
极限学习机辅助下路域植被叶面积指数的反演
2018-10-09 03:54:32雷宇斌朱善宽郭云开李丹娜
测绘通报 2018年9期
雷宇斌,朱善宽,郭云开,李丹娜,刘 磊,刘 宁
(1. 湖南省第二测绘院,湖南 长沙 410000; 2. 中交上海航道勘察设计院有限公司,上海 200000; 3. 长沙理工大学测绘遥感应用技术研究所,湖南 长沙 410076)
叶面积指数(leaf area index,LAI)是指单位水平地面面积上所有叶片的投影面积之和,它与植被的蒸腾作用、光合作用有关,是表征植被生长状态的重要参数。获取大面积路域植被LAI对于开展植被健康状况监测具有重要意义[1]。传统LAI获取的方法主要依靠野外地面实际测量,这种方法无法满足大面积作物长势和生态监测的需求。遥感具有探测周期短、范围广、全天候等优势,为大面积获取LAI提供了可能。
遥感技术反演LAI主要有物理模型和经验模型两种方法。物理模型具有很强的物理基础,普适性较好,但应用时输入的参数较多,模型复杂,难以推广使用。经验模型是以光谱反射率或植被指数为自变量、以LAI为因变量建立回归模型的估算方法。这种方法原理简单,计算方便,易于推广,是目前国内外利用遥感技术反演LAI最常用的方法。
