
移动激光扫描技术结合天宝Realworks在公路测设中的应用
2018-10-09 03:05:40武少丰杜洪涛
测绘通报 2018年9期
武少丰,杜洪涛
(1. 河南中原公路勘察设计有限公司,河南 濮阳 457000; 2. 北京麦格天渱科技发展有限公司,北京 100043)
三维激光扫描测量系统也称为三维激光成图系统,主要由三维激光扫描仪和系统软件组成,其工作目标就是快速、方便、准确地获取近距离静态位图的空间三维模型,以便对模型进行分析和处理。激光扫描仪所获得的数据是由离散的三维点构成的点云。点云的每一个像素包含一个距离值和角度值,三维激光扫描技术获取的点云数据,可以达到毫米级的采样间隔,从而使激光扫描技术可以用于工程测量、建筑测量、数字城市等领域。随着科技的发展,地面静态三维激光扫描技术日渐趋于成熟,大大提高了测量数据的完整性和成果应用的丰富性。本文主要涉及采用ZEB-REVO移动扫描仪、高精度SLAM移动扫描系统、点云编辑与成果系统、TBC通道模块进行道路设计。
1 系统组成
1.1 高精度SLAM移动扫描系统
同步定位与制图(simultaneous localisation and mapping,SLAM)技术能够通过对周围世界的探测,逐步描绘出环境地图,并确定自身所处的位置,本项目所用设备为ZEB-REVO移动扫描仪,硬件由电源系统、数据控制与存储系统、激光器和IMU惯性导航单元组成。
1.2 点云编辑与成果生成系统
点云编辑与成果生成系统主要为Trimble RealWorks软件,可以实现对GeoSLAM所生成点云的坐标转换、编辑取样,获得DEM高程模型等数字化成果。
1.3 TBC通道模块进行道路设计
运用TBC通道模板创建道路水平定线,创建定线时TBC提供多种方式:导入设计CAD数据、在TBC中绘制一条三维折线、手动输入定线参数等。道路断面模板里设置路面、路肩、边坡、排水沟、护坡等道路设计要素,进而快速、准确地完成道路设计。
2 项目应用分析
2.1 测区概况
G106至S209公路改建工程起点位于G106线上,终止S209线上。建设里程3.625 km;其中新建段0.915 km,加宽改建段2.710 km。该道路主要服务于沿线各村的生产、生活需要。现有道路修建等级较低,路面结构较为薄弱,随着沿线经济发展、交通量急剧增加,现有路面宽度已不能满足车辆通行的需要,致使道路通行能力降低。近年来,经济发展同样也带动交通的发展,为了适应经济发展,服务沿线农业和农村建设,拟对本道路进行改扩建。
