机载激光测量系统在地质灾害中的应用
2018-10-09 03:05彭劲松周光明
测绘通报 2018年9期
彭劲松,许 俊,李 娟,周光明
(1. 湖南环境生物职业技术学院,湖南 衡阳 421005; 2. 武汉海达数云技术有限公司,湖北 武汉 430023)
机载三维激光雷达扫描测量(简称机载LiDAR)是一种利用传感器所发出的激光测定传感器与目标之间距离的主动遥感技术。根据LiDAR的载体平台,可分为星载、机载、车载和地面4大类。其中,机载LiDAR系统因无人机的迅猛发展而应用最为广泛。
LiDAR技术是近年来迅速发展并可有效快速获取高精度地形、地貌数据的有效手段。由于激光可以透过植被缝隙到达地表,因此机载LiDAR系统可快速获取到森林覆盖地区地表高程信息。本文将重点介绍机载LiDAR的系统组成及区别于传统遥感手段的优势,并结合鲜水河断裂带项目的数据获取、处理和信息提取来进一步说明机载LiDAR的优势。
1 机载LiDAR系统组成和优势
1.1 系统组成
机载激光雷达测量系统设备主要包括3大部件:激光扫描仪、航空数码相机、定位定姿系统(包括GNSS和IMU)。其中机载激光扫描仪主要获取三维激光点云数据,同时记录回波强度及波形;航空数码相机通过拍摄采集航空影像数据;定位定姿系统记录测量设备在每一瞬间的空间位置与姿态,由GPS确定空间位置,IMU惯导测量仰俯角、侧滚角和航向角数据。机载LiDAR利用激光器发射激光,从GPS得到激光器的位置,从INS得到激光发射方向,即可准确地计算出每一个地面光斑的坐标(X,Y,Z)。激光束发射的频率可以从每秒几个脉冲到每秒几万个脉冲。一般而言,LiDAR系统获取到的点云数据在每平方米1~100不等,由载体飞行器速度、激光脉冲频率综合决定。如图1所示。
1.2 机载LiDAR技术优势
与传统的遥感手段相比,机载LiDAR技术具有以下优势:①可穿透植被。LiDAR对植被的穿透能力可有效地去除植被覆盖对地面高程测量的影响,增加了对地面数据的有效测量,大大提高了测量精度。②主动非接触测量。与光学遥感相比,机载LiDAR技术不限于单一光照,不受阴影和太阳高度角的影响,在传统摄影测量方式无能为力的山区和植被等阴影地区,不会影响到测量数据的精度。③远距离高精度三维测量。