研究表明LAI与光谱反射率或植被指数之间的关系基本上是非线性的,机器学习方法因其高度的非线性映射能力,得到了广泛的应用。郭琳等[2]通过支持向量机(SVM)对广西兴宾县甘蔗LAI进行了反演研究,对比发现SVM反演精度高于指数、对数模型。梁栋等[3]基于SVM反演了冬小麦的LAI,并取得了较好的效果,RMSE为0.42,精度为81.7%。近几年,极限学习机(ELM)在遥感领域得到了一定的应用。马伟波[4]基于ELM对江苏徐州北郊矿区的Cu、Zn、Cr等重金属进行了反演,结果表明EIM的预测精度比SVM和PLS(偏最小二乘)要高。宋英强[5]运用ELM反演了西安蔬菜地土壤有机质的空间分布,数据表明ELM预测的RMSE为0.631 g/kg,优于SLR(逐步线性回归)、SVM和RF(随机森林)方法。但是,ELM在路域植被LAI反演领域的应用还鲜有尝试。
为此,本文以湖南省醴潭高速为试验对象,以GF-1影像和地面同步实测数据为基础,引入ELM方法建立LAI反演模型,与经验回归模型和SVM的反演结果进行对比,探索ELM在路域植被LAI反演中的潜力。
1 研究区域与数据获取
1.1 研究区域概况
本文试验区为湖南省境内的醴潭高速路段。该试验区位于113°03′E—113°22′E,27°48′N—27°56′N之间,属于亚热带季风性湿润气候,四季分明,光热充足,雨量充沛,年平均气温在16°C~18°C之间。该试验区整体为东南—西北走向,地貌类型多为丘陵、山地、岗地等,地势起伏较大,道路两侧植被以常绿阔叶林为主,生长茂盛,种类繁多,便于路域植被LAI反演研究。