项目测区为一段需要单侧扩建的乡村水泥路,原始路面宽度为5 m,现需要将道路右侧(南侧)加宽至9 m。扩建路段全长2710 m,沿途跨过4条旱河,在设计扩建方案时,需要考虑沿途桥梁与涵洞,进行三维激光扫描,可以生成高精度实景点云模型进行三维分析。
2.2 三维激光扫描外业流程
2.2.1 控制点布设
本项目共做两组测试,第1组测试每400 m做一次闭合扫描,将测区分为4个区段,共布设5个控制点,如图1所示;第2组测试每200 m做一次闭合扫描,将测区分为8个区段,共布设9个控制点,如图2所示。
为了提高控制点布设效率,现场使用定制靶球,将对中杆、标靶球和GPS接收机集成于一体,只需要准备两套即可。在单段扫描时将两套靶球分别放置在首尾处。当第一个区段扫描结束后,将首端处的靶球转移到下一段的末端,而尾端处的靶球作为下一区段的首段控制点保持不动。通过对GPS坐标的计算,可以得到靶球的球心坐标,如图3所示。

图1 测试1分段扫描示意图
2.2.2 区段扫描
由于SLAM算法的本质是特征匹配,为了获得精度更高的点云数据,在外业扫描时需要尽可能地形成闭合环。同时两次区段扫描需要有足够的重叠部分。本次项目的两次测试都采用了“8”型扫描路线,以下为两种比较好的策略,如图4、图5所示。

