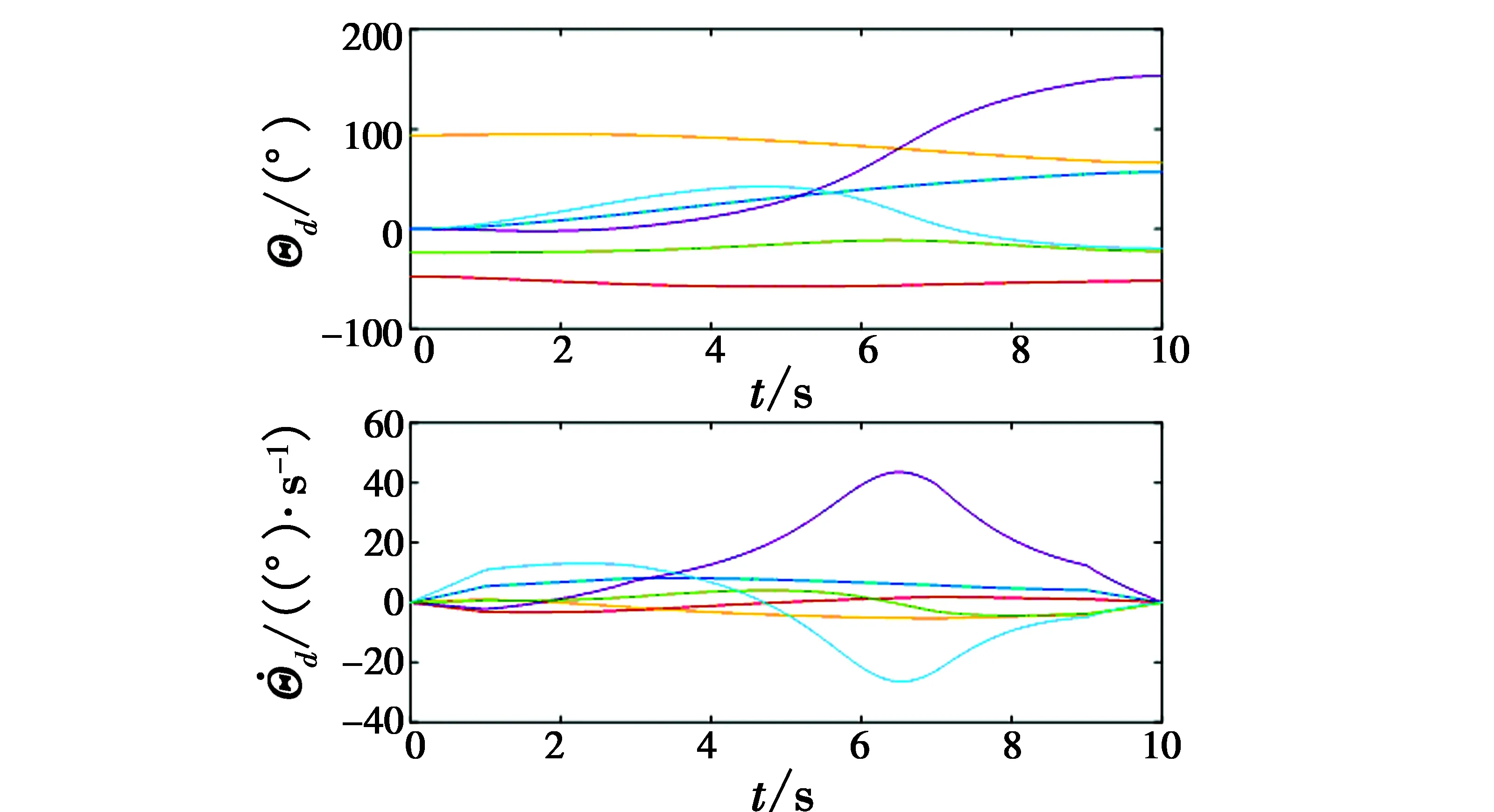
图2 机械臂的期望关节角与关节角速度Fig.2 The desired joint angle and joint angular velocity
为了证明该控制方案的误差收敛特性及强鲁棒性,设置机械臂实际的初始关节角为:Θ(t0)=[0-40800-200]Τ(单位,°),并在控制输入中添加适当的噪声干扰:d(t)=0.1randn(6),其中,randn(6)为六维列向量。
同等条件下,将本文设计的控制器与传统鲁棒补偿控制器做仿真对比。
图3表示两种控制算法对应的关节角跟踪误差,从图中可以看出:全局逼近收敛控制器对应的关节角跟踪误差可以收敛到±3.5×10-4(单位,°)以内,而鲁棒补偿控制器对应的关节角跟踪误差范围只能收敛到±3×10-3(单位,°)以内,显然全局逼近控制更有优越性。

图3 机械臂关节角跟踪误差Fig.3 The tracking errors of joint angle
图4、图5分别描绘了基于两种控制方法的机械臂末端位置和姿态误差曲线,其中,“A”曲线对应全局逼近收敛控制,“B”曲线对应鲁棒补偿控制。由图4、图5可知,两种控制算法对单臂机器人系统的控制效果有明显的差异。整体来看,本文提出的控制算法在误差动态收敛性能及稳态性能上均优于鲁棒补偿控制方法。综上可以得出:全局逼近收敛控制可以使受控系统具有较强的鲁棒性。

图4 两种控制方法对应的机械臂末端位置误差Fig.4 The position tracking errors of two controllers
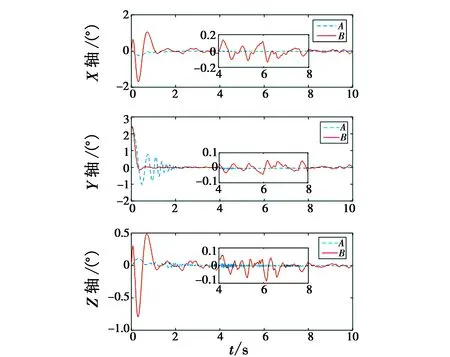
图5 两种控制方法对应的机械臂末端姿态误差Fig.5 The attitude angle tracking errors of two controllers
5 结论
本文以空间机器人系统为研究对象,基于全局逼近收敛控制方法设计了一个鲁棒控制器,实现在系统存在初始状态误差及随机噪声干扰条件下,对机器人系统的鲁棒控制。本文利用李雅普诺夫稳定性理论证明该控制器可以实现空间机器人系统的全局稳定,即该控制器可以实现高精度的路径跟踪。仿真结果也表明了该控制器较传统的鲁棒控制方案有复杂度低、鲁棒性能好等优点。
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:07:12
数学物理学报(2022年2期)2022-04-26 14:08:04
防爆电机(2021年2期)2021-06-09 08:14:48
模具制造(2019年7期)2019-09-25 07:30:00
船舶标准化工程师(2019年4期)2019-07-24 07:21:16
金桥(2018年4期)2018-09-26 02:24:54
中国卫生(2014年5期)2014-11-10 02:11:26
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
振动、测试与诊断(2014年4期)2014-03-01 01:14:08
自动化博览(2014年9期)2014-02-28 22:33:17