1.2 遥感数据获取及预处理
本试验所用的数据为中国资源卫星应用中心下载的一景GF-1 WFV2影像,空间分辨率为16 m。该影像获取时间为2015年7月30日,整个区域无云,可视性良好。GF-1卫星于2013年4月26日在酒泉卫星发射中心发射成功,现已在农业、气象、环保、国土资源部门发挥着重要的作用。
GF-1影像数据的预处理包括辐射定标、几何校正、大气校正和影像裁剪。影像辐射校正所需的绝对辐射定标系数和大气校正中的波谱响应函数由中国资源卫星应用中心下载。几何校正以一景带有准确空间位置的TM影像进行,校正误差控制在0.5个像元范围内。
1.3 野外实测数据获取
试验区的野外实测LAI由叶面积指数仪LAI-2200获取,数据采集工作于2015年7月29日至2015年7月31日进行,正值南方地区植被生长旺盛的夏季,当天天气晴朗无云,共采集42个样区。选择的样区要求植被空间分布均匀,主题植被明显。对每个样区以1个中心点和4个顶点进行5次测量,为避免居民点、道路等建设用地高反射率的干扰,样区应在此类地物100 m之外,取5次测量的平均值作为该样区LAI的最终取值。样区的位置采用差分GPS精确定位。
2 研究方法
2.1 极限学习机模型理论
