卫星传感器时空覆盖能力评估与优选组合系统设计与实现
2018-10-09 03:05陈能成刘晓林龚健雅
测绘通报 2018年9期
陈能成,刘晓林,龚健雅
(1. 武汉大学测绘遥感信息工程国家重点实验室,湖北 武汉 430079; 2. 地球空间信息技术协同创新中心,湖北 武汉 430079)
随着“地球将披上一层电子皮肤”愿景的提出,空间信息获取正从单一传感器模式发展为多传感器协同观测新模式[1]。卫星传感器由于其获取信息速度快、范围大、所受限制条件少等特点,已成为地球观测的重要手段之一[2]。卫星传感器利用对地覆盖能力这一基本空间特性完成其对地观测任务[3],不同的卫星传感器空间覆盖特征和覆盖能力也不相同,结合具体观测任务的时空需求对卫星传感器的覆盖能力进行评估,选择最优的传感器或传感器组合完成观测任务,是利用卫星传感器对地球表面进行高效观测的关键。
遥感卫星对地覆盖的现有研究主要集中在基于特殊覆盖要求的卫星轨道设计与卫星调度[4-5]、卫星传感器对地覆盖建模与可视化仿真[6-7]、卫星对地观测效能评估[8-10]3个方面。这些研究主要关注卫星观测系统的普遍观测能力或对某一类观测任务需求的满足度,无法针对具体观测任务完成卫星传感器覆盖能力评估与传感器优选组合。在传感器的观测能力评估问题上,笔者先后提出了多种评估方法[11-13],但还未提供可应用的软件系统。