
应用LDV测量水洞式游泳机波浪水流速度特性
2018-10-11 11:58牛洪涛李治明
实验技术与管理 2018年9期
牛洪涛, 李治明, 沈 熊,
(1. 清华大学 工程力学系, 北京 100084; 2. 北京飞骊佳科技服务有限公司, 北京 100084)
水洞式游泳机是一种新型的游泳健身设备,国内尚处于市场空白,它采用流体力学水洞原理,通过动力装置推动水流流动[1],游泳者在水池中朝向水流作相对游动,当泳速与流速一致时,游泳者就可以在原地长时间地游动,达到与大型普通游泳池中游泳的相同效果。游泳机的主流区是一个具有剧烈波浪水面的高湍流度流场,因为没有侧向窗口可以打光,或安装测量仪器,现有的测速方法均存在一定困难[2]。皮托管流速计在低湍流度和速度均匀度高的流场中可以得到准确的结果[3],但不适合用于高湍流度流场。常规的热线和热膜流速计都是在低湍流度的空气流场中校正的,在低速高湍流度条件下,必须有足够长的积分时间才能获得其真实平均值,而且还会有非线性误差叠加到校正曲线上[2]。粒子成像测速技术(PIV)对于波动水面也有局限性,它需要在两个方向上开窗口,以便入射光片和接收粒子散射光信号[4]。大尺度粒子成像测速技术(LSPIV)[5]可用于测量大面积水体表面流速,但是无法穿透水面测得深层水流速度。激光多普勒测速仪(LDV)无需校正,是测量高湍流度流场的有效手段[6],但是自由水面对激光束入射和散射光接收也有阻碍。为此本文专门设计了2个伸入水面的导光管,规避了自由水面对入射光和散射光传播的影响。提出了将后向散射转变成前向散射接收的测量体反射镜法,显著提高了散射光强度,可以在普通自来水质条件下获得良好的信号。
1 游泳机系统和测量装置
游泳机的结构见图1,它相当于一台水平布置的水洞装置。由螺旋桨叶推动的水流从动力箱流出,经过主流区(游泳者游动区域),进入后下方的栅格和安装有导流片的管道回流到前方的动力箱,完成水流循环。游泳机水面积约2 m×4 m,水深1 m,主流区的流速最大可以达到1.4 m/s,水流量可达0.3 m3/s。
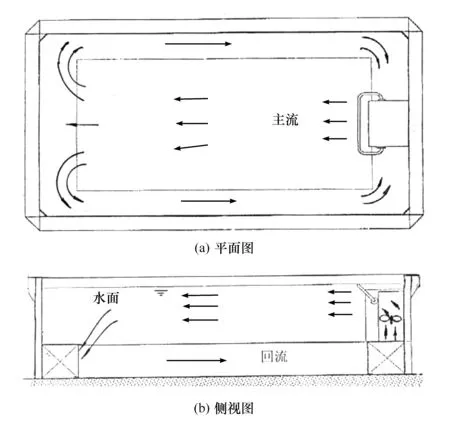
图1 游泳机循环水流和结构
由于游泳机空间结构狭小,水流急弯多,即使采用了精心设计的桨叶、导流片和整流栅格等减小阻力的措施,在高速时主流区的水流还是非常湍急,水面波浪较大。