极限学习机(ELM)是Huang等[6-7]在单隐含层前馈神经网络(SLFN)基础上发展出来的一种新型神经网络算法。Huang等发现,在SLFN中,当隐含层神经元的激励函数g(x)无限可微时,若隐含层神经元个数K小于等于训练集样本数N,则对任意的输入层神经元与隐含层神经元的连接权值w和隐含层神经元的偏置b,SLFN网络的训练误差可以逼近一个任意小的数ε(ε>0)。其中,w和b只需要在SLFN网络训练前随机选取,并在训练过程中可保持不变。而隐含层与输出层之间的连接权值β可通过最小二乘法求解以下问题获得
(1)
式中,H为隐含层输出矩阵;T为SLFN网络的输出矩阵。
可解得
(2)

2.2 建模因子的确定
植被的光谱反射信息是由植被叶片和植被冠层的特征决定的。不同的光谱通道获得的光谱信息可以反映植被的不同状态,如绿光波段(0.52~0.59 μm)可以区分植被的不同类别,红光波段(0.63~0.69 μm)可以反映植被叶面吸收光谱的情况。基于此,可以建立植被反射光谱与植被信息的函数来反演植被的生理参数,但是仅靠单个波段或多个单波段数据来反映植被的生长状况和生物量等信息是十分局限的。需要对原来的光谱进行线性或非线性运算处理,生成能够对植被生长等信息更有效表达的参数,即植被指数。植被指数能够在一定程度上消除大气、水分、土壤背景等因素的影响,更好地反映植被的生长状况[8]。在查阅国内外相关文献的基础上,本文提取GF-1影像单波段反射率ρBlue、ρGreen、ρRed、ρNIR和植被指数RVI、DVI、NDVI、TVI、SAVI、MSAVI参与LAI反演建模,其中6种植被指数的计算公式见表1。