在软件系统方面,美国AGI公司开发的卫星工具包Satellite Tool Kit(简称STK)是世界上占有主导地位的卫星仿真软件,功能非常强大。但针对性不强,无法实现特定观测任务下的卫星传感器快速查询和优化组合,而且为美国军方禁运系统,无法满足国内用户的应用需求。其他的如NOAA的NDBC系统[14]、微软公司的SensorMap系统、武汉大学开发的地理空间传感网信息公共服务平台GeoSensor[15]等都只支持传感器的查询检索功能,不支持传感器的覆盖能力评估与优选功能。
针对现有研究的不足,本文设计和实现了卫星传感器时空覆盖能力评估与优选组合系统,旨在为特定观测任务需求下卫星传感器的覆盖能力评估与优选组合提供可用的软件系统。
1 系统设计
1.1 系统结构设计
系统采用如图1所示的自顶向下分层思想进行设计,从上到下分为表现层、业务层和数据层。
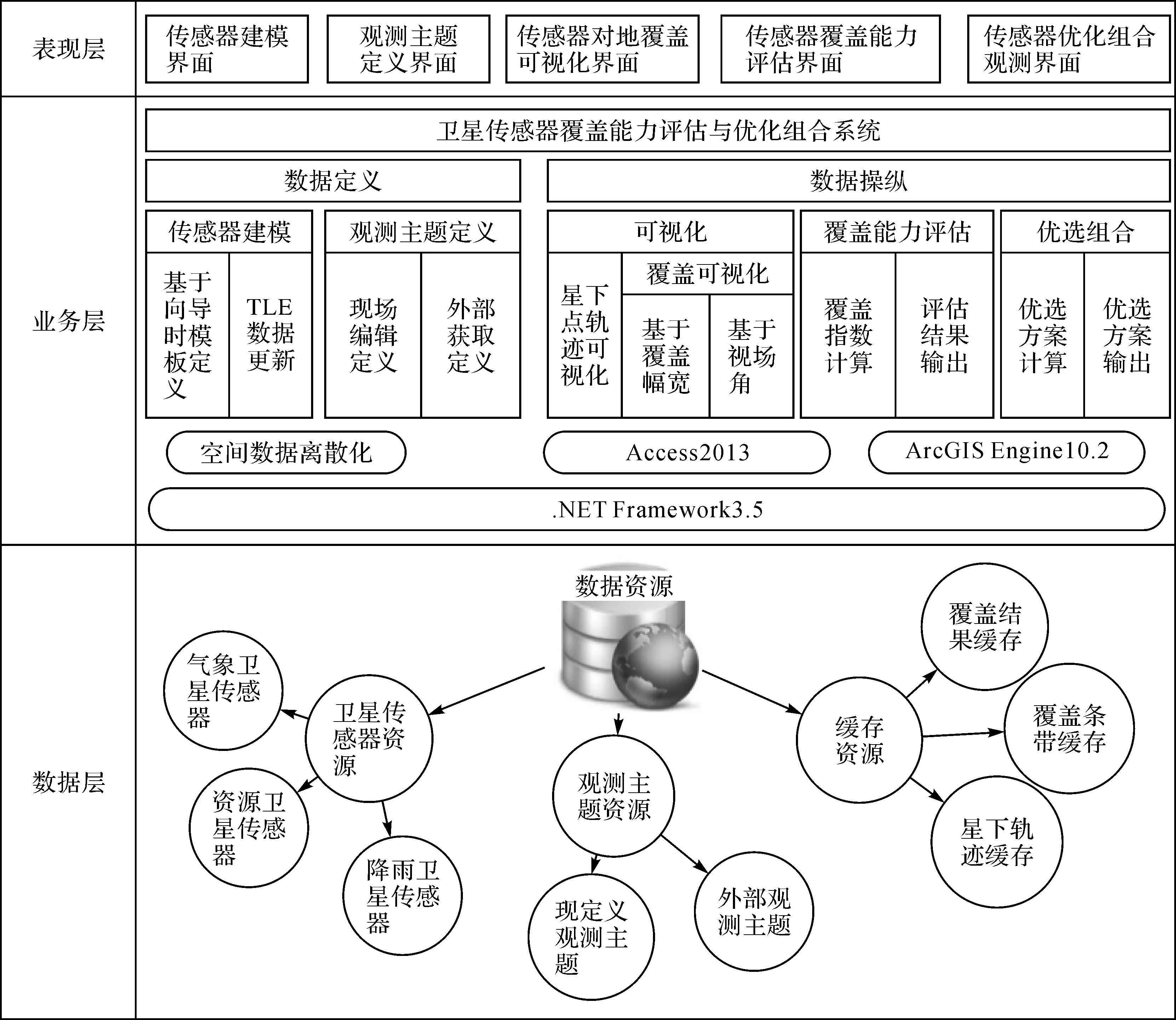
图1 系统体系结构
表现层是基于.NET Framework3.5开发的一系列Windows Form窗体,这些窗体除提供普通交互界面外,还提供传感器建模向导、卫星覆盖仿真结果的可视化、评估及优选报告的展示功能。
业务层是系统的核心部分,实现了传感器评估与优选组合算法。它负责接收用户输入,完成传感器评估与优选核心业务,返回响应结果给用户。