机载LiDAR系统可以对传统手段束手无策的植被覆盖茂密地区、沙漠、滩涂地及高差较大的地形复杂地区等进行远距离测量获取高精度DEM数据。④直接连续定位测量。在机载LiDAR系统进行测量过程中同步进行地面点连续GPS定位和机载GPS系统差分处理,获取的数据具有真实的地理坐标,是对地表三维坐标进行直接测量;相对传统摄影测量手段通过间接方法获取的数据更加高效和准确。
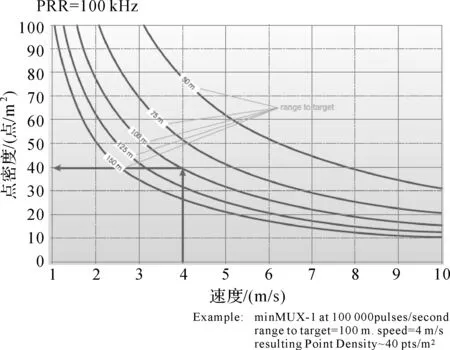
图1 点密度计算
2 项目简介
鲜水河断裂带位于青藏高原东南缘的四川西部地区,是一条北西走向的弧形左旋走滑断裂带。本次主要选取了鲜水河断裂带上两个典型的区域进行激光雷达点云数据采集,其位置分别为康定市孟庆村、甘孜县庭卡乡,测区海拔高、人工测量难度大、少量植被且测区中间被河水分割为两部分。采取机载激光雷达扫描方式可以一站式快速获取到测区的三维激光点云数据,对点云进行快速处理即可得到测区1∶2000的DEM数据。项目使用武汉海达数云技术有限公司集成的ARS-200轻型机载激光测量系统,该系统有重量轻、精度高的特点,系统技术参数见表1。