2.3 评价模型的确定
本文对于LAI的建模及预测效果的评价,选用决定系数R2、均方根误差RMSE和精度EA这3个参数进行。其公式见表2。
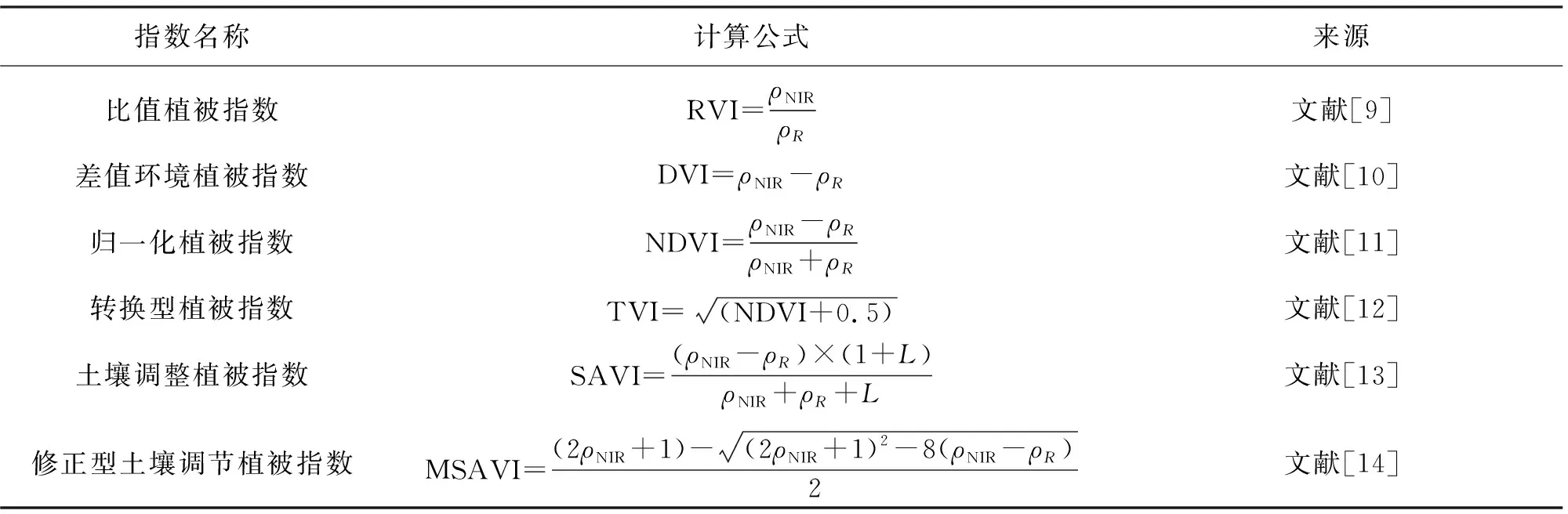
表1 植被指数计算公式
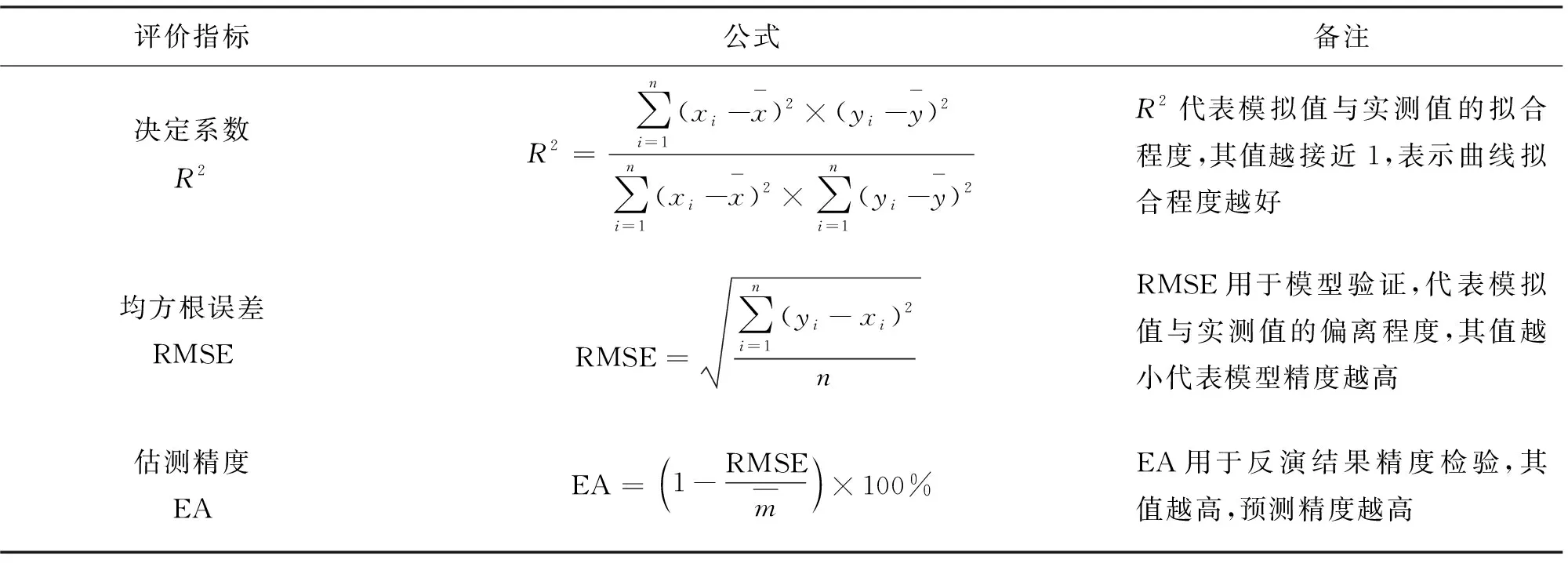
表2 模型检验指标

3 试验结果分析
3.1 经验回归模型反演LAI
本研究分别采用线性、二次、乘幂、指数和对数等5种回归形式对路域植被LAI与提取的遥感因子逐一进行回归建模分析。从野外实测的42组数据中,随机选取28组用于反演因子与LAI的回归模型建立,剩下的14组数据用于回归模型反演精度的检验。各遥感因子反演LAI的精度见表3。
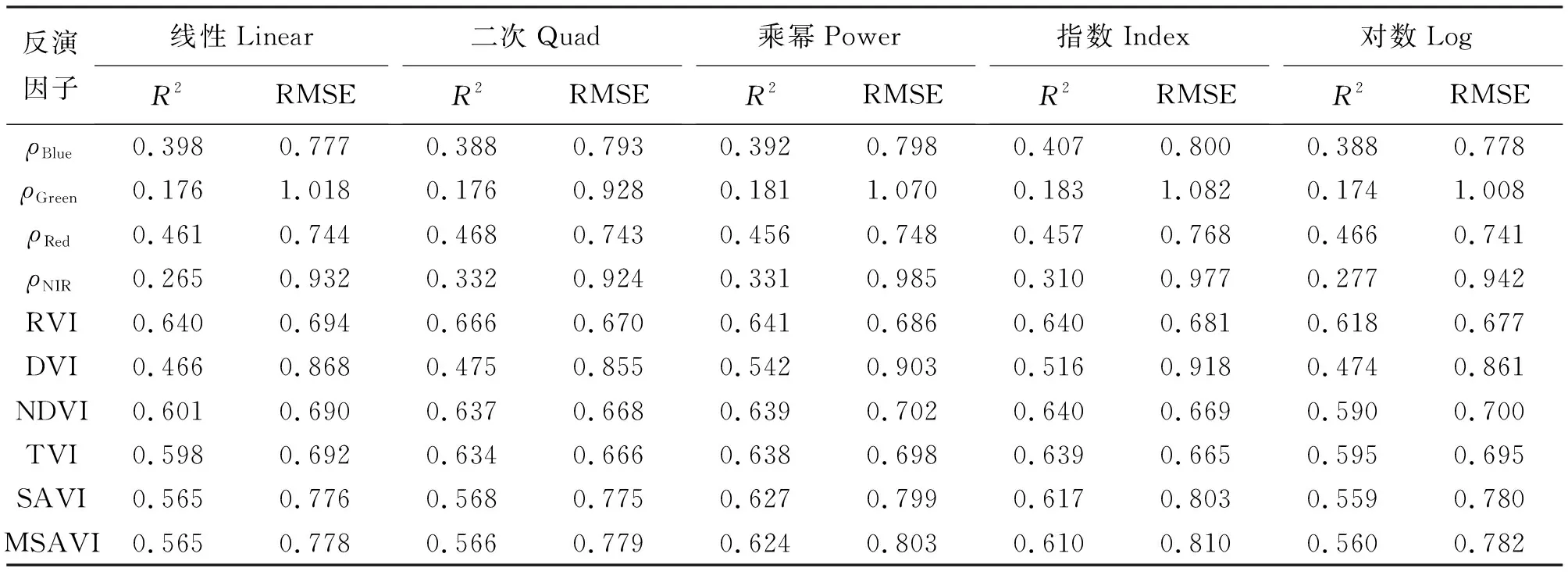
表3 植被LAI经验模型反演精度对比
综合考虑各个模型的R2和RMSE,LAI反演最优的模型为TVI的指数模型,R2为0.639,RMSE为0.665,其拟合曲线及最优模型如图1所示。为了进一步检验回归模型的反演精度,对TVI指数模型反演的LAI与实测的LAI进行回归分析,如图2所示。从图中可以看出,LAI反演预测值与地面实测值之间存在一致的线性关系,RMSE和精度EA分别为0.665和81.0%。
