
震区牛圈沟不稳定斜坡灾害原位监测与数据处理
2018-10-10 05:23陈建坤
世界有色金属 2018年14期
陈建坤
(湖南有色新田岭钨业有限公司 湖南 郴州 423000)
1 不稳定斜坡监测数据获取
1.1 监测内容与方法
震中不稳定斜坡位于汶川县映秀镇牛圈沟飞鱼咀对面(即二号拦砂坝右侧),为一土砂质不稳定斜坡,滑坡在地貌上呈北向U形凹地,纵长约70m,宽约30m,上侧以滑坡后沿山体为界,左右两侧以山体丛生灌木为界,下部以公路为界,滑体总面积2000m2,一旦发现滑坡会阻断道路,阻塞河道,影响人们的正常的生活。
本控制网平面坐标外业观测采用中国中海达测绘公司生产的HD8200G单频GPS接收机6台,观测方法采用静态相对定位的方法进行野外数据采集。
控制网高程坐标采用日本生产的拓普康GTS7501全站仪进行测量,具有许多特性和特点:高精度且实际精度远高于标称指标,该全站仪测角精度为1″,标称测距精度为2mm+2ppm,一般气象条件下的测程为3000m。
坡体形变监测点平面坐标采用日本生产拓普康GTS-102型全站仪进行观测,高程采用莱卡NA720光学水准仪进行观测。
1.2 主要精度指标
震区牛圈沟不稳定斜坡要求按《全球定位系统(GPS)测量规范》的C级GPS点布设。
国家水准网布设成一等、二等、三等、四等4个等级。现用的水准测量规范为:GB/T 12897-2006《国家一、二等水准测量规范》与GB/T 12898-2009《国家三、四等水准测量规范》。工程上常用的水准测量为:三、四等水准测量;等外水准测量。
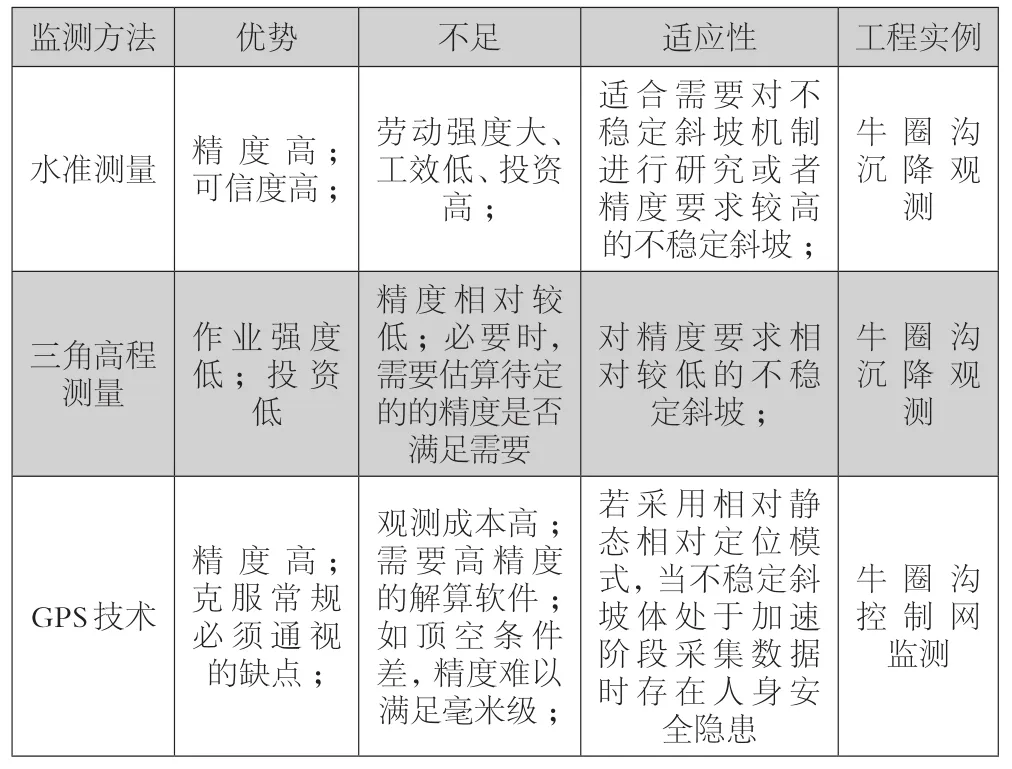
表1 常用地表不稳定斜坡垂直位移监测方法各自特点
1.3 控制网点布设
牛圈沟飞鱼咀对面不稳定斜坡的控制网遵守布设原则布设为了6个点,其中D03,D04为基准点,其它控制点分别为D05,D06,D07,D08。
1.4 控制网施测
(1)GPS测量:
GPS控制网外业观测时,作业人员应参照静态观测基本作业技术要求来执行。天线对中误差不应大于3毫米,基座圆水准气泡必须居中,观测前后在天线互为120°方向上量取天线斜高,互差应小于5毫米。开机后把测站相关信息输入GPS接收机并做外业观测记录。牛圈沟局部控制网采用4台中海达GPS同时段测量,由于牛圈沟地形复杂,开机时间不少于2小时。
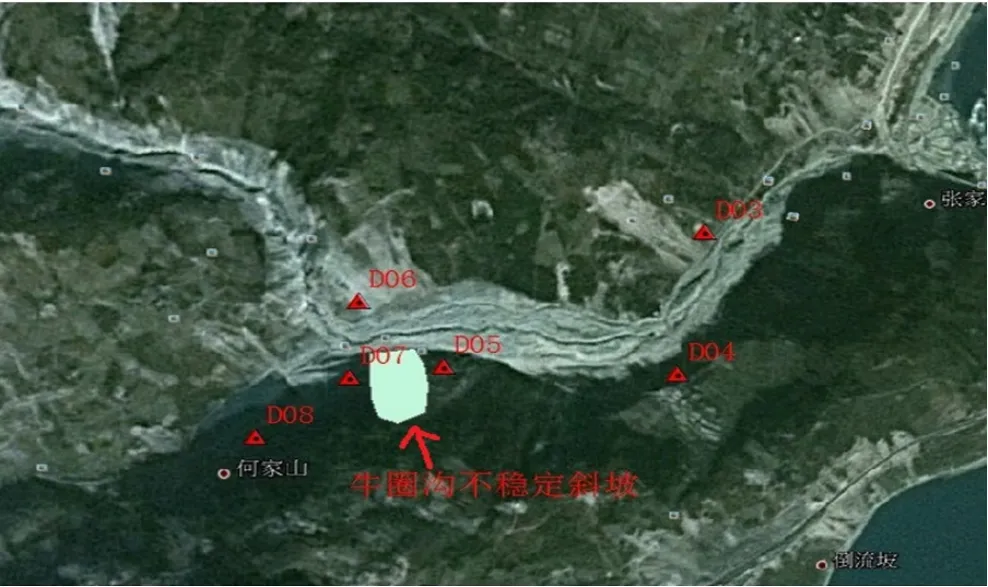
图1 牛圈沟飞鱼咀对面不稳定斜坡控制网布设图