3 数据处理
数据处理的主要内容包括以下几个方面:
(1) 定位定姿数据处理。根据差分GPS原理,利用地面基站GPS静态数据和机载飞行平台动态GPS数据联合解算得出飞行轨迹的三维坐标,将平台系统上的INS数据利用GPS时间同步结合到三维轨迹信息上,得到具有激光扫描仪瞬时位置和姿态信息的飞行轨迹。
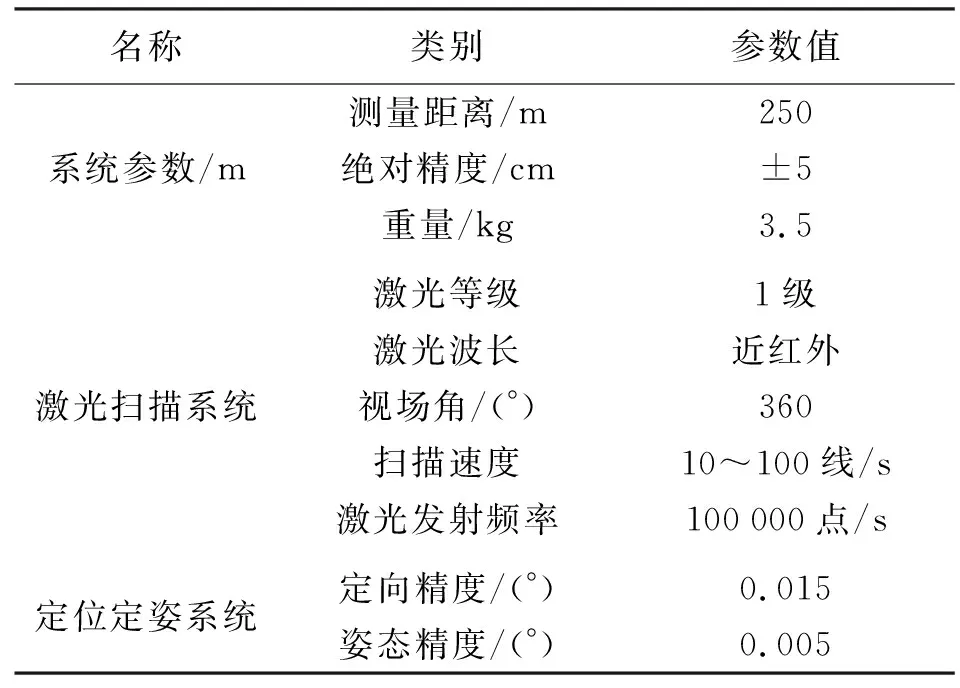
表1 使用设备技术参数
(2) 激光扫描数据处理。根据得到的200 Hz高频的瞬时位置和姿态信息结合激光扫描数据,加入系统误差改正参数和坐标投影参数,求出具有WGS-84三维坐标的点云数据。
(3) 航带拼接。将每条航带点云数据与参考面数据进行比较,对点云进行航带平差校正。航带偏移小于限差后,再进行航带拼接。
(4) 激光点云数据分类。根据点云的几何信息、反射强度等对地面点和非地面点进行分离,并根据实际应用的需求对非地面点进行进一步分类。
(5) 数字高程模型和数字表面模型等地形成果产品生成。
4 信息提取