图5 策略2:区段中心为初始化点
2.3 数据处理
2.3.1 点云提取
数据处理首先使用该系统配置软件将SLAM数据和IMU数据融合,生成通用格式的点云数据。在处理时需要对软件的参数进行调节。
2.3.2 点云拼接
点云拼接是依据重叠部分的点云特征将两段数据拼接起来,这一步操作时应将缩放参数定义为1。即使两个扫描区段在重叠区域获取的点云存在形态差异也应原状保留,作为后期精度分析的参考因子。
GeoSLAM自带的惯导单元能够保证数据成果的高程轴正确,因此在拼接之前要在TRW中将所有点云文件设置为“已整平测站”,这样能保证两段数据拼接时高程轴锁定,被移动的点云参考基准点云做4参数变换(3个平移量,一个绕高程轴的旋转量),相对于不锁定高程轴时的6参数变化来说成果精度更高。
2.3.3 地理坐标系转换
地理坐标系转换是通过对现场的标靶球赋予绝对坐标,实现点云成果的坐标定义。先将GPS的坐标信息通过高程值改正转换成靶球中心坐标,直接导入TRW点云处理软件中。在TRW软件中提取靶球,并为其选择对应的控制点。本项目所有靶球目标均在同一款软件(TRW)中依据同一款硬件设备(GeoSLAM)获取的点云来拟合,两个230 mm直径的靶球制作工艺严谨,拟合误差均小于1 cm,较为稳定。因此认为靶球的拟合误差为系统误差,本次分析地理坐标转换残差时,对靶球拟合精度忽略不计。