图2 震区牛圈沟不稳定斜坡外观变形监测点布置图
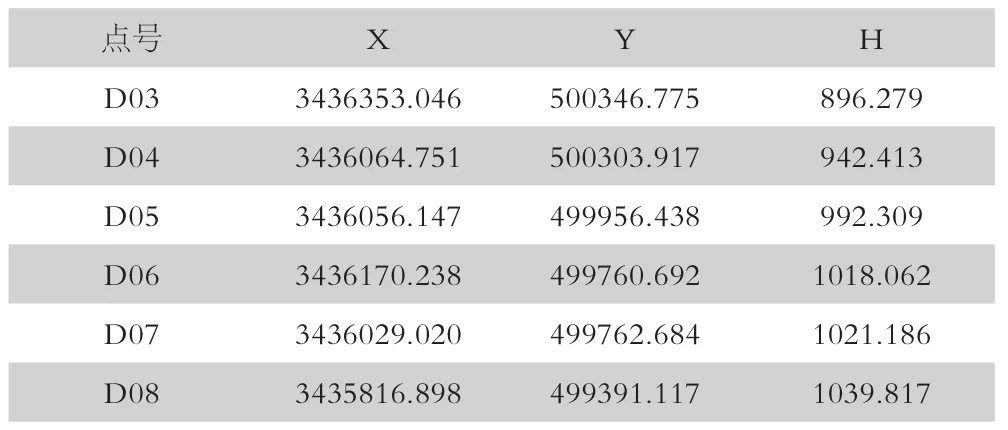
表2 控制网点坐标
(2)全站仪对向三角高程测量的原理
对向观测又称为往返观测,其观测原理与单向观测相同。将全站仪置于A 点,棱镜置于B 点,测得A、B 两点间的高差hAB,hAB称为往测高差;再将全站仪置于B 点,棱镜置于A 点,测得B、A 两点间的高差hBA,hBA称为返测高差。往返两次观测高差的平均值即可作为最终的测量结果。往测计算公式:

返测计算公式:

