考虑阻尼和惯性的虚拟同步机建模方法研究
2018-10-12 08:24:10张宸宇袁晓冬郑建勇
电力工程技术 2018年5期
张宸宇, 杨 赟, 袁晓冬, 郑建勇
(1. 国网海上风电并网联合实验室(国网江苏省电力有限公司电力科学研究院),江苏 南京 211103;2. 东南大学电气工程学院,江苏 南京 210096)
0 引言
新能源发电所采用的电力电子接口具有响应速度快,功率吞吐迅速等特点,但并网控制策略无法为电网提供电压或者频率支撑,更不能提供惯性支撑和阻尼作用[1-3]。为使电力电子接口对电网实现电压和频率支撑,国内外学者提出采用下垂控制对电力电子接口进行调制[4],使其工作在发电机下垂特性曲线上。这一方法虽然使电力电子接口具有同步发电机的一些外特性,如实现p-f和q-v曲线,但是仍不能为电网提供阻尼和惯性。为模拟同步发电机的阻尼和惯性环节,通过在新能源发电装置—电力电子变换器直流侧配置储能器件,让变换器具有同步发电机的阻尼和惯性特性。
文献[5]首次提出虚拟同步发电机(virtual synchronous generator, VSG)模型,并充分考虑了机械和电磁暂态特性;文献[6]在提出模型基础上,给出了VSG及其在微电网中的应用方式;文献[7]则阐明了下垂控制本质上是一种典型的VSG控制,只是控制传函中缺失了阻尼和惯性环节。
本文在前人研究基础上[8-11]建立类似同步发电机机械方程的模型,让电力电子变换器具有同步发电机的阻尼和惯性特性,对电网友好互动。最后进行MATLAB/Simulink仿真和基于DSP 28335的实验,仿真结果和实验结果均验证了本文所提方法的可行性和正确性。
1 下垂控制
为使电力电子接口实现电压和频率支撑,国内外学者提出使电力电子接口装置工作在同步发电机下垂特性曲线上,将系统不平衡的功率动态分配给各个机组承担,保证微网系统中频率电压的统一[12],采用下垂控制对电力电子接口进行调制。典型的下垂特性曲线如图1所示。

图1 下垂特性曲线Fig.1 Droop Character
这一方法虽然使电力电子接口具有同步发电机的一些外特性,如变换器工作在p-f和q-v曲线上,但是由于缺乏旋转器件,不能为电网提供阻尼和惯性。形成的下垂控制示意图如图2所示,通过无功电压下垂曲线得到电压有效值E,有功频率下垂曲线得到电压相角φ,得到的电压指令值Eref经过经典电压电流双环得到调制波信号uref,经过PWM三角载波比较得到开关门级信号g。
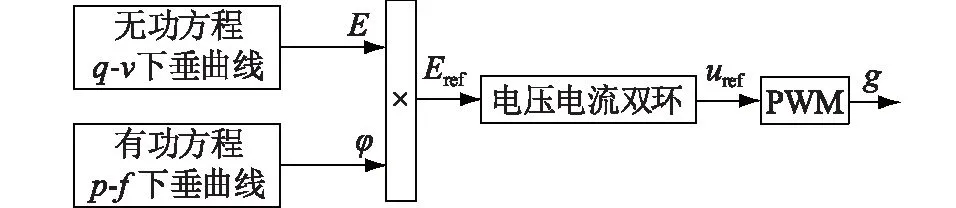
图2 下垂控制示意图Fig.2 Schematic diagram of droop control
图2中无功和有功下垂控制曲线方程为式(1),其中m,n分别为有功和无功方程的下垂参数,即下垂曲线的斜率;ω*,U*分别为空载角频率和电压值;ωn,Un分别为当前角频率和电压值;Pn,Qn分别为当前有功和无功功率值。
(1)
图2中电压电流双环控制如图3所示。通过图3中的功率外环(实现下垂曲线)和电压电流内环(实现电压电流跟踪)就可以实现电力电子变换器下垂控制。