数据层提供各种类型的卫星传感器资源、观测主题资源和卫星传感器对地覆盖条带中间数据资源。
1.2 系统功能设计
根据卫星传感器覆盖能力评估与优选组合系统需求,系统主要分为4大功能模块,其中每个功能模块又分为若干个子模块,共同完成卫星传感器对地覆盖能力评估与优选组合功能。
(1) 传感器建模主要提供传感器模型快速建立及TLE数据更新功能。以向导式的方式引导用户快速构建卫星传感器模型,并自动完成模型的合法性检验。
(2) 观测主题定义提供定义观测主题功能,包括观测区域空间范围及位置、观测时间、观测持续时间段、观测周期及其他特殊观测要求的定义。提供可视化的空间编辑功能和向导式的属性编辑功能。此外,还支持已有观测主题的导入功能。
(3) 可视化子模块主要实现卫星星下点轨迹的可视化、卫星覆盖条带的可视化的相关功能。卫星覆盖条带可根据需要选择基于幅宽或基于传感器视场角生成,默认基于传感器视场角。
(4) 评估与优选模块完成卫星传感器的覆盖面积百分比、覆盖重数、覆盖持续时间等指标评价,并根据评价结果选择各观测时段最优传感器进行组合,得到优选组合观测方案。
2 关键技术
2.1 卫星传感器对地覆盖建模