式中:S往、S返、α往和α返分别为往返观测的斜距和竖直角,i往、i返、v往和v返分别为往返观测的仪器高和棱镜高,K往和K返分别为往返观测时的大气折光系数。在全站仪进行往返测量时,如果观测是在相同气象条件下进行的,特别是在同一时间进行,则可假定大气折光系数对于反向观测基本相同,因此。又和同是A、B两点间的平距,也可认为近似相等,即有:

从式(1)、(2)可得对向观测计算高差的基本公式为:

式中符号意义同前。
因此,在气象条件稳定时,全站仪对向三角高程测量可以不考虑地球曲率及大气折光系数的影响,与单向观测相比有明显优势。
1.5 形变监测点布设
牛圈沟宜使用方格网型,方格网型为在不稳定斜坡体范围内,多条纵向、横向测线近直交,组成方格网,测点设在测线的交点上(也可加密布设在交点之间的测线上)。这种网型测点的分布的规律性强,且较均匀,监测精度高,适用于不稳定斜坡体地质结构复杂,或群体性不稳定斜坡体。
1.6 形变监测点施测
布桩采用大铁锤把木桩打入监测点位置中,并用小铁锤打进木桩中,并同时反复用钢卷尺测量桩高,使它控制在10cm。由于钢卷尺的精度不高,经过实地测量操作,方法可行。
牛圈沟飞鱼咀对面不稳定斜坡应采用前方交会法,在D06号点架全站仪,对后视点D05,检验误差精度,前视点为各桩号点,观测各桩号点的坐标。高程观测采用精密莱卡NA700水准仪配合5米塔尺从D07号引高程,用联测方法测量上中下各两排木桩,其中测量为A,B,E,F,H,I排。通过全站仪与水位仪测量的高程对比,解算出高差。
2 不稳定斜坡监测数据处理
2.1 GPS数据处理
牛圈沟闭合导线数据处理结果
X、Y坐标以牛圈沟D03、D04为基准解算闭合导线数据结果为准,高程H用以牛圈沟D03、D04为基准的GPS数据结果为准。
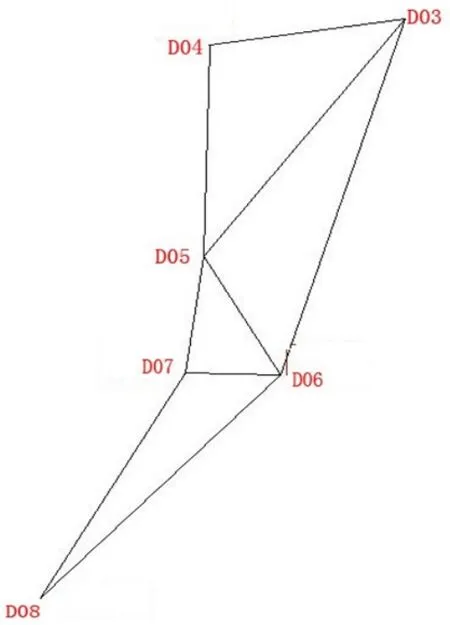
图3 震区牛圈沟不稳定斜坡控制网
2.2 三角高程数据处理
全站仪对向三角高程测量的中误差:
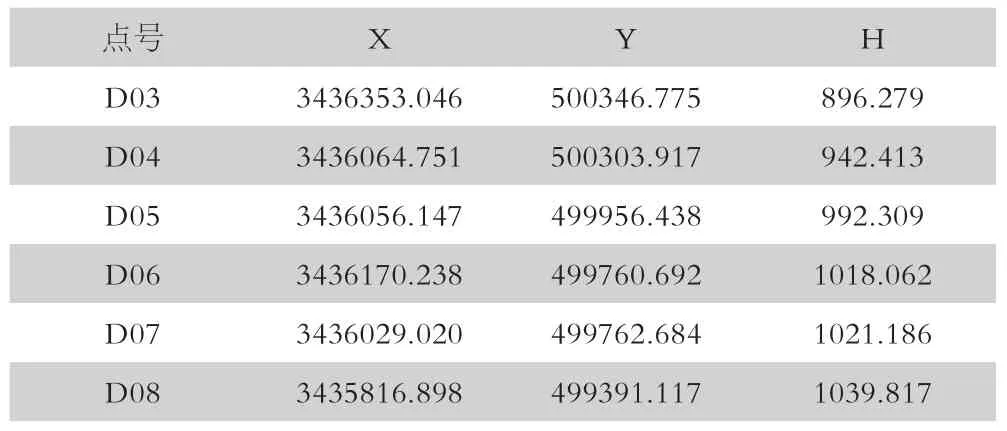
表3 数据融合最终结果控制网点坐标