(1) 康定市孟庆村测区内平均海拔2600 m,测区面积约0.1 km2。三维坐标数据原始点云密度可到达80点/m2,经过地表点过滤后点云密度10点/m2。将地表三维点云数据通过构TIN不规则三角网的方式生成数字高程模型。如图2、图3、图4所示。

图2 测区1原始点云数据
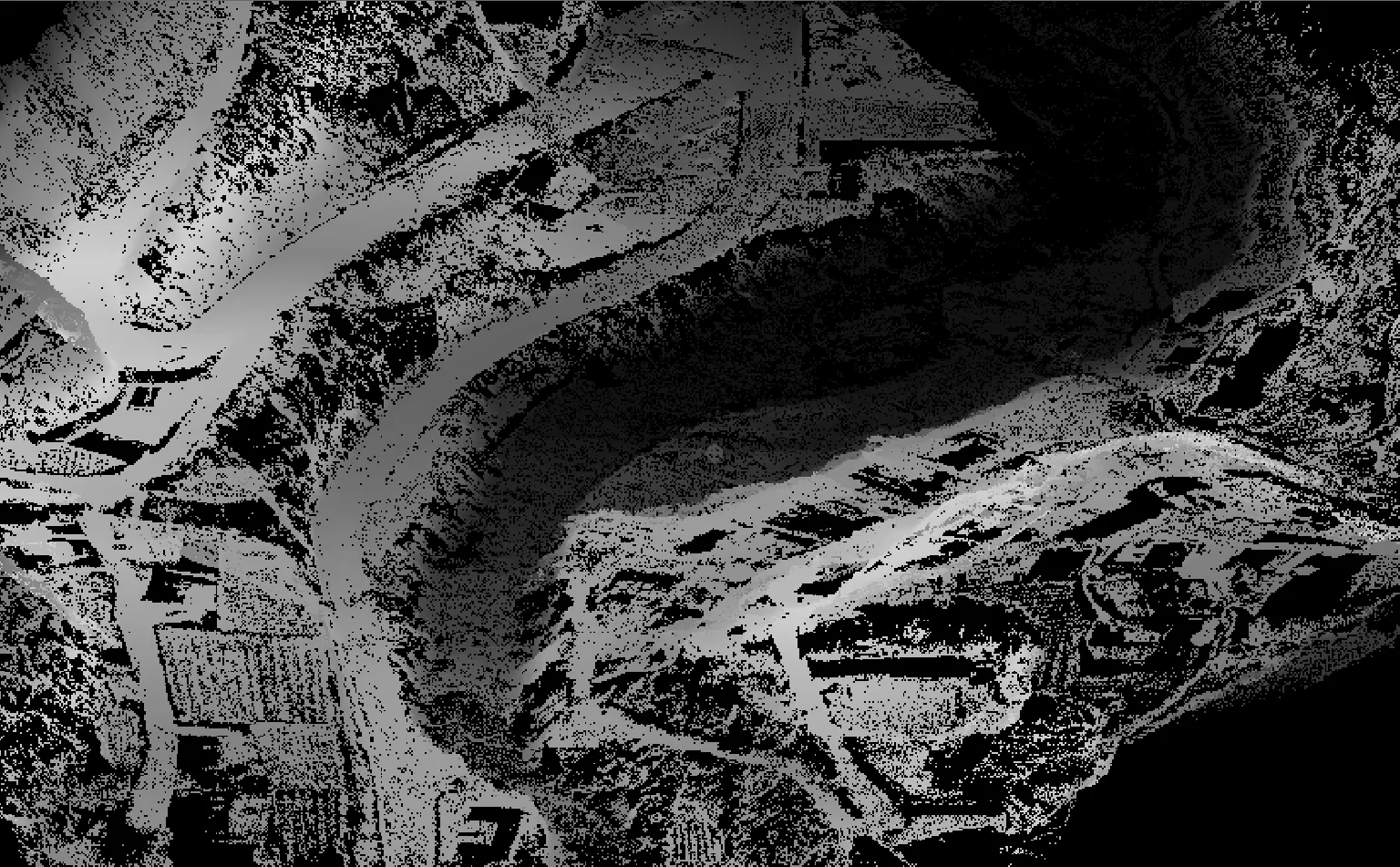
图3 测区1过滤后点云数据
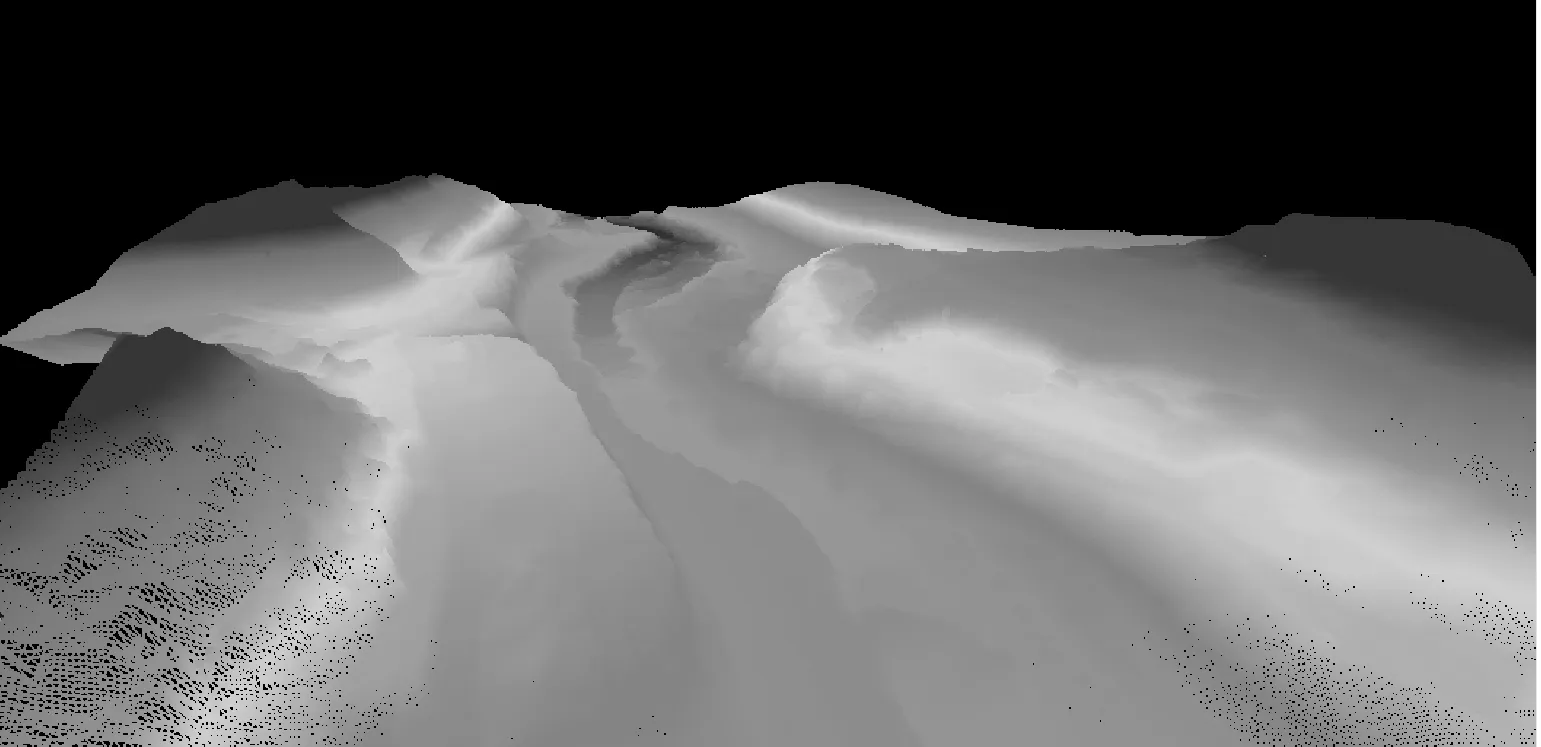
图4 测区1构造TIN网格(1 m间距)
(2) 甘孜县庭卡乡测区内平均海拔3400 m,测区高差约70 m,测区面积约0.15 km2。3400 m海拔已经具备高原特性,无人机飞行需要更换高原桨才可以继续安全作业,在高原上相对于低海拔的区域作业无人机的续航能力也会有所降低。获取到测区的三维坐标数据原始点云密度为75点/m2,经过地表点过滤后点云密度10点/m2。将地表三维点云数据通过构造TIN不规则三角网的方式生成数字高程模型。数据成果如图5、图6、图7所示。
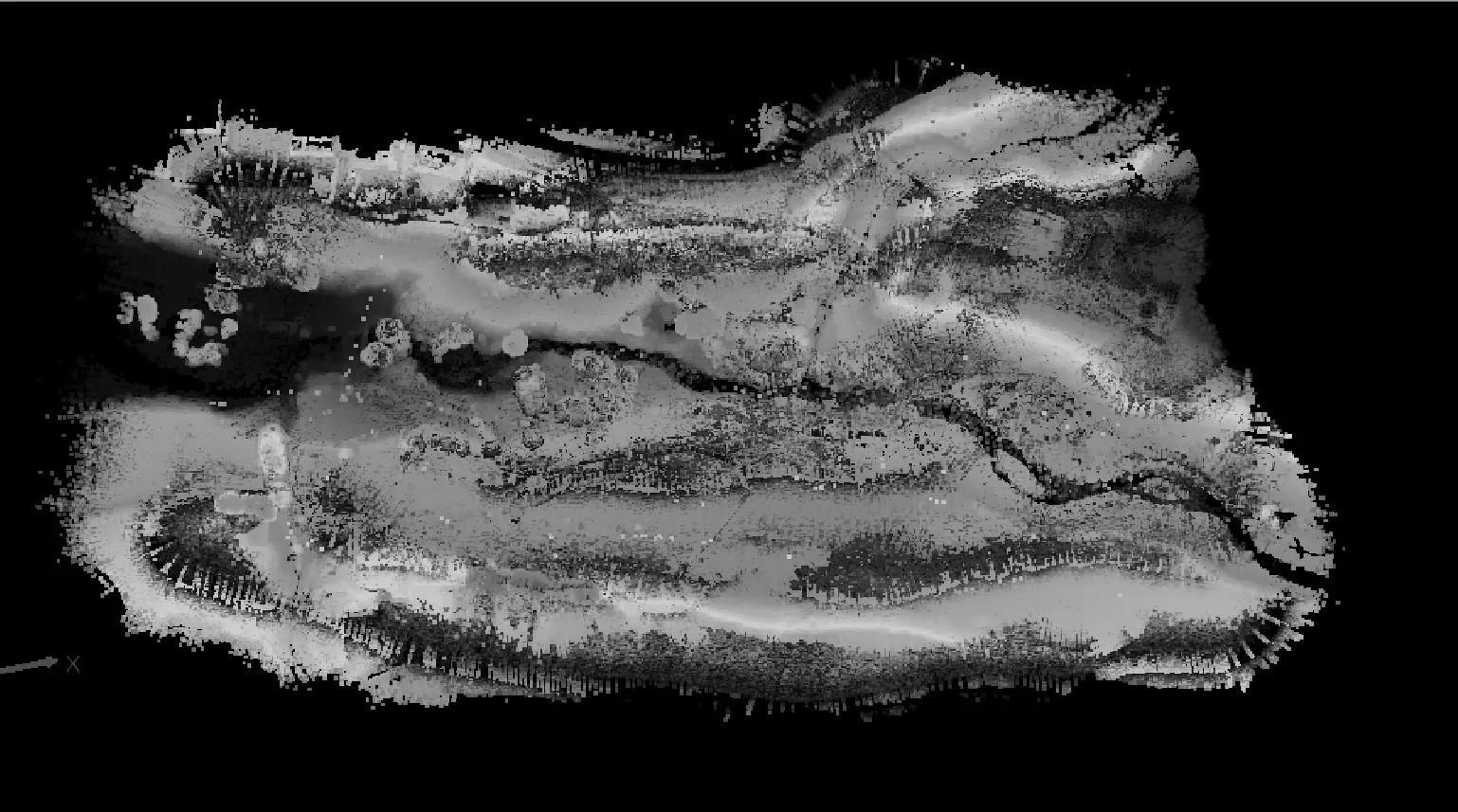