虽然传感器种类多样,分类标准也不唯一,但在传感器的时空覆盖能力评估及传感器的优选过程中,只需要关注传感器对具体观测任务的时空覆盖范围。由于卫星是沿轨道不断运行的,因此不论卫星的实际视场如何,最终都将形成地球表面的覆盖条带,条带的外沿边界线为传感器视场边界在垂直于星下点轨迹方向的最外侧点所形成的轨迹。
研究卫星传感器的对地覆盖,条带外沿边界点的确定至关重要,尤其是考虑传感器侧摆能力时,情况将更加复杂,对此本文提出了体现传感器最大对地覆盖能力的卫星传感器对地覆盖几何模型,该模型综合考虑了卫星传感器的侧摆能力,对于侧视和非侧视的卫星传感器都适用。模型叙述如下。
如图2(a)所示,S为传感器焦点,X为卫星飞行方向,Z为卫星指向星下点方向,Y为Z和X的向量积,以S为原点,X、Y、Z为坐标轴构成右手坐标系,定义为卫星坐标系。假设传感器可以自由转动,形成一个转动圆O,传感器的所有可能的视线位于圆O内。设传感器覆盖范围内所能达到距离星下点最远距离的点所对应的视线为最大边界视线,用向量l表示,因为传感器可自由转动,因此l一定经过圆O上一点N。当传感器转动时,l在地面上留下的轨迹所组成的封闭范围为传感器所能覆盖的最大范围。最大覆盖范围移动所形成的条带,为最大覆盖条带。当l转动到S-YZ平面时,所对应的覆盖边界点为最大覆盖条带的左右边界,对应的观测视线向量为lL和lR,称为左右最大覆盖观测视线,分别过圆上点NL和NR,覆盖条带边界为L和R。
