基于圆锥扫描的W波段毫米波辐射成像系统*
2018-10-11 12:25:38肖泽龙
测试技术学报 2018年5期
逯 暄, 肖泽龙
(1. 山西大学 电子信息工程系, 山西 太原 030006;2. 南京理工大学 电子工程与光电技术学院, 江苏 南京 210094)
0 引 言
毫米波可以穿透烟、 雾、 尘、 霾, 并且具有和白天相同的夜间作业能力, 因此在导航、 遥感、 安检、 环境监测等军民用领域得到了广泛应用[1, 2]. 根据热辐射理论, 不同材料、 不同形状的物体其固有的自然辐射特性存在差异, 这种差异可以被毫米波辐射计接收并转化为电信号, 实现毫米波辐射探测[3]. 通过类似于光学CCD的阵列探测方式或特定的扫描方式, 毫米波辐射成像系统遍历视域内的辐射信号, 并按照空间关系排列而生成图像. 现阶段的扫描方式一般包括电扫描和机械扫描两种. 电扫描与阵列探测不需要机械运动, 扫描速度快、 精度高, 但天线结构复杂, 损耗大, 成本昂贵[4]. 机械扫描通过伺服系统带动天线改变波束的指向, 最少仅需一个辐射测量通道, 成本较低, 容易实现, 但成像时间较长. 受限于国内的毫米波器件发展水平, 单通道机械扫描仍然是目前主流的成像方式[5, 6]. 机械扫描主要分为平面扫描与圆锥扫描两种. 平面扫描一般对直角坐标系的水平与垂直两个维度进行空间采样, 成像范围取决于扫描轨道的尺寸, 成像视域有限[7]. 本文的圆锥扫描毫米波辐射成像系统的空间采样维度是球坐标系的方位角与俯仰角, 视域几乎覆盖整个三维空间.
1 物体在毫米波段的天线温度
(1)
式中:h=6.63×10-34J·s为普朗克常量;f为辐射电磁波的频率;k=1.38×10-23J/K为波尔兹曼常量;T为热力学绝对温度;Bf为黑体谱亮度;λ为波长. 假设有一个有效面积为Ae, 归一化辐射方向图为Fn(θ,φ), 带宽为Δf的单极化天线被温度为T的黑体完全包围, 那么在较窄的天线接收带宽Δf内, 黑体的谱亮度可以被视为常数, 天线接收到的辐射功率为[8]
(2)
式中:θ与φ分别为天线的俯仰角与方位角; dΩ=sinθdθdφ为微分立体角, 积分在整个立体角4π上进行. 根据天线理论
(3)
因此, 式(2)化简为
P=kTΔf,
(4)
这意味着天线接收到的黑体辐射功率与热力学温度成线性关系.
现实世界中的物体用发射率、 反射率、 透射率来定量描述其辐射特性. 根据能量守恒定律, 处于热力学稳定状态的物体发射率ε、 反射率ρ和透射率ζ满足
ε(θ,φ)+ρ(θ,φ)+ζ(θ,φ)=1.
(5)
若有一物体在毫米波段是不透明的, 其视在温度为
Tap(θ,φ)=ε(θ,φ)T+(1-ε(θ,φ))TB,en(θ,φ),
(6)
式中:TB,en(θ,φ)为环境的亮度温度,εT与(1-ε)TB,en分别代表物体自身辐射与反射周围环境辐射对视在温度的贡献. 若采用天线增益为G(θ,φ)的辐射计进行测量, 接收天线波束覆盖区域内各点处的视在温度将被加权为天线温度, 如果将天线的辐射效率近似视为1, 那么物体的天线温度为[9]
(7)
辐射计实际测量到的信号与TA成正比.
2 圆锥扫描毫米波辐射成像系统
如图 1 所示, 本文的圆锥扫描毫米波辐射成像系统主要由主控计算机、 伺服控制器、 二维圆锥扫描转台、 毫米波辐射探测器(辐射计)、 数据采集卡组成[10]. 工作流程为: 主控计算机上开发了与系统配套使用的软件, 可以设置方位维度与俯仰维度的扫描范围与扫描方式, 包括扫描间隔、 速度、 轨迹等, 如图 2 所示, 这些指令由RS232接口发送至转台伺服控制器; 转台伺服控制器将接收到的指令转化为方位电机与俯仰电机角度编码器所需的时序信号, 驱动转台完成二维机械扫描并在扫描过程中将转台的当前位置回传给计算机; 毫米波辐射计被搭载于转台之上, 其天线波束随着转台的移动遍历成像视野, 方位维度的扫描范围可达-160°~+160°, 俯仰维度的扫描范围可达-75°~+75°, 可以看出成像视域几乎覆盖了整个三维空间; 数据采集卡将辐射计测得的信号通过PCI接口实时传回到计算机软件中显示和保存, 以便进行后续图像重构与处理. 系统实物如图 3 所示.