表4 形变监测点坐标数据结果

表5 区不稳定斜坡桩位水准测量
根据误差传播定律,由公式(2.4)进行微分,并转变为中误差关系式,则式(2.4)可变为:

式中:mh为往返观测平均高差中误差,mS往、mS返、mα往和mα返分别为往返斜距和坚直角中误差,mi往、mi返、mv往和mv返分别为往返仪器高和棱镜高量取中误差,其他符号意义同前。由于仪器和观测条件相同,可取mα往=mα返=mα,mS往=mS返=mS,S往=S返S,mi往=mi返=mv往= mv返=m,α往=α返=α。于是式(3.5)可简化为:

对式(3.6)进行开平方,则:

三角高程数据采用南方平易2005软件进行数据处理,最终获取合格的高程数据结果。
2.3 数据融合
对GPS和三角高程数据的处理结果进行融合,平面坐标以GPS处理出来的X、Y坐标为准,高程坐标H以三角高程处理处的结果为准,最终得到控制点的精确坐标。如图所示:
2.4 监测点平面坐标数据处理
对照《桩号点号观测对照表》,将全站仪获取的每个形变监测点的3个坐标挑选出来,统一汇总好,再将其录入Excel表格,编辑公式,求解出形变监测点坐标的平均值,再将其平面坐标提取出来即可,如下表所示
2.5 监测点水准高程数据处理
水准测量外业式作结束后,要检查手簿,再计算各点间的高差。经检核无误后,才能进行计算和调整高差闭合差。最后计算各点的高程。
2.6 不稳定斜坡体形变数据处理
不稳定斜坡体整体流域因地震,水流等因素的影响会产生形变,对其整体的地形改变量测量具有重要意义。将所获取的地形数据导入南方CASS7.0数据处理软件,按照草图上所画的区域和标记的点号,用复合曲线画好滑坡的边界线,然后在图面上生成三角网和0.5米等高距的等高线,生成不稳定斜坡的大比例尺地形图。
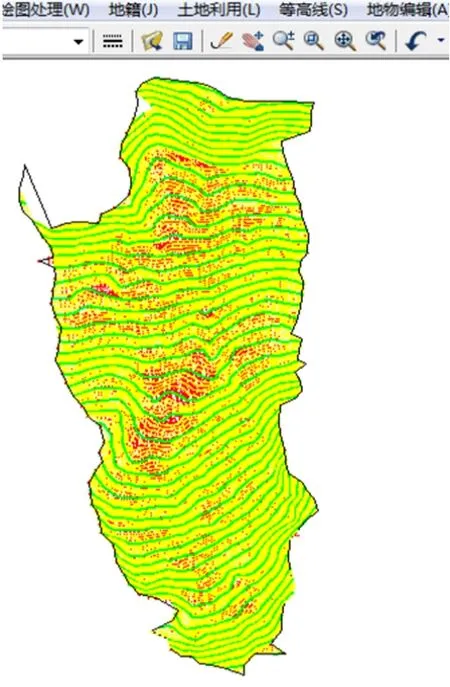
图4 震区牛圈沟不稳定斜坡1:100大比例尺地形图
3 结论
(1)利 用GPS、GPT-102全站仪,建立野外控制网和观测站点,绘制大比例尺地形图,可以实现对震中不稳定斜坡进行动态监测。
(2)将牛圈沟飞鱼咀对面的不稳定斜坡( 即D05~D07控制点之间的不稳定斜坡)确定为首批实施重点监测对象是正确的,监测设计基本原则合理,监测手段及监测技术切实可行,行之有效。
(3)监测实施过程可以分为仪器埋设与安装、现场观测、资料处理与分析、信息反馈及预测预报等5个基本环节来完成,它们对于掌握和认识各不稳定斜坡体的稳定性性状缺一不可。
(4)监测成果与不稳定斜坡现场宏观特征相符,说明监测成果的可靠性和科学性;另外,在已获取各类监测资料的基础上,信息反馈必须及时、准确即时应重视和加强资料的综合分析、管理和预测预报工作。
猜你喜欢
煤气与热力(2021年10期)2021-12-02
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
装饰装修天地(2020年11期)2020-07-04
河南畜牧兽医(2020年9期)2020-01-11
廉政瞭望(2019年14期)2019-11-18
廉政瞭望·下半月(2019年7期)2019-09-10
铁道标准设计(2018年12期)2018-11-22
铁道勘察(2018年5期)2018-10-22
现代职业教育·中职中专(2016年4期)2016-10-21