对于固定式传感器或只能在特定方向摆动的传感器,只需将点N固定在圆O上相应角度位置上即可。对于侧视观测,则覆盖条带的左右边界都在星下点轨迹的一侧,此时左最大覆盖观测视线与圆O的交点NL位于圆内,如图2(b)所示。
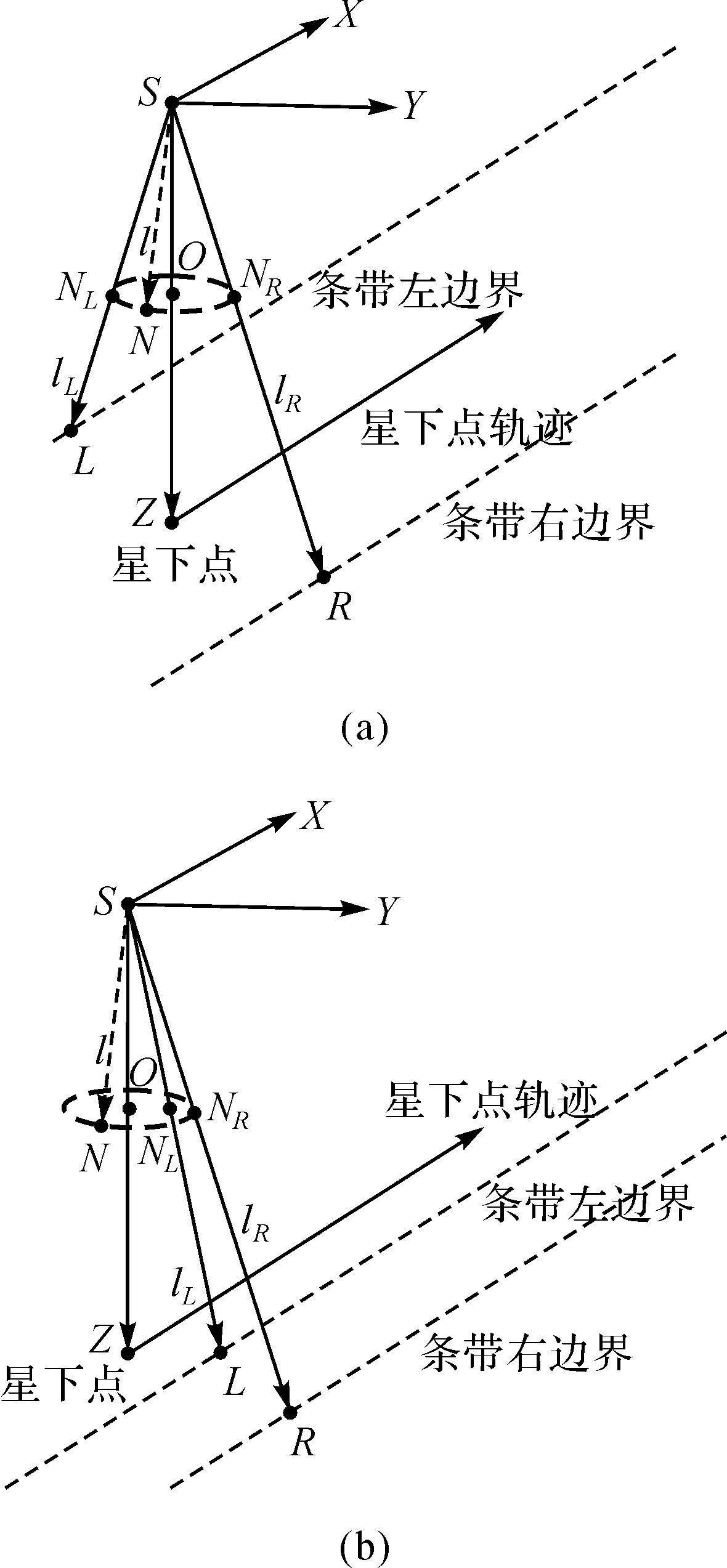
图2 星传感器对地覆盖几何模型
最大覆盖观测视线的向量表示为
l=[0sin(θ±α)cos(θ±α)]T
(1)
式中,θ为最大侧摆角;α为半视场角。为了使最大覆盖条带最大化,传感器的侧摆应在S-YZ平面上进行。
2.2 卫星传感器对地时空覆盖能力综合评价与优选
传感器的综合评价和优选分为静态评价和动态评价两个阶段。如图3所示,在静态阶段,只根据观测主题的静态需求即观测主题类型、空间分辨率需求、时间分辨率需求对候选传感器进行初步的评估和筛选,得到符合条件的传感器作为动态阶段的候选传感器;在动态评价阶段,完成传感器对具体观测任务的时空覆盖能力评估,计算各传感器对当前观测任务时空覆盖要求的满足程度并以此评价传感器的优劣;经静态评价筛选和动态评价筛选之后,选取对观测任务时空覆盖范围最大的传感器作为最优传感器进行组合,完成优选组合过程。
3 系统实现与验证
3.1 系统实现
3.1.1 传感器建模
传感器模型一共用9项属性来描述,分别为名称、所在卫星名(平台)、空间分辨率、幅宽、视场角、最大侧摆角、是否侧视雷达、初始侧摆角、TLE数据。以向导式的方式引导建模和模型更新。