图3 电压电流双环控制Fig.3 Double loop control diagram of voltage and current
2 阻尼和惯性
2.1 定义
稳定运行的电力系统,必须存在一定的阻尼。当电力系统受到扰动,其会因存在阻尼系数逐步稳定下来。系统阻尼大,稳定就快;系统阻尼小,稳定就慢。系统零阻尼,扰动引起的振荡就不会停息。这里的扰动和稳定主要是针对电力系统有功而言。
对于电力系统来说,惯性表现为系统阻碍频率ω突变的能力,从而使同步发电机有足够时间调节有功功率Pe,重建有功功率平衡。电力系统的惯性主要来自于发电环节中的旋转电机。物理解释惯性是由于旋转电机转子质量导致机械方程不能瞬间突变。电气上理解,惯性是由于指令信号的牵引或者延时环节的存在导致电气量存在延时。
2.2 让逆变器具有阻尼和惯性
为模拟同步发电机的阻尼和惯性环节,虚拟同步发电机技术应运而生,通过在新能源发电装置电力电子变换器直流侧配置储能器件,模拟实现同步机机械方程,让变换器具有同步发电机的阻尼和惯性特性。图4为同步发电机示意图,根据同步发电机写出机械方程:
(2)
式中:J为同步发电机的转动惯量;ω为机械角速度;Tm为同步发电机的机械转矩;Te为同步发电机电磁转矩;Td为同步发电机的阻尼转矩。
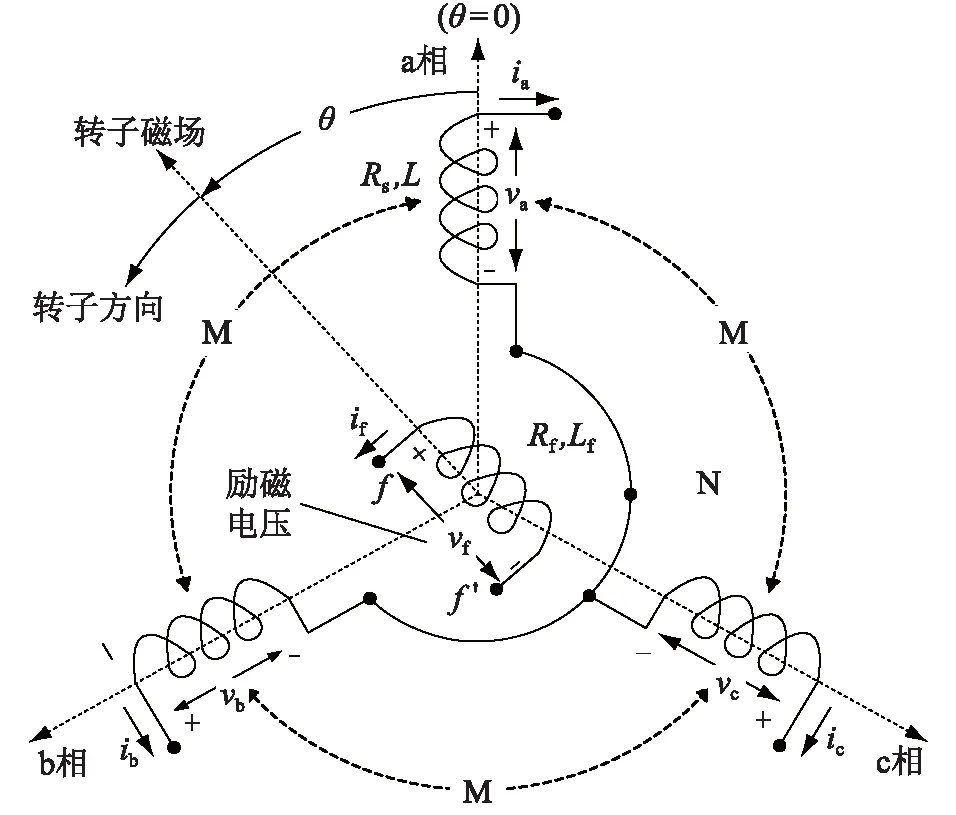
图4 同步发电机Fig.4 Synchronous generator schematic diagram
J即惯性系数,其数值和同步发电机尺寸和额定功率有关。可以利用惯性时间常数来定义转动惯量:
(3)
式中:Sn为同步发电机的额定容量;H为惯性时间常数,是同步发电机在额定转矩情况下从空载启动到达到额定转速所花的时间,不同一次能源机组的同步发电机的惯性时间一般不同,如水电机组H为1~3 s,而火电机组H为7~8 s。
同步发电机电磁转矩Te可以通过同步发电机输出的有功功率除以机械角速度得到:
Te=Pe/ω=(eaia+ebib+ecic)/ω
(4)
同步发电机的阻尼转矩Td的定义为:
Td=D(ω-ω0)
(5)
除了励磁绕组外,凸极同步电机的转子上还安装有阻尼绕组。若同步机并联在电网上,转子转速微小震荡时,阻尼绕组中感应电流所产生的电磁转矩会起到抑制转子转速震荡的作用。D为同步发电机阻尼系数,使其具有抑制系统功率震荡的能力,ω0为电网同步角速度。
通过机械方程可以给出虚拟同步机中阻尼和惯性的控制框图,如图5所示。

图5 虚拟同步机数学模型Fig.5 Mathematical model of virtual synchronizer
3 虚拟同步机控制
根据下垂控制思路,在有功方程后加入机械方程,建立控制中的阻尼和惯性体系,构成VSG控制(如图6所示)思路。

图6 VSG控制示意图Fig.6 VSG control schematic diagram
通过下垂控制的有功方程、无功方程中加入机械方程的改进,就可以从控制部分模拟同步机的阻尼和惯性,实现下垂外特性的同时,实现虚拟同步机控制,具体VSG整体控制如图7所示。