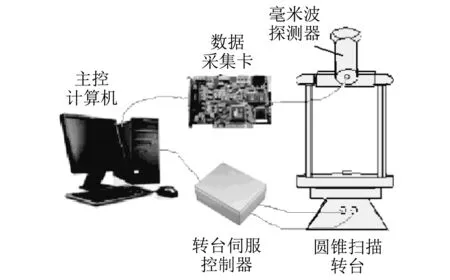
图 1 圆锥扫描毫米波辐射成像系统示意图Fig.1 Block diagram of the conical scanning millimeter wave radiometric imaging system
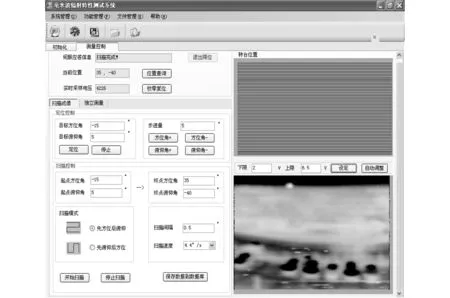
图 2 配套软件的主界面Fig.2 GUI of the supporting software

图 3 系统实物Fig.3 Photograph of the system

图 4 毫米波全功率直接检波辐射计框图及实物Fig.4 Block diagram and photograph for MMW total power direct detection radiometer
毫米波辐射计是成像系统的核心部件, 本文采用的是W波段全功率直接检波体制的毫米波辐射计, 主要由卡塞格伦天线、 射频低噪声放大器(Low Noise Amplifier, LNA)、 平方率检波器、 视频放大器与积分器等部件组成, 原理框图与实物如图 4 所示. 工作过程为: 射频LNA将天线接收到的毫米波辐射能量进行放大后送入平方率检波器进行检波, 检波后的低频信号经过视频放大器和积分器后输出一个电压信号. 该电压信号与式(7)的天线温度成正比, 将其进行数据采集后, 可以在计算机中结合转台的扫描角度进行图像重构以及提取目标特征等后续处理. 在相同的天线尺寸下, W波段比Ka波段具有更高的分辨率; 与超外差体制相比, 直接检波体制的前端不需要本振源、 混频器以及中频放大器, 而是直接对射频低噪放后的辐射信号进行平方率检波, 在体积、 功耗等方面更具优势. 该辐射计的主要技术参数如表 1 所示.
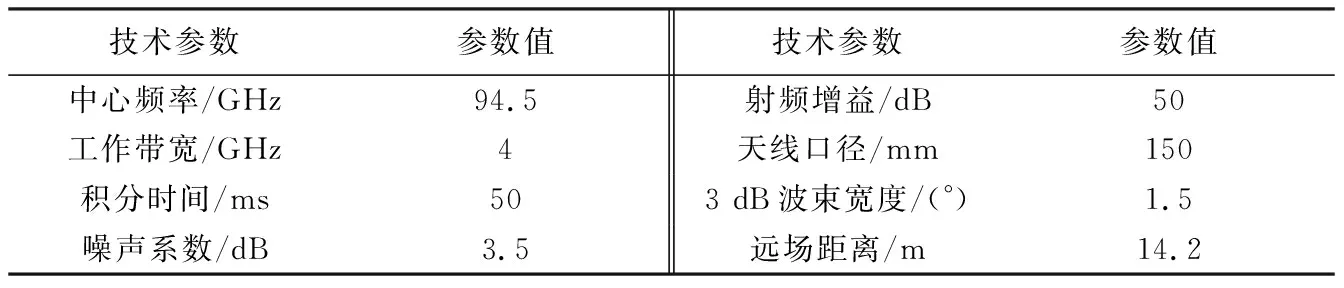
表 1 辐射计的主要技术参数
3 成像实验
3.1 实验内容
为了验证本文系统具备大视域成像的能力, 在室外对图 5 所示的建筑物进行了成像实验, 实验条件如表 2 所示.

