
基于ZGCAD的封闭行星齿轮传动计算
2018-10-13 02:09:40袁士明
机械工程师 2018年10期
袁士明
(杭州临江前进齿轮箱有限公司技术部,杭州 311228)
0 引言
封闭行星齿轮传动具有结构紧凑、承载能力和传动比范围大等诸多优点,但该类传动形式结构复杂,国内尚未开发出一款具备此类齿轮传动形式计算功能的专业软件。郑州机械研究所开发的齿轮传动CAD集成系统(文中简称ZGCAD)是一款在国内已得到广泛推广应用的专业齿轮计算软件。本文以某进口风电增速箱行星齿轮传动部分结构为例,利用转化机构法[1]推导此类典型封闭行星齿轮传动的关键参数计算公式,并将计算结果依据啮合功率法[2]的基本原理换算成能够满足ZGCAD软件内置NGW行星齿轮计算模块的输入条件,实现封闭行星齿轮的强度计算。
文中用主字母i代表传动比,T代表转矩,n代表转速,P代表传动功率,A代表机构,Z代表齿数;主字母后如有上角标,代表固定构件;下角标前后分别代表输入和输出构件,示例如下:表示构件H固定条件下,构件a输入,b输出时的传动比;表示构件b固定条件下,构件a的传递功率。
1 结构简介
如图1所示:封闭差动行星齿轮传动是由一个双自由度差动行星齿轮传动和一个行星架固定的准行星齿轮传动串联而成的单自由度组合行星齿轮传动。
创建机构的功率流简图,如图2所示:机构输入功率P入(T入·n入),分别通过一级齿圈b1和二级行星架H2将功率分流至准行星机构与差动行星机构A(H2b2)a2,其中准行星机构又将所传递的功率通过二级齿圈b2汇入差动行星机构,并通过太阳轮a2将合流功率输出。为便于分析,将图1所示的封闭差动行星机构拆解为图3、图4[4]两个独立简化机构。

图1 结构简图

图2 机构功率流简图

图3 准行星机构

图4 差动行星机构
2 关键参数计算公式推导
2.1 传动比
2.1.1 准行星机构传动比
对于图3所示的准行星机构,因为行星架H1固定,所以其传动本质为一个内啮合和一个外啮合的定轴传动。则准行星机构的传动比为

2.1.2 差动行星机构传动比
对于图4所示的差动行星机构,通过转化机构法,首先推导各基本构件的转速关系式:
行星架固定的转化机构传动比为
则差动行星机构传动比


2.1.3 封闭行星机构传动比



2.2 基本构件[2]转矩计算公式推导(理论计算不计功率损失)
对于封闭系统功率平衡:T入·n入+Ta2·na2=0;则差动行星机构太阳轮转矩为

对于封闭机构转矩约束条件:

对于差动行星机构外转矩平衡:TH2+Tb2+Ta2=0;对于差动行星机构功率平衡:;则差动行星机构内齿圈转矩;应用行星齿轮传动普遍关系式:=1-,将T表达式简化得:b2

则差动行星机构行星架转矩为

对于准行星机构功率平衡:Tb1·nb1+Ta1·na1=0;则准行星机构内齿圈转矩为

对于准行星机构外转矩平衡:Tb1+TH1+Ta1=0;则准行星机构行星架转矩为

2.3 封闭行星传动功率推导
差动行星机构行星架分流功率[5]:

准行星机构内齿圈分流功率:

准行星机构太阳轮传递功率:

差动行星机构太阳轮传递功率:

2.4 输入ZGCAD软件的转化机构参数推导
由于ZGCAD软件内置行星齿轮计算程序只能对内齿圈固定的NGW结构进行强度计算,因此为了能运用该软件对此封闭行星齿轮传动进行强度计算,本文利用啮合功率法中关于行星机构在转化机构中,各构件间的相对转速、齿廓间的啮合作用力和摩擦因数都完全相同的论述,将图3、图4两个原始简化机构进行机构转化以满足软件的应用条件。
2.4.1 准行星机构参数公式
转化机构小轮(太阳轮)转矩:

转化机构该级行星传动减速比:

转化机构太阳轮转速:

转化机构太阳轮传递功率:

2.4.2 差动行星机构参数公式
转化机构小轮(太阳轮)转矩:

转化机构该级行星传动减速比:

转化机构太阳轮转速:

转化机构太阳轮传递功率:

3 实例计算
3.1 铭牌参数
计算所需的该增速箱铭牌参数如下:额定传递功率P入=3000 kW;额定输入转速n入=15.7 r/min。
3.2 齿轮参数
计算所需的该增速箱封闭行星传动齿轮部分测绘参数如表1所示。

表1 差动机构齿轮测绘参数
3.3 软件输入参数计算
将铭牌和齿轮参数代入转化机构计算公式后得到ZGCAD软件进行强度计算所需的等效输入参数值如表2所示。

表2 ZGCAD软件输入参数
3.4 准行星机构强度计算
将经机构转化后准行星机构强度计算所需输入参数依次填入软件输入栏框,如图5~图10所示。
在强度计算过程中,涉及到刀具、材料特性等输入选项,本例计算中选择软件默认输入,
其余选项依据实物测量数据及相关计算标准输入。
3.5 差动行星机构强度计算
差动行星机构强度计算输入选项与准行星计算输入完全一致,参见图5~图10依次将参数填入栏框,这里不再赘述。

图5 外啮合强度计算第1页
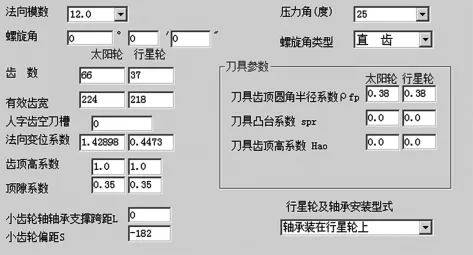
图6 外啮合强度计算第2页

图7 外啮合强度计算第3页

图8 内啮合强度计算第1页

图9 内啮合强度计算第2页

图10 内啮合强度计算第3页
3.6 强度计算结果
本例中通过ZGCAD软件计算所得的强度计算结果如表3所示。
3.7 国外软件计算报告
为了验证上述强度转换计算的正确性,在同等条件下,依据功率分流原则(式(15)、式(16)),分别对封闭行星传动的准行星级和差动级运用具备功能全面的的国外权威齿轮计算软件Kisssoft进行直接计算,所得结果如表4所示。

表3 封闭行星机构齿轮强度计算结果
3.8 结果讨论
两种软件在相同计算参数条件下,各级齿轮受力计算结果(文中未列出)完全一致,且通过表3、表4各级齿轮强度计算值的对比可见,ZGCAD计算强度虽总体略高于Kisssoft计算结果,但两者差异较小,完全可被接受。经分析导致计算结果差异的主要原因在于两种软件内置计算程序在引用标准上存在区别,并非计算方法有误。

表4 Kisssoft强度计算报告
实践证明,运用啮合功率法对行星齿轮传动进行机构转化计算在原理上完全正确。通过此方法借助ZGCAD软件进行封闭行星齿轮传动设计计算完全可行,且能够得到较准确的强度计算结果。
4 结语
本文应用啮合功率法的基本原则,通过机构转化法将原输入参数转化为ZGCAD软件内置NGW计算模块认可的输入条件,实现了用国产软件进行封闭行星齿轮强度的校核计算的实践探索,大大提升了齿轮强度计算的效率和准确性。从前述理论分析可知此方法亦可推广到其他各类复杂形式的齿轮传动计算过程中,具有广泛的应用价值。
本文通过对封闭行星传动机构传动比、分流功率表达式的推导,也为相关文献针对类似传动结构进行其他形式的等效分析方法提供了理论依据。
本文在前面分别推导了封闭机构太阳轮功率Pa1、Pa2与转化机构太阳轮啮合功率、的表达式,意在通过对比直观地说明利用啮合功率法所传递的啮合功率与实际传递功率不相同,切不可混淆概念造成计算错误。
猜你喜欢
机械设计与制造(2021年7期)2021-07-26 03:11:34
百科探秘·航空航天(2020年6期)2020-07-09 03:31:06
中学生数理化·八年级物理人教版(2019年5期)2019-06-25 00:58:58
读者(2018年20期)2018-09-27 02:44:48
潍坊学院学报(2017年2期)2017-04-20 08:44:17
电子制作(2017年10期)2017-04-18 07:23:16
电子制作(2017年23期)2017-02-02 07:17:24
少儿科学周刊·儿童版(2016年1期)2016-03-14 03:56:27
电测与仪表(2015年24期)2015-04-09 12:04:48
湖南大学学报·自然科学版(2014年2期)2014-12-25 14:06:15