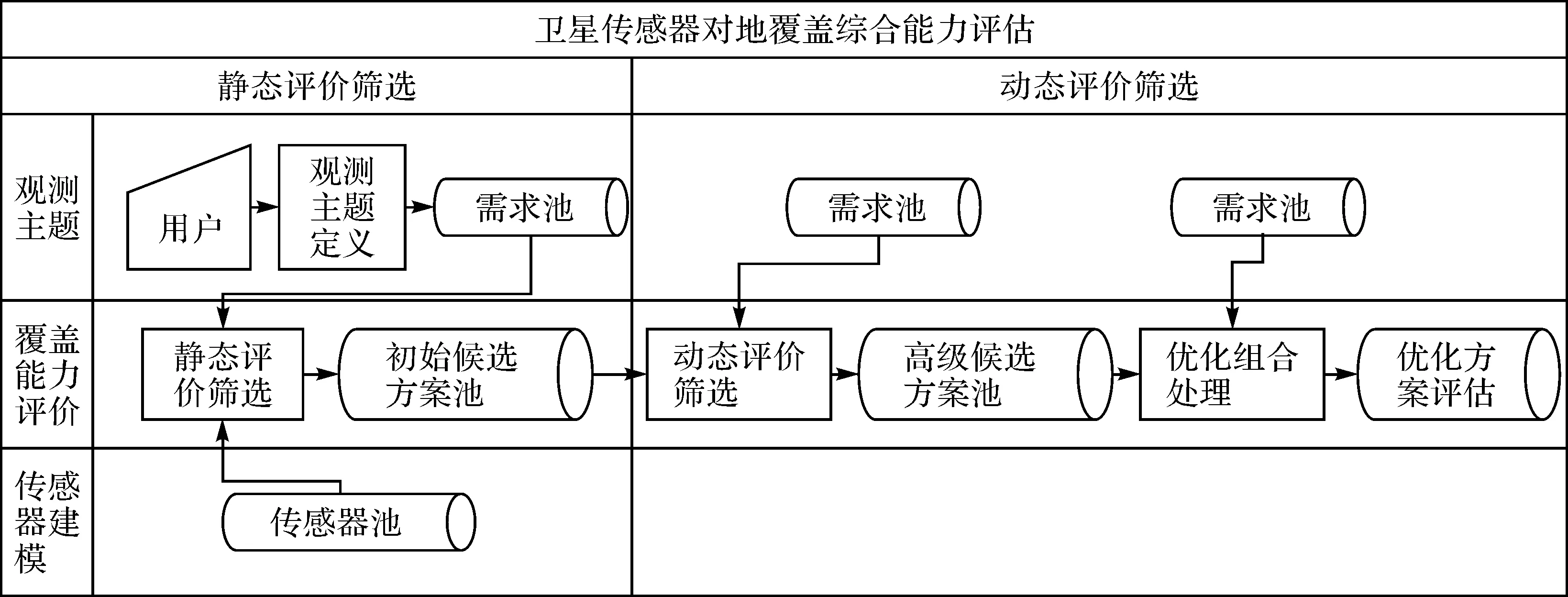
图3 卫星传感器综合能力评价流程
3.1.2 观测任务定义
通过加载在线地图提供定义观测主题的底图。系统提供鼠标绘制和导入外来空间数据两种方式定义观测任务,以矢量数据形式保存。
3.1.3 卫星轨迹与覆盖可视化
星下点可视化生成的为一个Polyline矢量要素类,要素类的名称与传感器的名称一致。离散程度默认为一分钟,即一分钟计算一个卫星位置。
3.1.4 对地覆盖能力评估与传感器优选
评估与优选模块计算传感器对观测任务的覆盖总时长、总覆盖次数、平均覆盖时长和累计覆盖面积百分比统计量,系统以此为基础提供以最大时空覆盖范围为原则的卫星传感器优选组合方案。如图4所示。
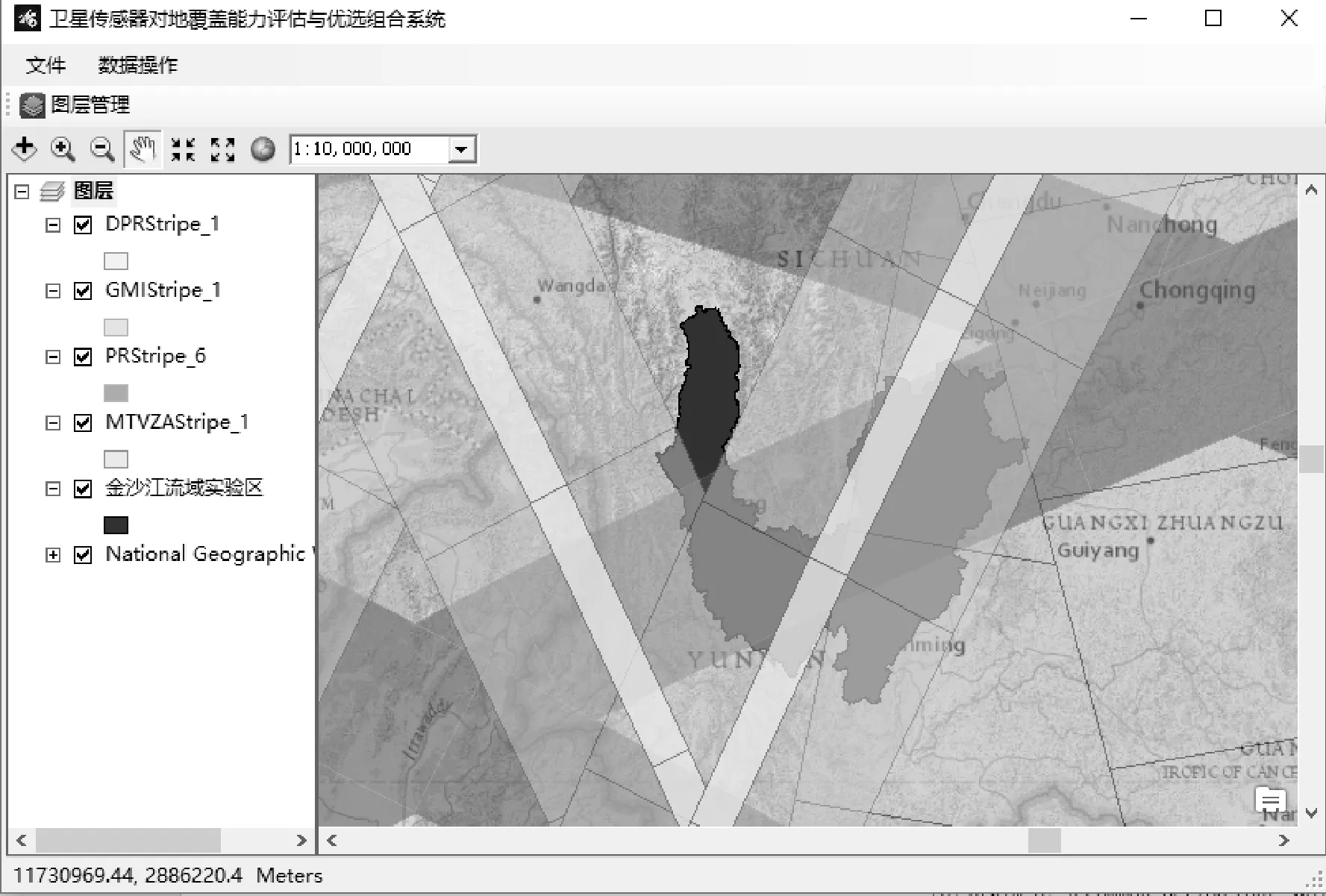
图4 卫星传感器时空覆盖能力评估与优选组合系统
3.2 应用实例
将本系统用于金沙江下游流域洪水应急场景下实施降雨观测的卫星传感器评估与优选组合,并将优选结果与实际观测结果比对,验证系统的可行性。观测时间范围为2014-06-29T00:00:00+08:00—2014-06-30T00:00:00+08:00,观测空间范围为24.461 725°N—29.581 736°N、99.572 968°E—104.946 251°E。部分传感器评估结果见表1,传感器优选组合方案及比对结果见表2。