表1、表2为两次测试对应的地理坐标转化残差。残差值是在地理坐标转化时,控制点实际位置与点云中靶球位置的斜距。对数据精度评价有着很大的参考意义。通过控制点转换残差表可以得出,当区段为200 m时,使用GeoSLAM获取的点云精度比区段为400 m时更高。
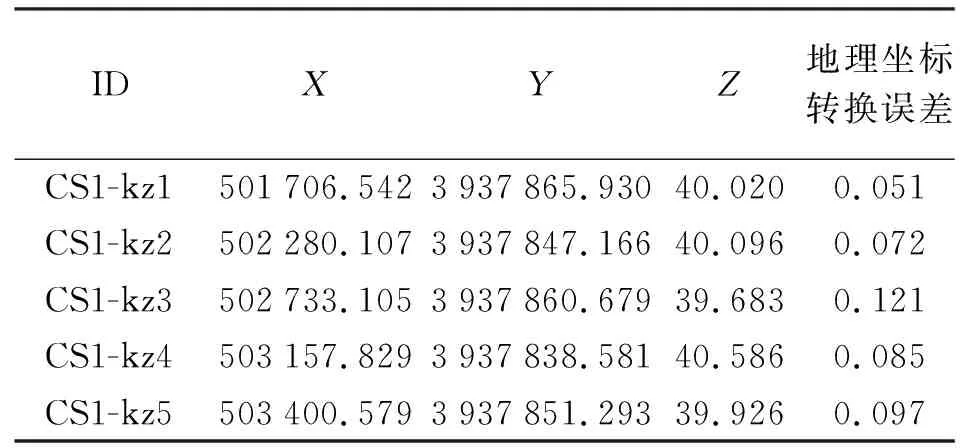
表1 测试1地理坐标转换控制点残差
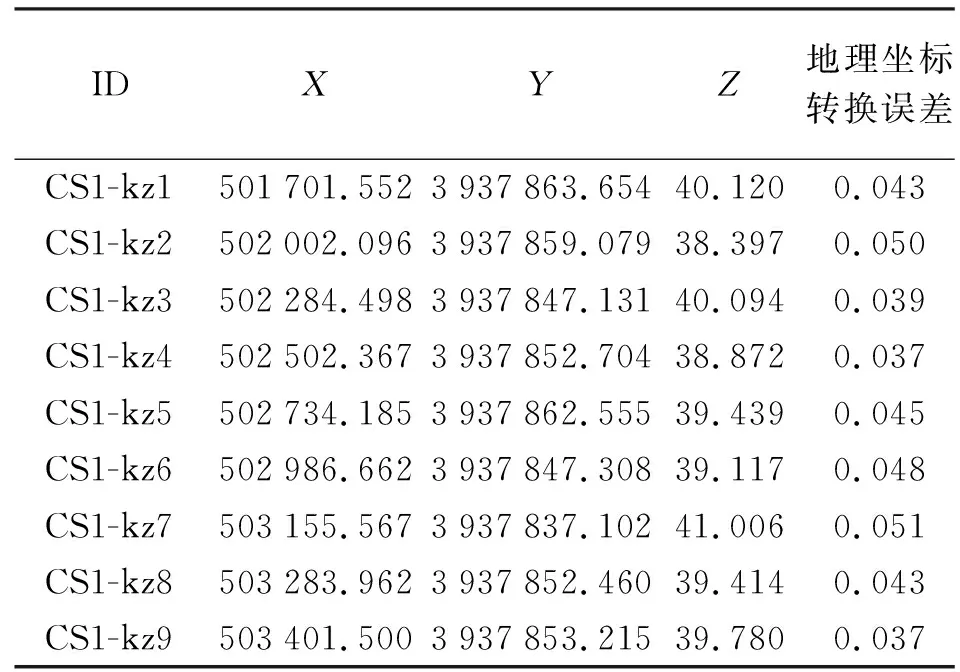
表2 测试2地理坐标转换控制点残差
2.3.4 精度验证
本项目测区前期已经使用无人机航测技术手段获取了正射影像,并制作了CAD公路规划设计图,可以直接使用已有数字成果在TRW中对GeoSLAM点云成果进行精度检核。
2.4 数据成果
2.4.1 点云三维实景数据
在扫描道路后,通过TRW点云处理软件对获取的点云成果数据将项目现场实景复制到电脑中,可以更好地结合实景进行道路规划、设计。
2.4.2 基于实景点云的统计分析
基于实景点云可以进行桥涵统计、电力设施统计、拆迁统计等公路改建前期调研工作。