图7 VSG整体控制Fig.7 VSG overall control block diagram
4 仿真与实验
4.1 MATLAB/Simulink仿真
为了进一步验证本文提出VSG控制思路,利用MATLAB/Simulink对其进行仿真验证。仿真电路如图8所示,仿真参数见表1。

图8 仿真及实验电路Fig.8 Simulation and experimental circuit diagram
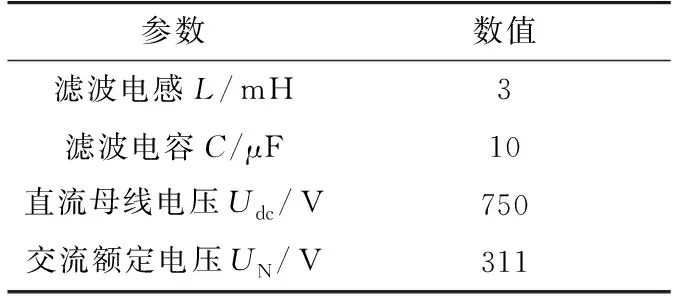
参数数值滤波电感L/mH3滤波电容C/μF10直流母线电压Udc/V750交流额定电压UN/V311
为了验证阻尼对虚拟同步机输出有功功率的影响,在仿真中设定VSG输出有功功率为5 kW,惯性参数设置为J=0.5 kg·m2,阻尼参数D分别取值7,10,15。仿真波形如图9所示。

图9 不同阻尼情况下的输出有功动态响应Fig.9 Dynamic dynamic response of output under different damping conditions
为了验证惯性系数对输出有功的影响,设定VSG输出有功功率为5 kW,阻尼参数设置为10,惯性参数J分别取值0.2 kg·m2,0.5 kg·m2,1 kg·m2。仿真波形如图10所示。

图10 不同惯性情况下的输出有功动态响应Fig.10 Dynamic dynamic response of output under different inertia conditions
通过改变阻尼和惯性对虚拟同步机输出有功功率的仿真,可以看出转动惯量决定动态响应过程中的振荡频率,阻尼系数决定振荡衰减的速率。
为了验证阻尼和惯性参数变化对虚拟同步发电机并网过程中角速度指令值对应频率的影响,分别取惯性系数J=0.5 kg·m2,D=10;J=0.6 kg·m2,D=10和J=1 kg·m2,D=15这3种情况进行仿真验证,仿真波形如图11所示。

图11 不同转动惯量和阻尼系数对应的频率变化Fig.11 Frequency variation corresponding to different moment of inertia and damping coefficient
通过图11可以看出,阻尼和惯性的改变可以改变频率响应特性,通过虚拟同步机有功输出去间接调整系统频率特性。
4.2 样机实验
为了进一步验证虚拟同步机控制策略正确性和可行性,利用实验室内现有DSP 28335平台设计一台5 kW虚拟同步机,直流侧电源采用大电网不控整流再经过DC/DC升压最终通过6800 μF的电容组(6800 μF,400 V耐压电解电容三并三串组成电容组)稳定在750 V。实验电路与仿真电路完全一致,其线路阻抗同仿真一致,输出滤波器为LC电路,滤波电感采用3 mH硅钢片电感,滤波电容为10 μF双层金属化膜电容。IGBT模块采用英飞凌单管IKW40T120,IGBT驱动采用落木源TX-DA962系列六单元驱动。实验采用TEK示波器DPO 2024对实验波形数据进行记录,实验波形如图12所示。

图12 虚拟同步机输出三相电流波形Fig.12 Output of three phase current waveform of a virtual synchronizer
通过图12可以看出本文采用的虚拟同步机控制技术在稳态时逆变器可以成功并网运行输出有效功率,并且控制稳定。
5 结语
下垂控制虽然使电力电子接口具有同步发电机的一些外特性,如实现下垂曲线,却不能为电网提供阻尼和惯性。本文阐明了下垂控制本质上是一种典型的VSG控制,只是控制传函中缺失了阻尼和惯性环节。为了模拟同步发电机的阻尼和惯性环节,本文通过分析如何从下垂控制演化为虚拟同步机控制,让电力电子变换器具有同步发电机的阻尼和惯性的特性。基于MATLAB/ Simulink的仿真和基于DSP 28335的样机实验验证了本文虚拟同步机控制算法的可行性和正确性。
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21 00:40:16
电气技术(2022年10期)2022-10-25 00:45:48
大电机技术(2022年1期)2022-03-16 06:40:08
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:06
数学物理学报(2021年3期)2021-07-19 06:02:32
数学年刊A辑(中文版)(2021年2期)2021-07-17 08:38:02
数学物理学报(2021年2期)2021-06-09 08:54:38
防爆电机(2020年4期)2020-12-14 03:11:02
成都信息工程大学学报(2018年3期)2018-08-29 01:08:40
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:23