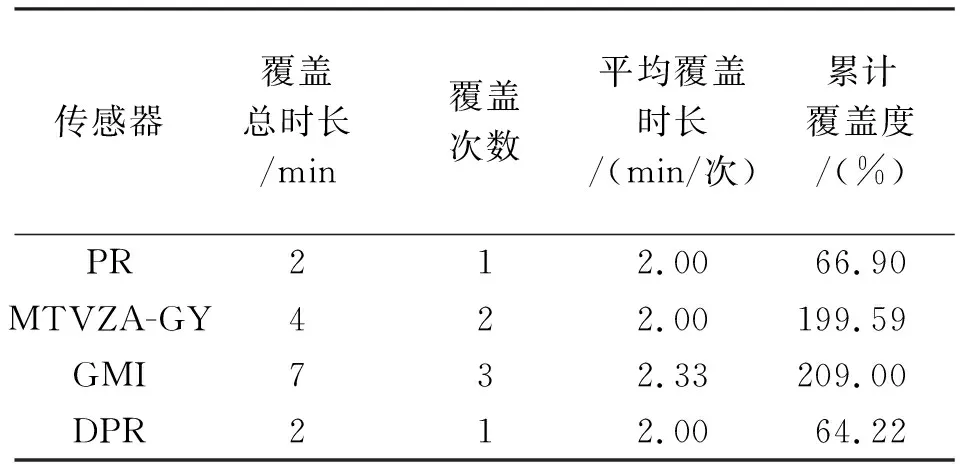
表1 传感器覆盖评估结果
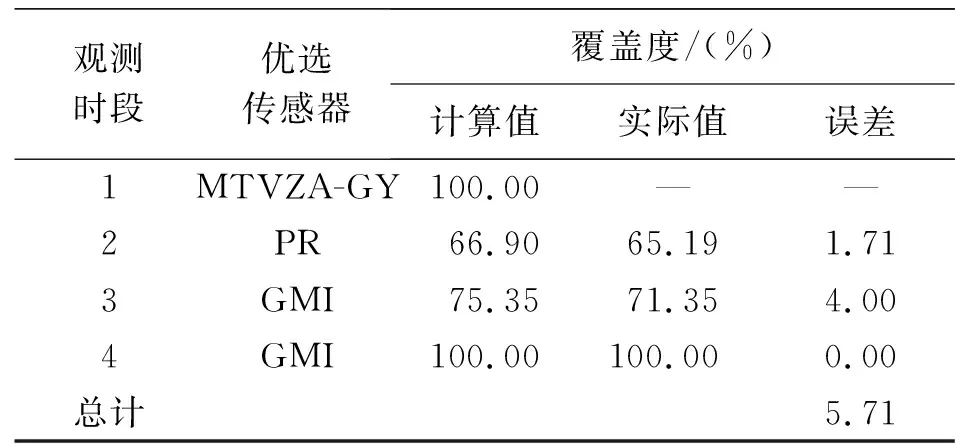
表2 传感器优选结果
4 结 语
本系统实现了具体观测任务需求下的卫星传感器时空覆盖能力评估,可快速查询可用于观测的卫星传感器并生成优选组合观测方案,为实现应急观测场景下卫星传感器的快速发现、覆盖能力评估、观测方案优化提供了有效支持。实例验证结果显示系统计算结果与实际观测结果基本一致,验证了本系统的实用性。
猜你喜欢
世界科学技术-中医药现代化(2022年3期)2022-08-22
计算机应用与软件(2022年6期)2022-07-12
自然灾害学报(2022年2期)2022-05-10
四川党的建设(2022年8期)2022-04-28
师道·教研(2022年1期)2022-03-12
中国学校体育(2021年10期)2021-04-26
小学生学习指导(低年级)(2020年11期)2020-12-14
海洋信息技术与应用(2020年1期)2020-06-11
传媒评论(2019年4期)2019-07-13
作文大王·低年级(2018年10期)2018-12-06