图5成像场景光学照片
Fig.5Scene photograph for imaging experiment
表2成像实验的主要实验条件
Tab.2Main conditions for imaging experiment

实验条件参数值天气晴朗(“冷空”背景)环境温度/℃13(290 K)成像距离/m~15(满足远场条件)方位角扫描范围/(°)-30~ 40方位采样间隔/(°)0.1仰角扫描范围/(°)40~ 80俯仰采样间隔/(°)0.5
本文辐射计的3 dB天线波束宽度约为1.5°, 由奈奎斯特空间采样定理可知空间采样间隔不能超过0.75°, 即一个3 dB波束宽度内应至少采样两次. 根据机械扫描的特点, 在某个维度去程或回程中, 硬件的物理状态保持不变, 伺服转台能够承受较快的扫描速率, 而去程与回程、 或回程与去程的转换过程涉及硬件的启停, 转换太快会导致机械损坏, 这也是机械扫描耗时的主要原因. 由于本文的场景在方位维度的跨度比较大, 因此把方位向设置为去程与回程方向, 采样间隔采用较小的0.1°用来观察细节; 将俯角方向设置为去程回程转换的方向, 采样间隔设置为0.5°, 以减少整幅图像的采集时间.
在每一个伺服控制的空间采样位置, 数据采集卡都会向计算机传递一个毫米波辐射计输出的电压值. 对于本文的圆锥扫描体制, 空间采样的两个维度是方位角和仰角. 将各个空间采样点的辐射计输出根据线性定标函数转化为天线温度, 并按顺序排列到方位角与仰角张成的空间中, 得到成像场景原始的圆锥扫描毫米波辐射图像如图 6 所示. 其中, 横坐标代表方位角, 范围-30°~ 40°, 纵坐标为仰角, 采样范围40°~ 80°, 成像视域大; 天线温度的大小用伪彩色表示, 整个场景的实测值大约分布于50~290 K之间.
3.2 结果分析
分析观察图6可以得出:
1) 天气晴朗时, 位置1处天空呈现了最低的辐射温度, 约为50°, 整个场景处于“冷”空照射中.
2) 墙壁的反射率较低而发射率较高, 根据式(6), 位置2辐射温度较高, 约为250°.
3) 位置3处窗户的金属框架反射率接近1, 由于反射了“冷”的天空温度, 与墙壁背景形成了较为明显的辐射温度对比.
4) 金属框的宽度只有5 cm左右, 而探测距离15 m处的天线波斑直径约为15 m×15°/180°*π=0.39 m. 当天线波束扫到金属框时, 根据式(7), 天线波束内墙壁背景高的视在温度也被加权积分, 因此位置3的辐射温度比天空温度高. 在金属框架更加密集的位置4, 被加权积分的墙壁温度较少, 因此位置4的辐射温度比位置3更低. 式(7)的加权效应还体现在位置5处, 天空和建筑物边界的过渡带比较宽.
5) 随着仰角的减小, 建筑物墙壁的辐射温度逐渐升高. 这是由于天空温度随天顶角的增加而升高, 位置6与位置2相比, 反射的天空温度更高.
6) 建筑物呈现在原始图像中的形状与人眼视觉相比存在非线性畸变, 当扫描范围较大时, 这种畸变比较明显. 根据球坐标系与直角坐标系之间的转换关系, 这种畸变是可以矫正的.
4 结 论
毫米波辐射计可以测量物体固有的自然辐射特性, 通过探测不同物体之间辐射特性的差异, 进行目标检测与识别. 将单通道毫米波辐射计搭载于机械扫描伺服系统, 使其天线波束进行空间扫描, 可以获得被测场景的毫米波辐射图像. 圆锥扫描的两个采样维度是球坐标系的方位角与俯仰角, 这种扫描方式具备大视域成像的能力, 使用范围更广. 缺点是原始图像存在非线性畸变, 特别是当成像视域较大时, 畸变比较明显. 由于畸变产生的原因是采用了与人眼习惯不同的球坐标空间采样, 因此可以通过坐标变换将这种畸变进行校正.
猜你喜欢
电子技术应用(2021年12期)2021-12-22 07:08:26
上海航天(2021年3期)2021-07-21 14:02:12
卷宗(2021年2期)2021-03-09 07:57:24
空间科学学报(2020年3期)2020-07-24 09:23:32
空间科学学报(2020年4期)2020-04-22 01:17:04
成都信息工程大学学报(2018年1期)2018-05-31 08:40:27
铁道通信信号(2018年2期)2018-04-18 12:18:36
系统工程与电子技术(2016年7期)2016-08-21 13:58:56
河南科技(2015年18期)2015-11-25 08:50:14
电测与仪表(2014年2期)2014-04-04 09:04:10