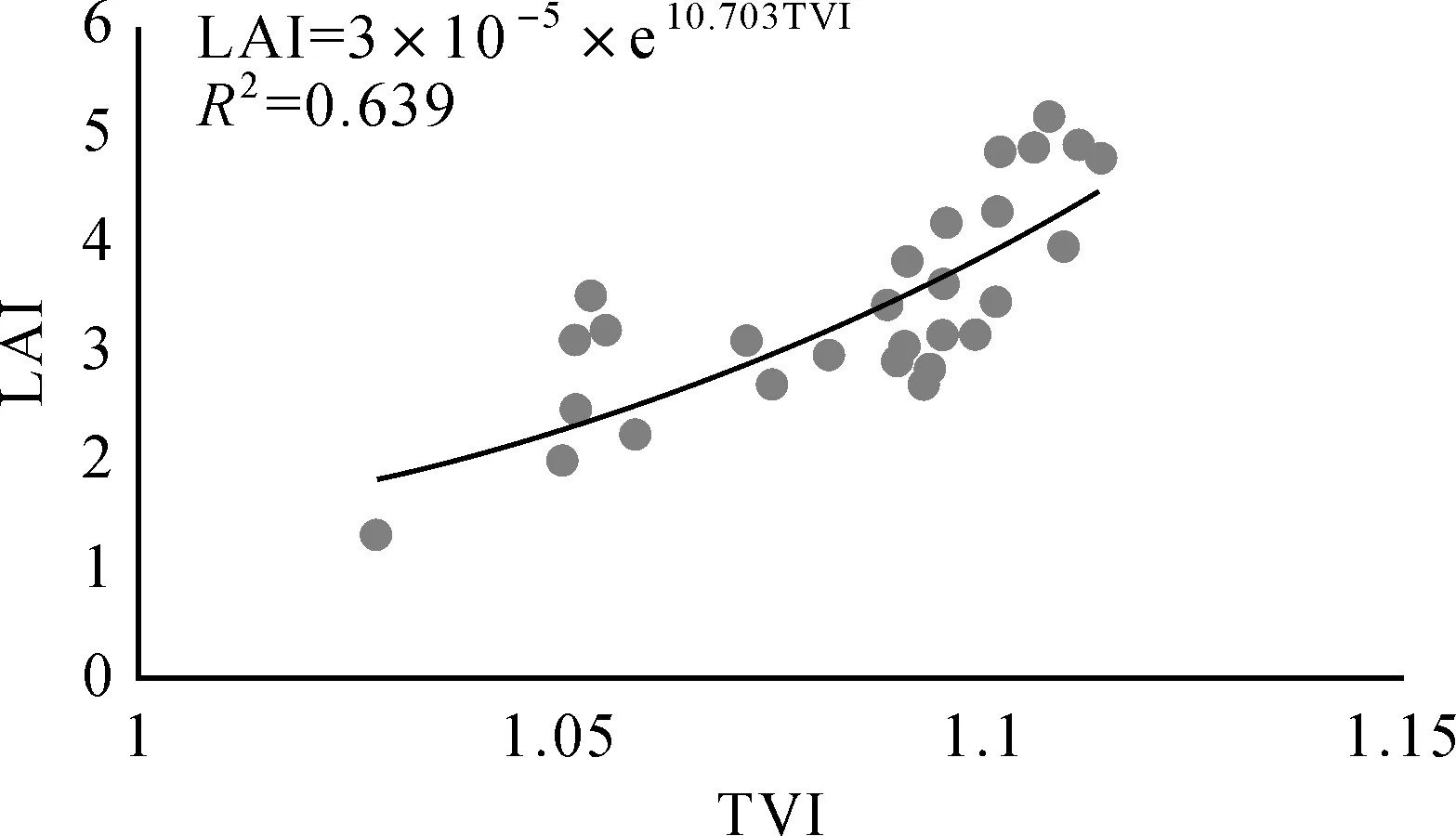
图1 LAI反演的最佳模型
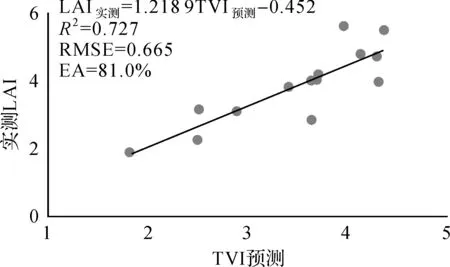
图2 LAI预测值与实测值回归分析
3.2 极限学习机反演LAI
由上节的回归分析可知,ρBlue、ρGreen、ρRed、ρNIR与LAI的相关性相对较低,判定系数R2均小于0.5,因此选用剩下的6种植被指数作为ELM模型的输入参数,在MatlabR2014b中编程实现。利用ELM算法进行LAI预测时,只需确定ELM算法的激励函数和隐含层神经元的个数。本试验选取的激励函数为Sigmoidal,为了确定隐含层神经元的最佳个数,则将个数初始化为1,并按照步长1增加到28(训练样本数),选用RMSE来确定最佳神经元个数。
从图3可知,随着神经元个数由1增加到28,RMSE先减小后增大。当神经元个数设置为14时,RMSE取得最小,预测效果达到最佳。在相同试验条件下,用SVM方法对LAI进行建模反演,ELM与SVM反演LAI的精度对比见表4,两种方法的LAI预测值与实测值之间的拟合曲线如图4所示。
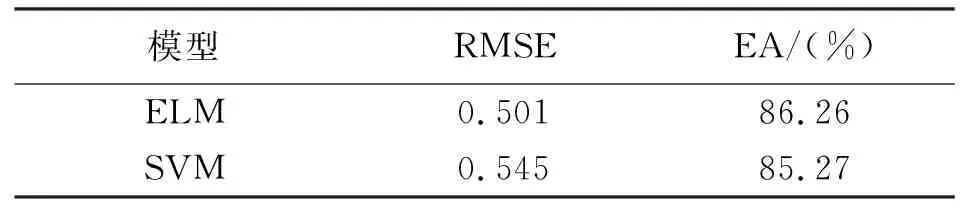