2.4.3 DEM生成
使用TRW点云处理软件快速将点云中的植被与建筑剔除,获取地面点云。完成点云滤波后,直接获取DEM高程点云,可以在TRW中将其抽稀后输出为DWG高程点,也可以直接生成高程网格模型,并进一步生成道路横、纵断面、填挖方报告、等高线等延伸应用。
2.4.4 道路设计及放样
结合无人机航拍正射图并利用道路专用设计软件进行道路的选线,并生成路线曲线要素,运用TBC通道模板创建道路水平定线并输入道路曲线要素,如图6所示。
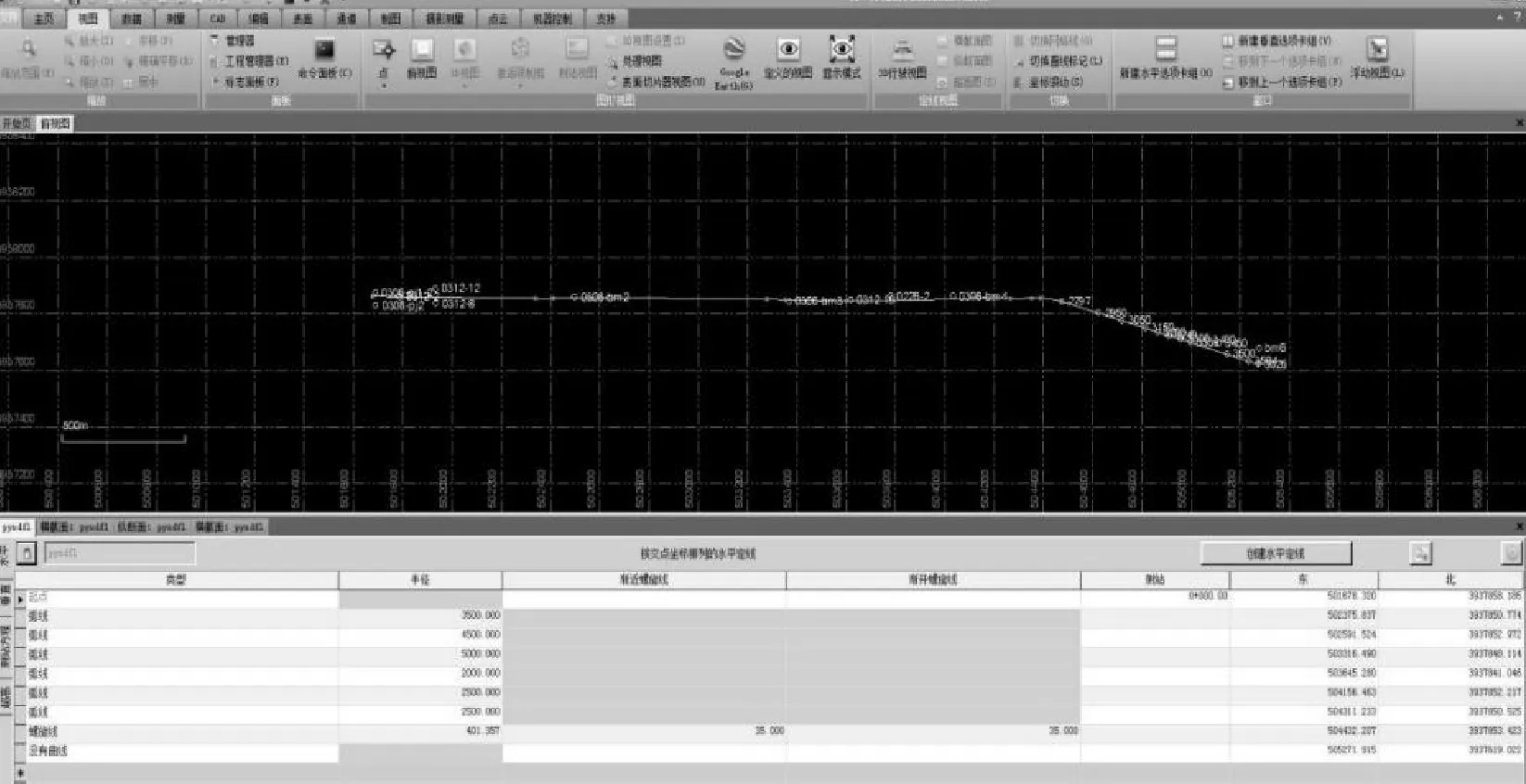
图6 道路水平定线
运用TBC通道模板创建竖直定线并输入道路曲线要素,如图7所示。
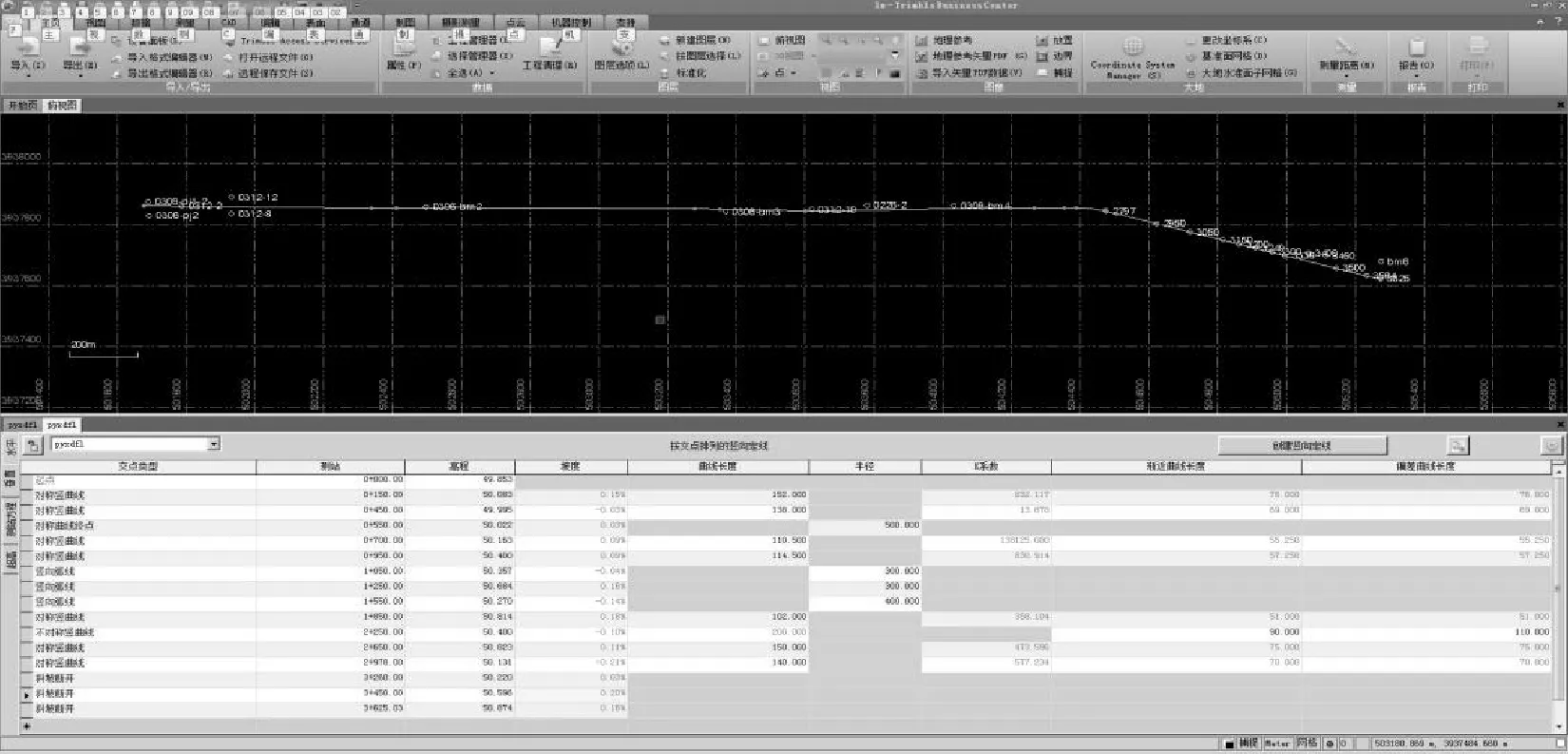
图7 道路竖直定线
运用TBC通道模板创建超高段模型,如图8所示。
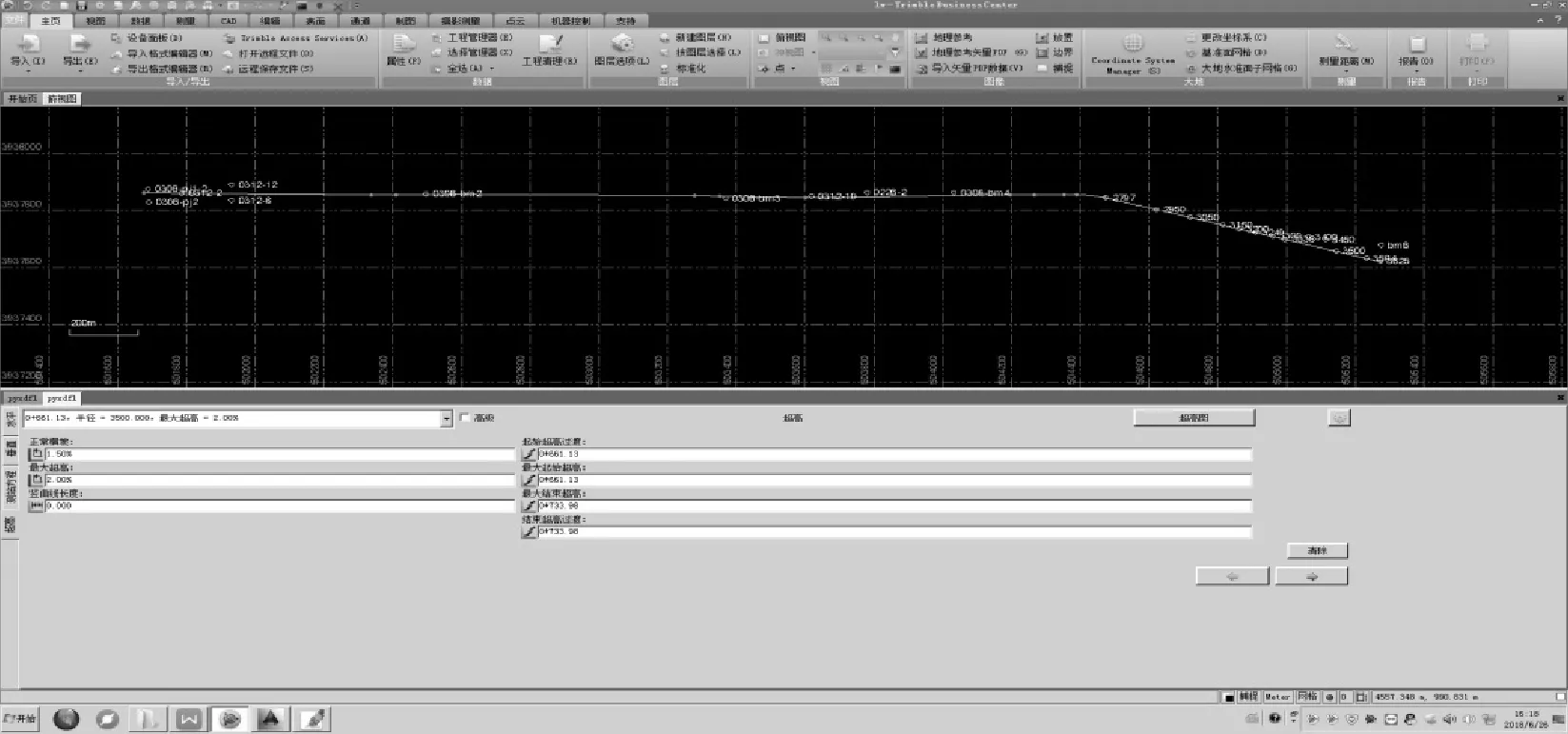
图8 超高段参数输入
利用TBC通道模块输入路线曲线要素后并导出RXL格式的道路放样文件,将RXL格式的道路文件导入TSC3手簿进行外业放样工作,如图9所示。
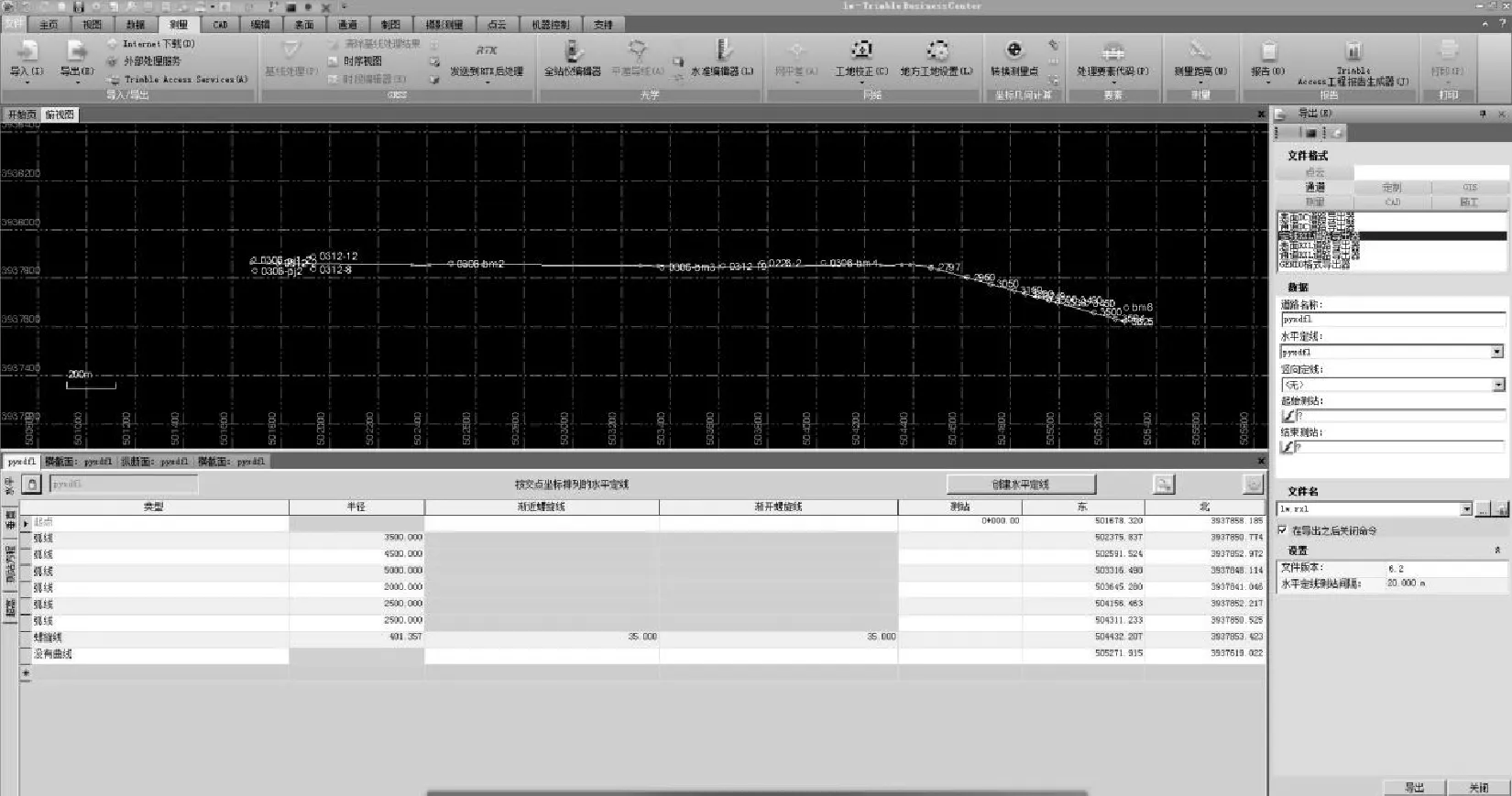
图9 导出RXL道路放样数据
3 结 语
使用GeoSLAM移动测量设备,同时搭配TRW、TBC等内业点云编辑与处理系统,提供了丰富的数据成果,能够满足公路测设中的外业数据采集、内业数据处理以及外业道路放样的需要。可将不进行任何数据转换的设计数据无缝导入外业设备,进行交桩、放样等,可使整个道路设计简单、快速、准确,值得探索推广。
猜你喜欢
云南画报(2021年11期)2022-01-18 03:15:34
作文与考试·初中版(2020年18期)2020-06-19 08:55:27
工程与建设(2019年5期)2020-01-19 06:22:34
中华建设(2019年4期)2019-07-10 11:51:00
城市道桥与防洪(2019年5期)2019-06-26 00:55:18
铁道通信信号(2018年8期)2018-11-10 05:15:42
铁道通信信号(2018年8期)2018-11-10 05:15:38
高中生·天天向上(2016年12期)2017-02-28 08:23:52
铁道通信信号(2016年4期)2016-06-01 12:10:19
山西建筑(2014年21期)2014-08-01 02:02:00