图5 测区2原始点云

图6 测区2过滤后点云数据
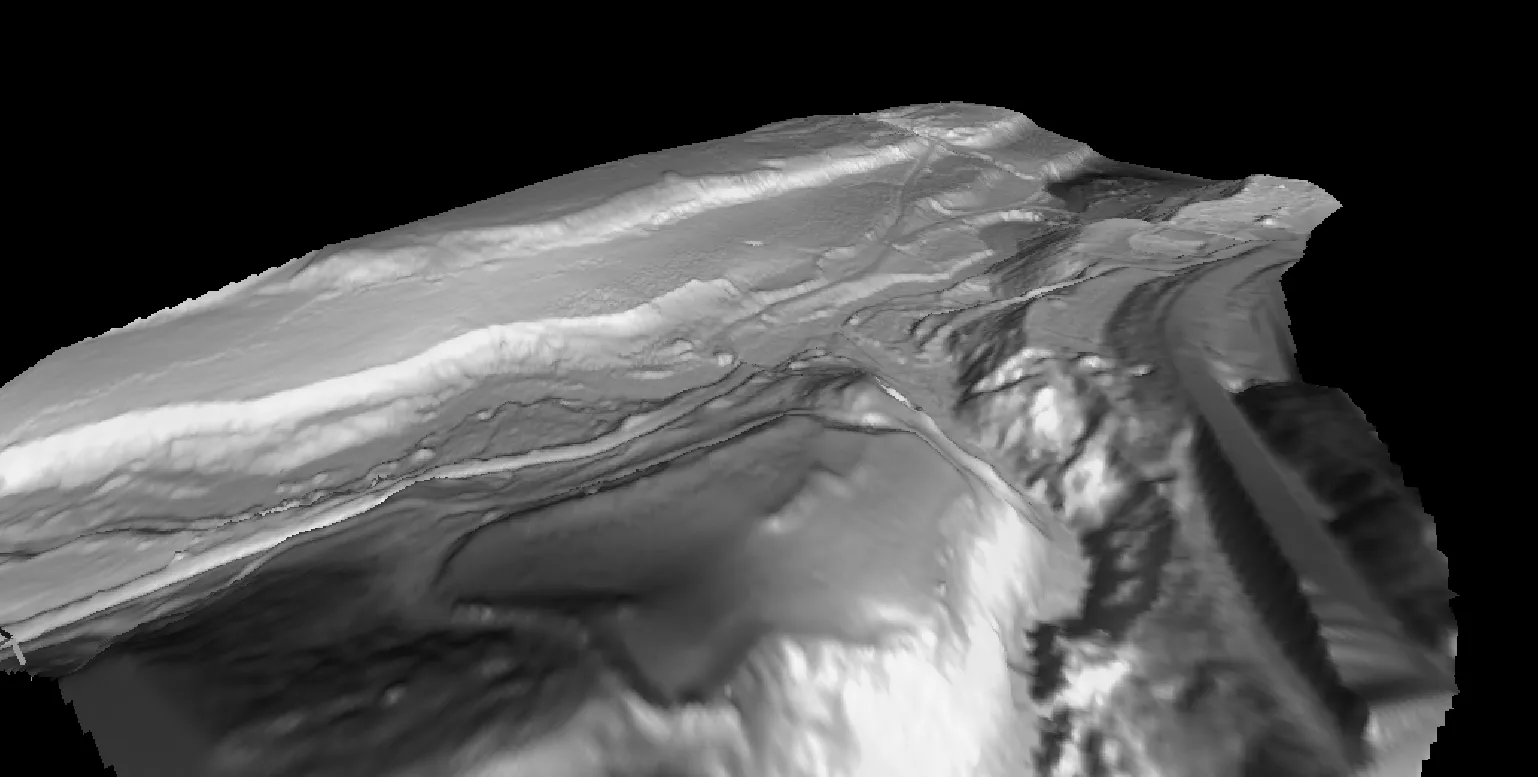
图7 测区2构造TIN网格(1 m间距)
5 结 语
机载激光雷达系统以其高精度、高密度、高效率、产品丰富等特点在地质灾害区域应用方面有着得天独厚的优势,特别是无人机激光测量系统可对人工无法到达或危险性比较大的区域进行测量工作,其局限性从总体上来讲要小于传统航空摄影测量,将逐步成为测量业界应用较广、较先进的测绘方法。
猜你喜欢
北京测绘(2022年5期)2022-11-22
山东煤炭科技(2022年6期)2022-07-14
汽车观察(2021年8期)2021-09-01
昆明医科大学学报(2021年6期)2021-07-31
河北地质(2021年4期)2021-03-08
科学(2020年5期)2020-11-26
中国铁道科学(2019年5期)2019-10-19
小哥白尼(趣味科学)(2019年2期)2019-04-17
中国交通信息化(2019年1期)2019-03-26
测绘通报(2018年10期)2018-11-02