表4 ELM与SVM反演LAI精度对比
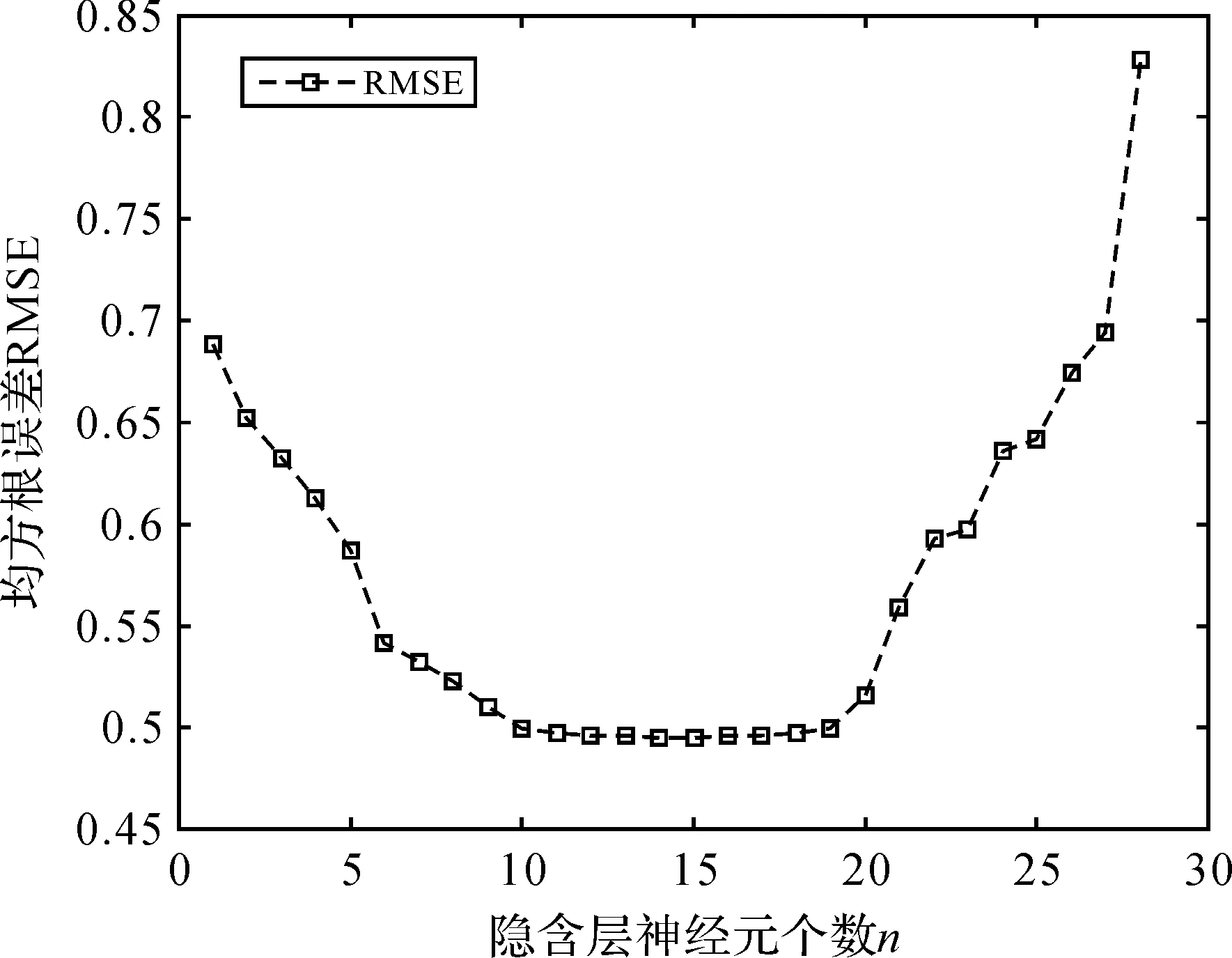
图3 神经元个数对预测LAI的RMSE的影响
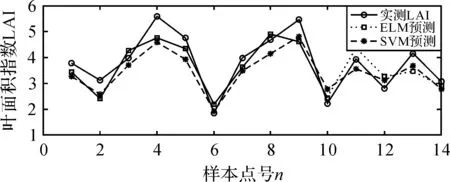
图4 基于ELM和SVM的LAI预测值与实测值的拟合图
从图3、图4及表4可知,两种机器学习方法的LAI预测值与实测值拟合情况较好。相对于经验回归模型,两种方法的预测的精度都明显提高,ELM的RMSE为0.501,精度为86.26%,SVM的RMSE为0.545,精度为85.27%,ELM的LAI预测精度高于SVM的预测精度。
用训练好的ELM模型对醴潭高速两侧1 km的缓冲区影像进行LAI反演,生成的LAI空间分布如图5所示。从图5可以看出,LAI高值区主要集中在研究区的西北和东南部,LAI从西北到东南的空间过渡变化与实际调查基本相符,说明ELM模型有较高的反演精度。
4 结 论
本文利用GF-1影像和地面同步实测LAI数据作为基础,分别采用经验回归模型、SVM、ELM这3种方法对湖南省醴潭高速路域植被LAI进行建模反演,试验结果表明:
(1) 经验回归模型、SVM、ELM 都可以对路域植被LAI进行有效预测,表明GF-1影像可以在总体趋势上对LAI进行较好程度的描述。
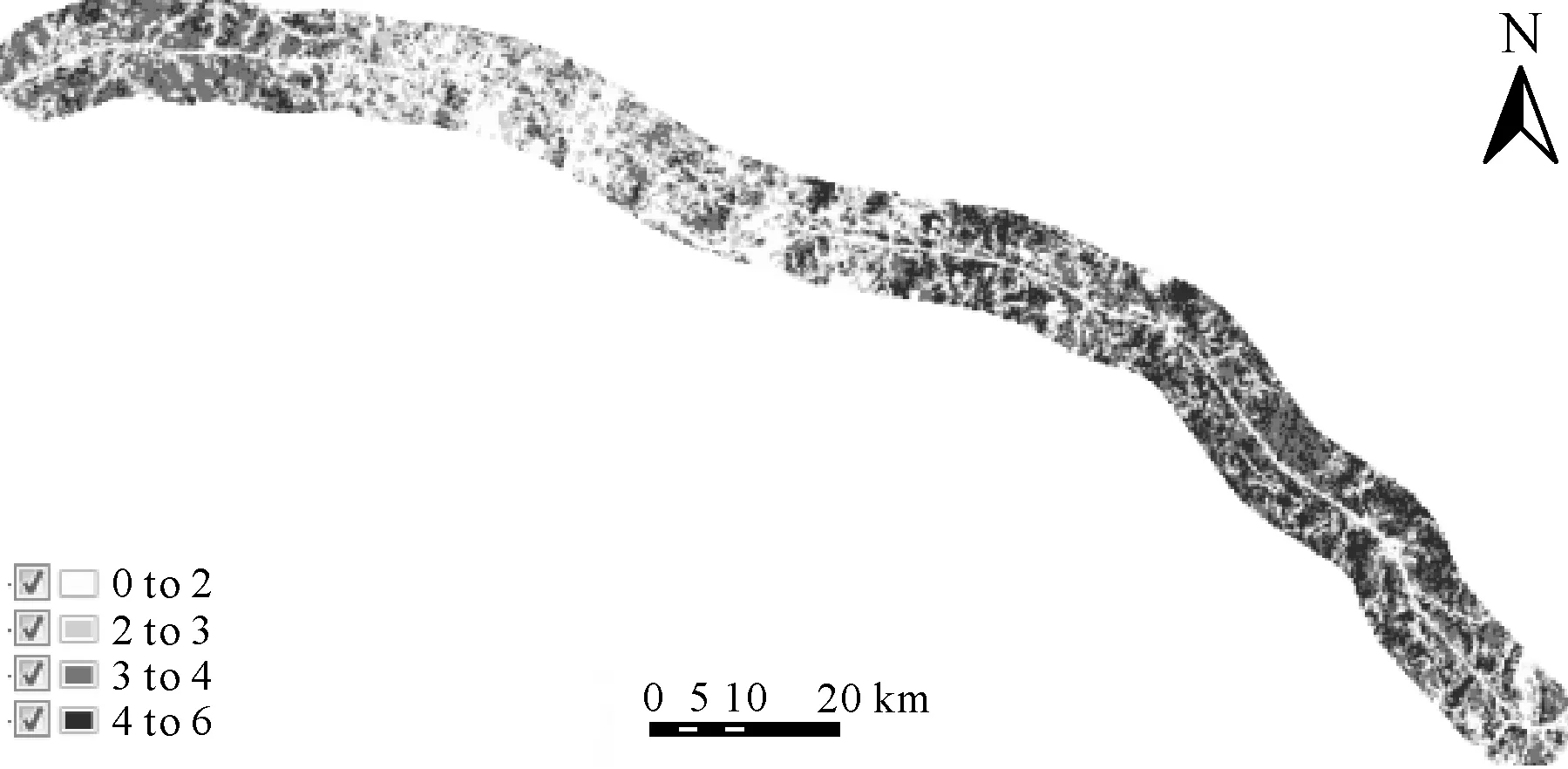
图5 LAI空间分布
(2) 在经验回归模型反演LAI过程中,TVI指数模型反演精度最高,这与植被生长过程中LAI的变化机理趋于一致,在植被叶片从新芽长到最大过程中,随着叶片增多和叶片展开完全,植被LAI呈指数模型增大。
(3) 相对于经验回归模型,两种机器学习方法预测精度都明显提高,说明机器学习方法比经验回归方法有预测优势。ELM方法反演的LAI高于SVM的反演精度,说明ELM更有优势。
本文方法为LAI反演提供了一种新的思路。
猜你喜欢
中国交通信息化(2023年10期)2023-11-30 06:03:44
中国交通信息化(2022年7期)2022-10-27 06:36:28
中等数学(2022年5期)2022-08-29 06:07:38
水土保持研究(2018年5期)2018-10-12 05:29:52
中国农业信息(2018年2期)2018-07-28 08:02:10
中国公路(2017年19期)2018-01-23 03:06:29
石油地球物理勘探(2017年4期)2017-12-18 07:14:55
石油地球物理勘探(2017年2期)2017-11-23 06:02:04
中国公路(2017年13期)2017-02-06 03:16:33
西藏科技(2015年1期)2015-09-26 12:09:29