采用的LDV为国内自制的SCD-1C型一维LDV系统[6],它由发射光单元、接收光单元和数字信号处理系统组成。光源采用100mW的半导体固态激光器,具有体积小、使用寿命长、维护方便等优点。受游泳机结构限制,LDV的发射和接收光单元必须安装在水面上方,并透过水流自由面进行(见图2所示)测量。为了克服这一难点,在发射镜头和接收镜头前面设计、加装了2个导光管,导光管的顶端安装了防水密封镜片。这样,当导光管的顶端伸入水中时,密封镜片就成了入射光和接收光的淹没窗口,避开了自由水面的影响。由于发射光束和接收光在水中的光程是不变的,可以通过数控坐标位移架在一定范围内移动测量点,而不需要对光学机构做任何调整,这是本方案的另一个重要优点。

图2 安装在游泳机上的LDV测速装置
为了解决后向散射光弱的问题,在双光束相交而成的测量体前方,以一定角度加装了一块反射镜片,将入射光束反射回来。适当调整好接收透镜的位置和接收角,可以接收到反射光形成的测量体。根据光散射理论[7],它的散射光强度和信噪比要比后向散射高得多,在不添加粒子的条件下,利用自来水中的自然微粒,按照平均相对粒径为1.0和相对折射率为1.22估算[8],前后向散射光增益系数之比可达300,可以顺利地实现测量。
图2中安装在游泳机上方的LDV装置,它被固定在一根横跨游泳机的铝合金导轨上,通过数控坐标位移架,可以对游泳机主流区断面(XY平面)内各点的轴向(Z向)流速进行测量。
图3表示发射光单元和接收光单元相互间的几何关系。为了清楚表达双光束光路和测量体,作图时有意将双光束平面旋转了90°,实际上应当垂直于纸面。可以按照测量部位要求选用发射透镜焦距和光束间距,据此确定导光管的直径和长度。
一维LDV的基本公式和光学参数如下[9]:
Uz=(λ/2sink)fd,k=tg-1(d/2f)
式中:Uz为游泳机轴向速度,fd为多普勒频率,λ为激光波长,k为光束半角,d为光束间距,f为入射透镜焦距。
取:λ= 532 nm,d=33 mm,f=300 mm,则Uz= 4.836fd,当流速Uz=0.5~1.4 m/s 时,频率fd=103~289 kHz。由此可以确定信号处理的频率范围。
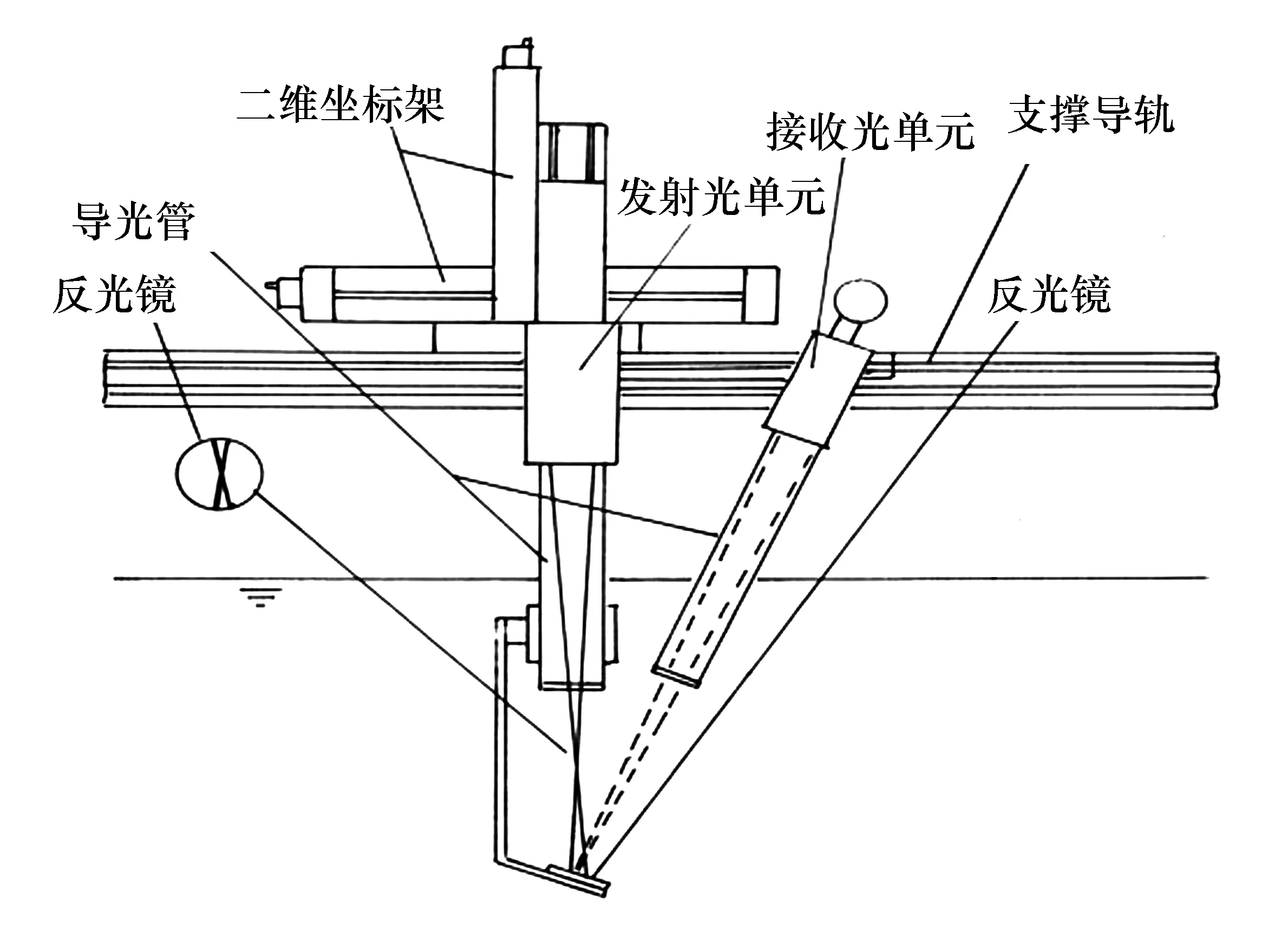
图3 LDV测量装置光机布置
多普勒信号处理采用XG-1型数字相关信号处理器,它可以对2路信号做自相关和互相关处理,自相关得到信号的频率,互相关得到2个信号之间的相位差。前者用于测量速度,后者可以同时得到示踪粒子的粒径。本实验采用的是一维自相关处理功能。来自光检测器的信号经过滤波放大预处理后,由数字自相关处理器确定频率值,经数据处理得到流速的瞬时值(即时间历程)、时均值、均方根值(标准差)、湍流度和速度直方图等统计量。
由于本实验水流的湍流度高、漩涡尺度大,要得到稳定的时均速度,必须增加采样时间,提高采样数,这可以通过可变平均时间采样软件达到[10]。图4为具有良好信噪比的多普勒信号和速度直方图。
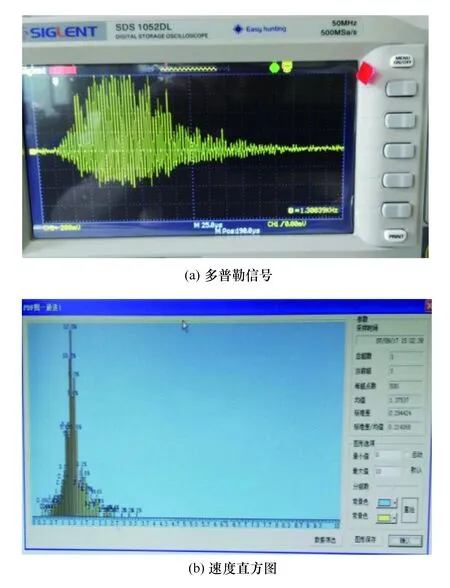
图4 良好的多普勒信号和速度直方图
2 实验测量和数据分析
通过游泳机的流速控制器,可以连续调节水流速度。当调节阀全部打开时,水流速度最大可达1.4 m/s以上。测量坐标系以动力箱出口截面中心点为坐标原点(见图5)。在最高流速下,分别测量了距离出口0.5 m截面上6个测量点的时均速度,各个测量点间距为150 mm,该区域是人体游动的主要区域。结果表明速度分布比较均匀,大体上在1.4 m/s左右。符合设计指标。
为了检验游泳机沿着中心轴线即Z向的速度变化,用LDV和皮托管测量了4 m距离内8个位置的水流速度和湍流度,水流速度U分布结果见图6。时均速度在离出水口3 m范围内比较平稳,变化不大,到3.5 m以后,略有下降。实验中,同时使用皮托管流速计做了测量对比,通过压差得到的水流速度误差很大,没有规律性,证明了皮托管流速计不能用于高湍流度流动。

图5 距离出口Z=0.5 m截面的速度分布
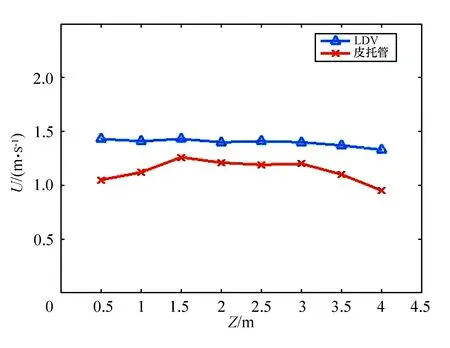
图6 沿游泳机中心轴线的速度分布
水流速度控制特性是游泳机的一个重要技术指标。水流流速是通过改变电液调节阀的控制电压实现的。测量了不同控制电压V下的流速值(见图7),从图7可见,控制特性并非呈线性关系。基于这一特性,就可以进一步作数字化处理,将控制电压直接显示成游泳速度。

图7 游泳机的速度控制特性
图7中还表示了不同速度时的相对湍流度,即脉动速度u的均方根值与时均值之比。随着速度的提高,脉动速度也逐渐增大,从低速0.5 m/s时的不到10%到最高速1.4 m/s时达到25%左右。这样高的湍流度真实反映了游泳机的复杂流场特点。
3 结论
水洞式游泳机是一种新型的游泳健身设备,对于推动全民健康具有重要价值。本文提出的光导管法和测量体反射镜法成功解决了波浪水面对LDV测量的阻碍和后向散射光弱的问题,为游泳机流速标定提供了可靠的依据[11]。这也是对LDV技术应用的创新[12],可推广用于其他具有波浪自由水面场合的流速测量,如大型波槽、船舶航行速度等。
猜你喜欢
科技资讯(2021年2期)2021-03-28
商品与质量(2020年49期)2020-12-16
空气动力学学报(2020年1期)2020-11-29
中国医科大学学报(2020年2期)2020-04-18
中国特种设备安全(2018年10期)2018-12-18
导弹与航天运载技术(2018年3期)2018-07-06
科学与财富(2017年15期)2017-06-03
中国医药指南(2016年20期)2016-01-31
重庆建筑(2015年12期)2015-11-19
国外科技新书评介(2014年5期)2014-12-17
